엔코더 설정
이 도구는 엔코더 값과 모션 방향을 확인하고 엔코더 해상도를 계산할 수 있습니다.
스캔 데이터의 Y축 해상도가 X축 해상도와 동일해야 하는 경우, 이 도구를 사용하여 트리거 간격 파라미터의 권장값을 얻을 수 있습니다.
스캔 모드에서 오른쪽 파라미터 패널에서 엔코더 설정 파라미터 오른쪽의 편집 버튼을 클릭하면 엔코더 설정 도구를 열 수 있습니다.
|
엔코더 값과 모션 방향 확인
엔코더 설정 도구 창의 상단에 엔코더 값 및 모션 방향을 확인할 수 있습니다.
-
엔코더 값: 실시간으로 표시되는 엔코더의 값입니다.
-
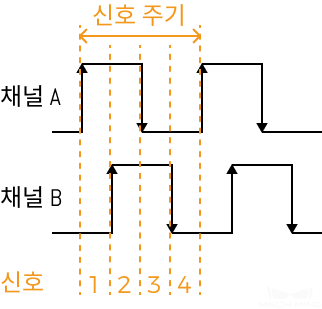
모션 방향: 엔코더가 작동할 때 엔코더 값의 변화에 따라 엔코더의 모션 방향(채널A 선행/채널B 선행)을 표시합니다.
엔코더 해상도 계산
엔코더 해상도는 직교위상 신호 1개에 해당하는 이동 거리, 즉 레이저 프로파일러를 기준으로 아래 그림 속의 각 신호에 해당하는 대상 물체의 이동 거리(단위: μm)입니다. 엔코더 해상도는 트리거 간격의 추천값을 획득하는 데 사용될 수 있습니다.
이 도구는 레이저 프로파일러에 대한 물체의 이동 거리와 해당 엔코더 값을 기반으로 엔코더 해상도를 자동으로 계산합니다.
|
계산된 엔코더 해상도는 어느 정도 부정확할 수 있습니다. |
엔코더 해상도를 계산하려면 다음 단계를 수행하십시오.
-
엔코더 해상도 계산기에서 해상도 계산 옵션을 선택합니다.
-
시작값 오른쪽의 업데이트 버튼을 클릭합니다.
-
레이저 프로파일러를 기준으로 물체를 이동시킵니다. 이동이 완료된 후 최종값 오른쪽의 업데이트 버튼을 클릭합니다.
-
물체와 레이저 프로파일러 사이의 상대 이동 거리를 측정하고 해당 값을 이동 거리(mm)에 입력합니다.
-
계산 버튼을 클릭합니다. 엔코더 해상도 텍스트 상자에 계산된 엔코더 해상도 값이 표시됩니다.
트리거 간격의 추천값 획득
트리거 간격 값을 올바르게 설정하면 스캔 데이터의 Y축 해상도를 기본적으로 X축 해상도와 동일하게 만들 수 있으며 실제 물체의 화면 비율과 일치하는 광도 이미지 및 뎁스 맵을 생성할 수 있습니다.
엔코더 설정 도구를 사용하면 트리거 간격의 추천값을 계산하여 파라미터에 적용합니다.
엔코더 설정 도구를 사용하여 트리거 간격의 권장값을 계산하려면 다음 작업을 수행하십시오.
-
엔코더 해상도를 입력하거나 계산합니다. 이 도구를 사용하면 엔코더 해상도와 트리거 신호 계산 모드 파라미터의 값에 따라 트리거 간격의 권장값을 계산할 수 있습니다.
-
적용 버튼을 클릭하여 현재 창을 닫습니다. 스캔 모드에서 데이터를 다시 획득하고 광도 이미지와 뎁스 맵 중의 대상 물체의 종횡비를 확입하십시오.
-
종횡비가 실제 물체와 일치하면 프로세스가 완료됩니다.
-
종횡비 실제 물체와 일치하지 않는 경우 다음 단계를 수행하십시오.
-
-
트리거 신호 계산 모드의 파라미터 값을 확인하십시오.
-
1× 또는 2×인 경우 단계4를 수행하십시오.
-
4×인 경우 단계7을 수행하십시오.
-
-
엔코더 설정 오른쪽의 편집 버튼을 클릭하여 엔코더 설정 창을 엽니다.
-
트리거 신호 계산 모드의 파라미터 값을 늘리십시오.
-
적용 버튼을 클릭하여 현재 창을 닫습니다. 스캔 모드에서 데이터를 다시 획득하고 광도 이미지와 뎁스 맵 중의 대상 물체의 종횡비를 확입하십시오.
-
종횡비가 실제 물체와 일치하면 프로세스가 완료됩니다.
-
종횡비 실제 물체와 여전히 일치하지 않는 경우 단계3을 반복하십시오.
-
-
광도 이미지와 뎁스 맵 중의 대상 물체의 종횡비를 확인하고 파라미터 패널에서 트리거 간격 값을 조정하십시오.
-
실제 물체에 비해 이미지가 압축된 경우 트리거 간격 값을 1만큼 늘립니다.
-
실제 물체에 비해 이미지가 늘어난 겨우 트리거 간격 값을 1만큼 줄입니다.
-
-
스캔 모드에서 데이터를 다시 획득하고 광도 이미지와 뎁스 맵 중의 대상 물체의 종횡비를 확입하십시오.
-
종횡비가 실제 물체와 일치하면 프로세스가 완료됩니다.
-
종횡비 실제 물체와 여전히 일치하지 않는 경우 단계7을 반복하십시오.
트리거 간격을 조정하여 스캔 데이터의 Y축 해상도를 X축 해상도와 동일한 값으로 설정할 수 없는 경우 X축 해상도를 조정할 수 있습니다.
-