하드웨어 사용자 매뉴얼
안전 주의 사항
|
|
사용 환경
|
|
설치 시 주의사항
|
|
사용 시 주의사항
|
|
DIN 레일 전원 공급 장치 사용 시 주의사항
|
|
|
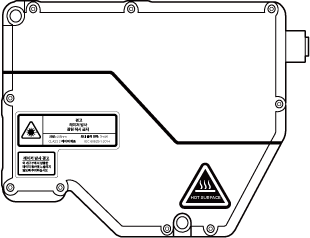
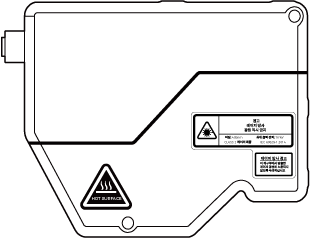
레이저 안전
|
Certifications
The product is compliant with the following standards and assessment requirements. Please note that the certification statuses may be updated. For more information, please contact the local sales agents.
Compliant with the following requirements and standards:
-
European Electromagnetic Compatibility Standards
-
U.S. ANSI C63.4, 47 CFR PART 15B, and UL 61010-1
-
Canada ICES-003
-
Japan VCCI-CISPR 32:2016
-
South Korea KS C 9832 and KS C 9835
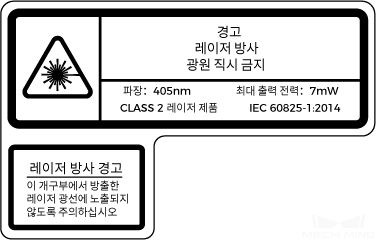
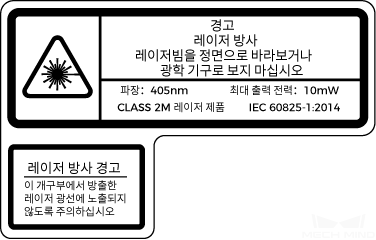
Safety of Laser Products
The laser classification is implemented based on IEC 60825-1:2014 and EN 60825-1:2014+A11:2021 in accordance with the requirements of Laser Notice No. 56 of the FDA (CDRH).
| Model | Maximum output power | Laser class | Wavelength |
|---|---|---|---|
LNX-7515-GL |
7mW |
Class 2 |
405nm |
LNX-7530-GL |
|||
LNX-7580-GL |
10mW |
Class 2M |
|
LNX-75150-GL |
|||
LNX-75300-GL |
|||
LNX-8030-GL |
7mW |
Class 2 |
|
LNX-8080-GL |
10mW |
Class 2M |
|
LNX-8300-GL |





CE

The full text of the EU Declaration of Conformity is available at https://downloads.mech-mind.com/?tab=tab-eu-dec
European Electromagnetic Compatibility Standards:
-
EN 55032:2015+A1:2020+A11:2020
-
EN IEC 61000-3-2: 2019+A1: 2021
-
EN 61000-3-3:2013+A1:2019+A2:2021
-
EN 55035: 2017+A11: 2020

All products bearing this symbol are waste electrical and electronic equipment (WEEE as in directive 2012/19/EU) which should not be mixed with unsorted household waste. Instead, you should protect human health and the environment by handing over your waste equipment to a designated collection point for the recycling of waste electrical and electronic equipment, appointed by the government or local authorities. Correct disposal and recycling will help prevent potential negative consequences to the environment and human health. Please contact the local authorities for more information about the location as well as terms and conditions of such collection points.
FCC
NOTE: This equipment has been tested and found to comply with the limits for a Class A digital device, pursuant to part 15 of the FCC Rules. These limits are designed to provide reasonable protection against harmful interference when the equipment is operated in a commercial environment. This equipment generates, uses, and can radiate radio frequency energy and, if not installed and used in accordance with the instruction manual, may cause harmful interference to radio communications. Operation of this equipment in a residential area is likely to cause harmful interference in which case the user will be required to correct the interference at his own expense.
This device complies with part 15 of the FCC Rules. Operation is subject to the following two conditions: (1) This device may not cause harmful interference, and (2) this device must accept any interference received, including interference that may cause undesired operation of the device.
패키지 리스트
센서 및 부속품
|
|
|
|

|
|
|
||
M5 × 8 볼트, 4개 |
M5 × 70 볼트, 3개 |
M5 와셔, 3개 |
케이블 타이, 50개 |
4mm 육각 렌치, 1개 |
|
|
||
컨트롤러 및 부속품
|
|
|
|
|
|
|
|
|
|
M5 × 8 볼트, 4개 |
일자 드라이버, 1 개 |

|
|
|
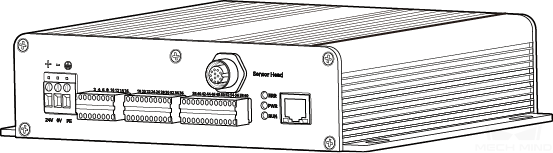
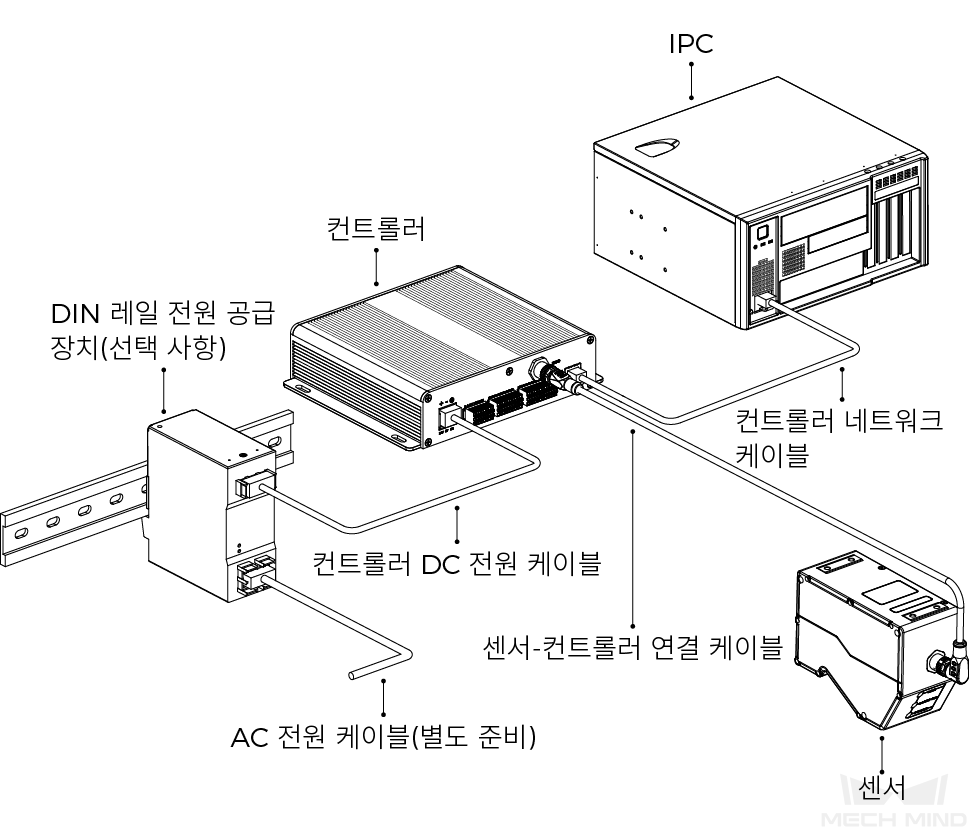
기능 다이어그램
본 제품은 센서와 컨트롤러로 구성됩니다.
|
|
센서 |
컨트롤러 |
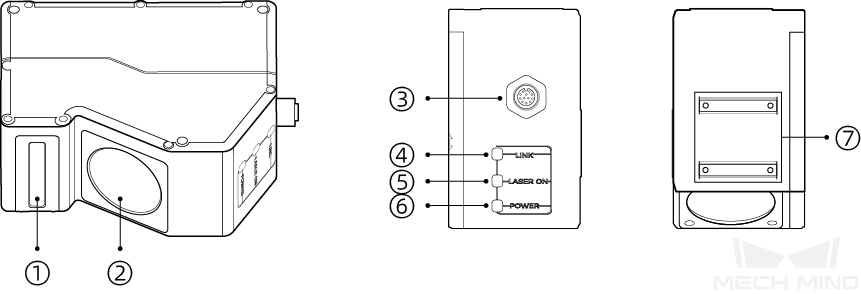
센서
| 번호 | 명칭 | 기능 |
|---|---|---|
① |
레이저 이미터 |
레이저를 발사합니다. |
② |
감광 장치 |
대상 물체 표면에서 반사된 레이저를 수신하는 장치입니다. |
③ |
컨트롤러 포트 |
컨트롤러를 연결하는 데 사용됩니다. 상세한 내용은 컨트롤러 포트를 참조하십시오. |
④ |
LINK 표시등 |
꺼짐: 네트워크에 연결되어 있지 않음 |
녹색으로 깜박임: 데이터 전송 중 |
||
노란색으로 깜박임: 데이터가 전송 중이지만 속도가 평소보다 느림 |
||
⑤ |
LASER ON 표시등 |
꺼짐: 레이저를 발사하지 않음 |
점등: 레이저를 발사하는 중 |
||
⑥ |
POWER 표시등 |
꺼짐: 전원에 연결되어 있지 않음 |
녹색으로 켜져 있음: 전압 정상 |
||
⑦ |
차광 장치 장착 구멍 |
센서에 차광 장치를 장착하는 데 사용됩니다. |
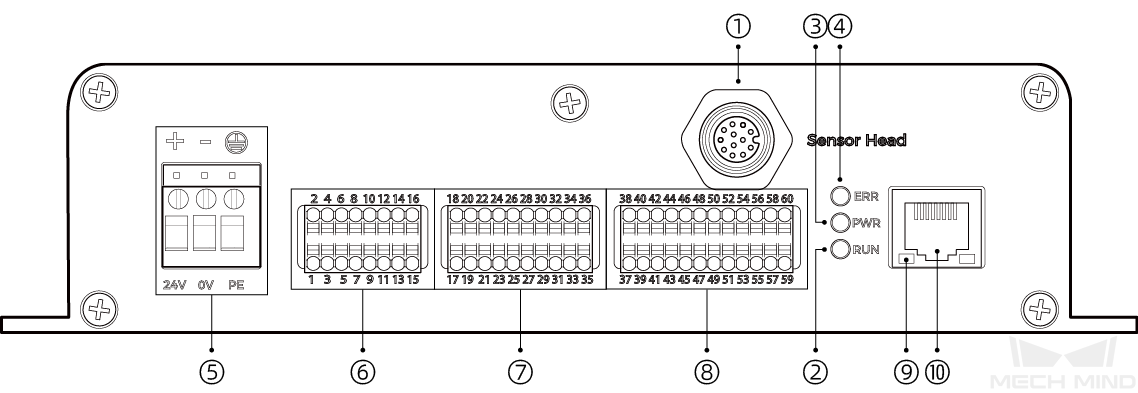
컨트롤러
| 번호 | 명칭 | 기능 |
|---|---|---|
① |
센서 포트 |
센서를 연결하는 데 사용됩니다. 상세한 내용은 센서 포트를 참조하십시오. |
② |
RUN 표시등 |
켜짐: 이미지를 캡처하는 중 |
꺼짐: 캡처하고 있지 않음 |
||
③ |
PWR 표시등 |
녹색으로 켜져 있음: 전압 정상 |
꺼짐: 전압이 비정상이거나 전원에 연결되어 있지 않음 |
||
④ |
ERR 표시등 |
깜박임: 오류 발생 |
꺼짐: 정상 |
||
⑤ |
전원 단자 |
24V: +24V 직류 입력 |
0V: 0V 직류 입력 |
||
PE: 접지 |
||
⑥ |
입력 신호 단자 |
상세한 내용은 입력 신호 단자를 참조하십시오. |
⑦ |
출력 신호 단자 |
상세한 내용은 출력 신호 단자를 참조하십시오. |
⑧ |
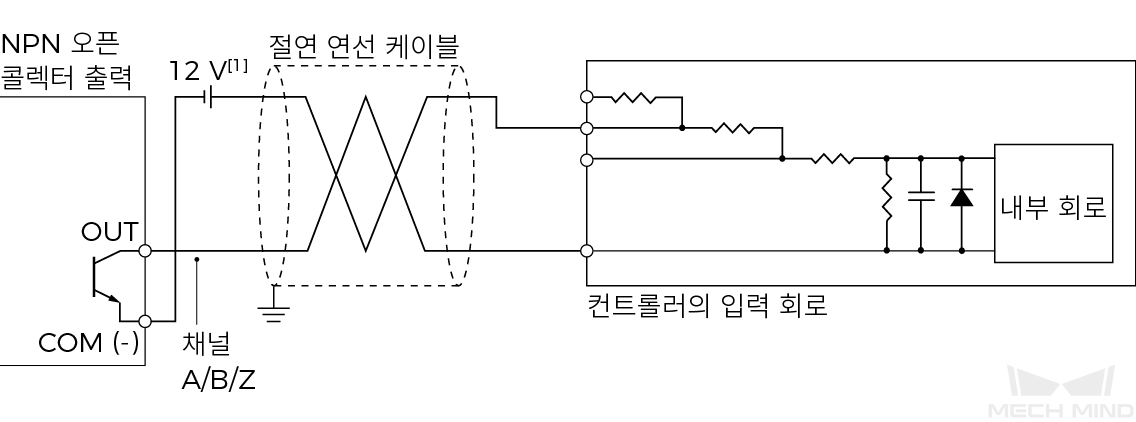
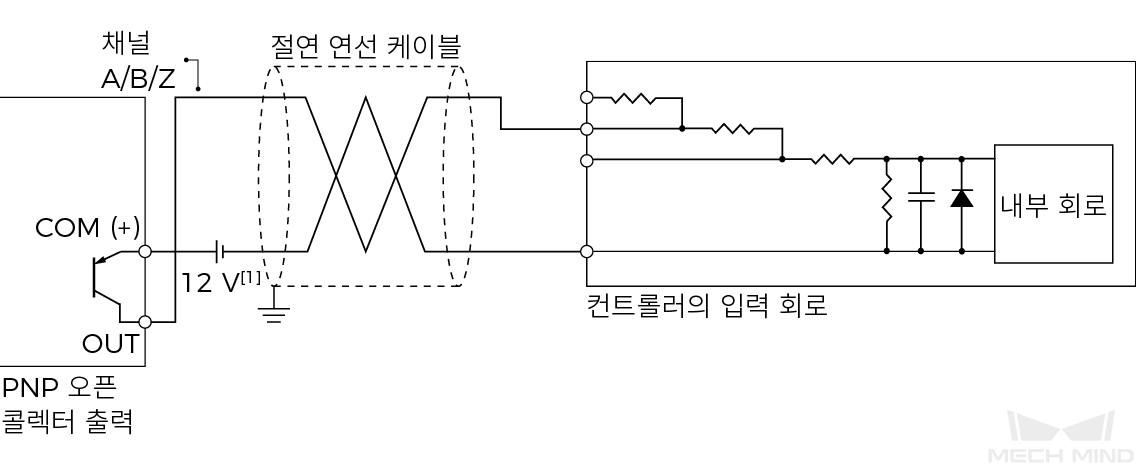
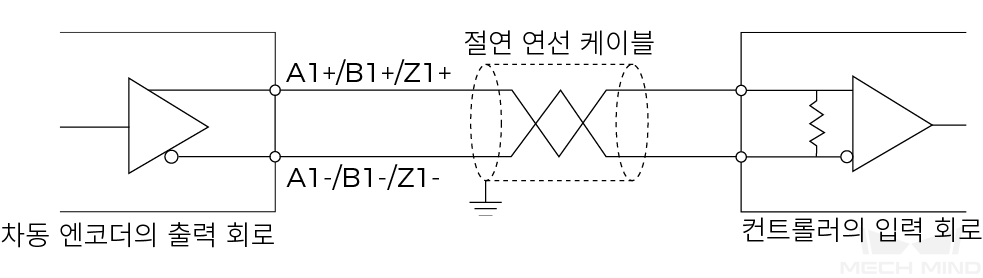
엔코더 신호 단자 |
엔코더를 연결하는 데 사용됩니다. 상세한 내용은 엔코더 신호 단자를 참조하십시오. |
⑨ |
네트워크 표시등 |
깜박임: 데이터 전송 중 |
꺼짐: 데이터 전송 없음 |
||
⑩ |
RJ45 네트워크 포트 |
네트워크 케이블을 연결하기 위한 RJ45 플러그. |
설치 및 연결
|
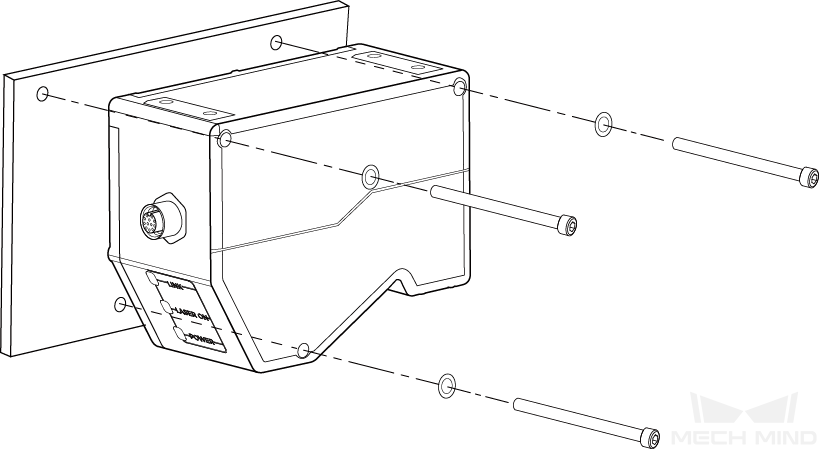
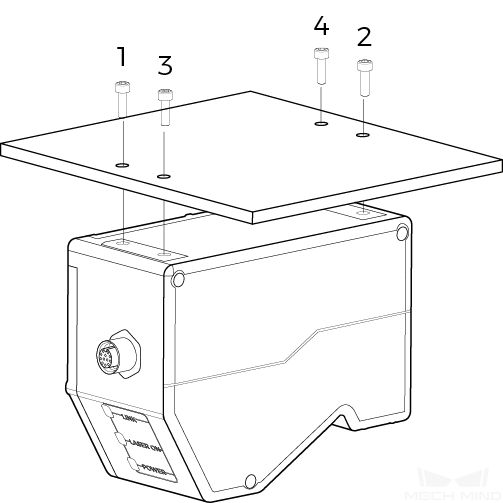
센서 설치
설치하기 전에 다음 주의 사항을 확인해 주시기 바랍니다:
-
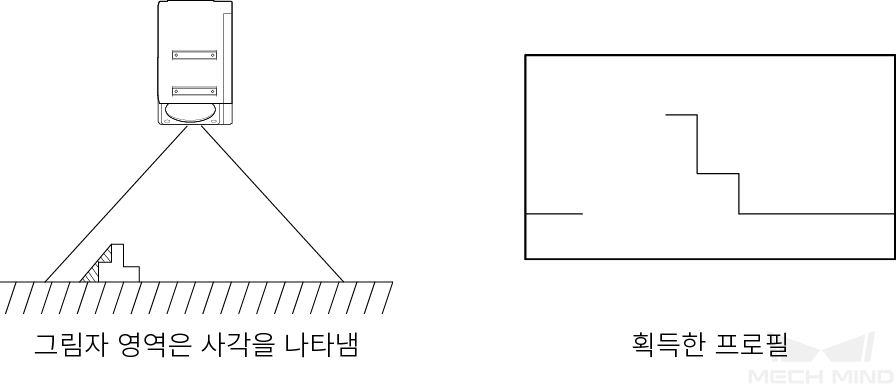
대상 물체의 모양으로 인해 사각이 발생할 수 있습니다. 센서를 장착하기 전에 사각이 스캐닝에 미치는 영향을 판단해야 합니다. 본 제품의 레이저 빔은 평행하게 방출되므로 사각이 거의 없습니다.
-
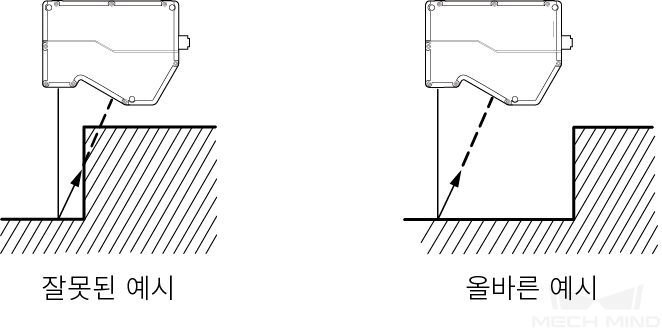
설치 시 대상 물체에서 반사된 레이저 빔이 차단되지 않고 수신 장치에 도달할 수 있는지 확인하십시오.
-
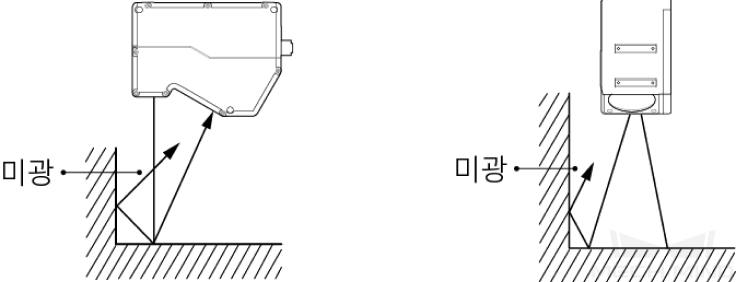
레이저 빔이 벽과 같은 주변 물체에 반사되면 미광이 생성됩니다. 센서를 장착하기 전에 스캐닝에 대한 미광의 영향을 평가하십시오.
-
센서의 원활한 방열을 보장하려면 금속 브래킷에 설치하고 공기와 접촉하는 브래킷 면적이 센서 측면 면적의 3배 이상인지 확인하십시오.
방열 조치에 대한 자세한 설명은 레이저 프로파일러 방열 조치 내용을 참조하십시오.
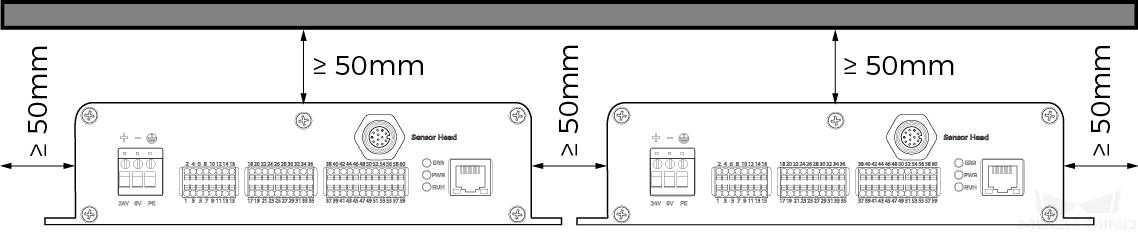
컨트롤러 설치
설치하기 전에 다음 주의 사항을 확인해 주시기 바랍니다:
-
컨트롤러 위와 양쪽에 최소 50mm의 공간을 남겨두십시오. 또한 포트와 커넥터가 있는 측면 앞에 최소 90mm의 공간을 남겨두십시오.

-
컨트롤러를 나란히 설치하는 경우, 인접한 컨트롤러 사이와 위쪽에 최소 50mm의 공간을 확보하십시오.
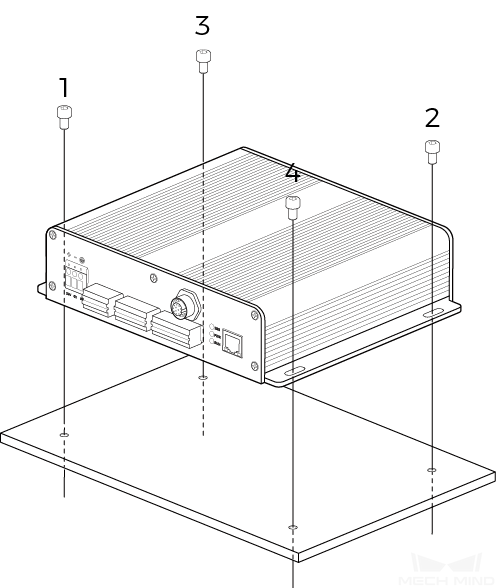
아래 그림과 같이 M5 × 8 볼트 4개를 구멍에 넣은 다음 오픈엔드 렌치를 사용하여 너트를 타이트하게 조입니다.
센서와 컨트롤러 연결
센서-컨트롤러 케이블의 직각 커넥터를 센서의 컨트롤러 포트에 삽입하고 직선 커넥터를 컨트롤러의 센서 포트에 삽입합니다.
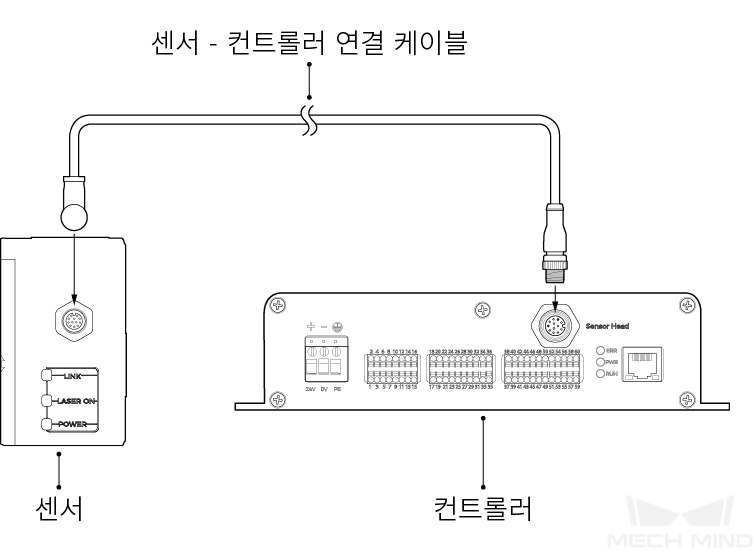
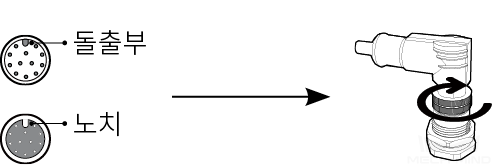
-
센서 - 컨트롤러 연결 케이블의 항공 커넥터 돌출부를 해당 노치에 맞춰서 삽입합니다.
-
너트를 타이트하게 조입니다. 너트를 조일 때 토크의 권장값은 0.7N·m입니다. 너트를 완전히 조인 후에도 약 2mm의 간격이 남습니다.
|
와이어나 커넥터가 변형되어 손상되지 않도록 와이어를 올바르게 고정하십시오. |
컨트롤러와 IPC 연결
컨트롤러의 네트워크 케이블의 한쪽 끝을 컨트롤러의 RJ45 네트워크 포트에 삽입하고 다른 쪽 끝을 IPC의 RJ45 네트워크 포트에 삽입합니다.
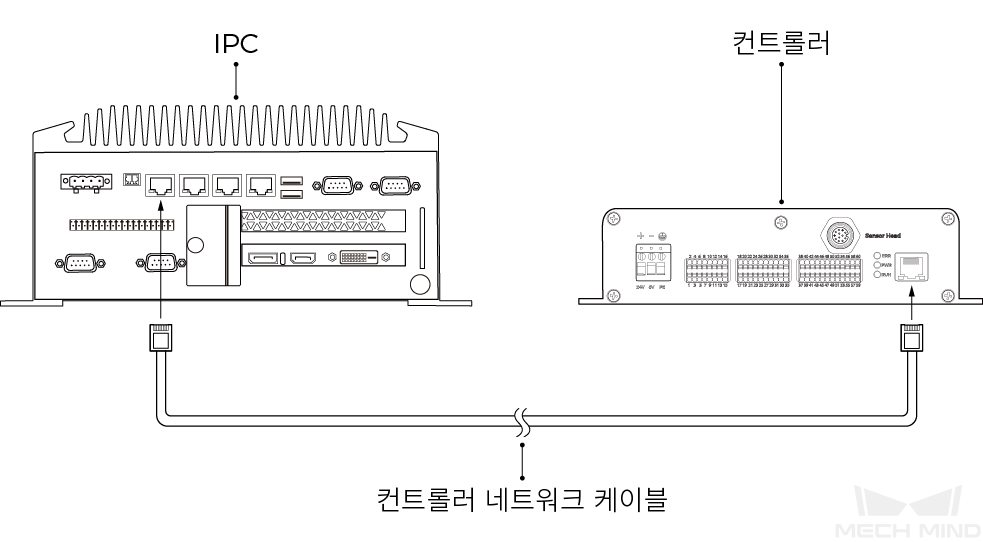
|
컨트롤러와 DIN 레일 전원 공급 장치 연결
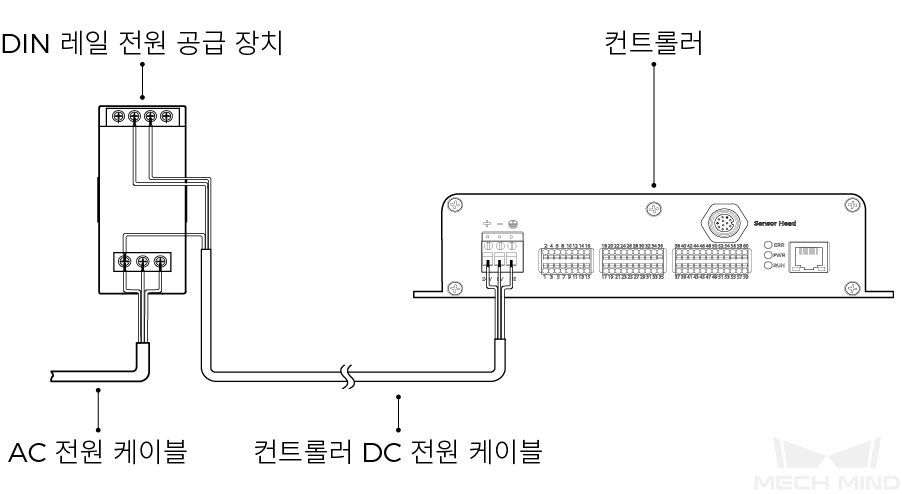
|
컨트롤러 DC 전원 케이블을 컨트롤러에 연결하기
-
일자 드라이버를 사용하여 컨트롤러 전원 단자 위의 나사를 풉니다.

-
+V라고 표시된 와이어를 24V 단자에 삽입하고, -V라고 표시된 와이어를 0V 단자에 삽입하고, PE라고 표시된 와이어를 PE 단자(
 )에 삽입합니다.
)에 삽입합니다.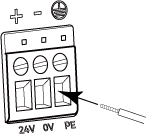
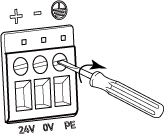
-
일자 드라이버를 사용하여 단자 위의 나사를 조이십시오. 조일 때 토크의 권장값은 0.2N·m입니다.
케이블과 DIN 레일 전원 공급 장치 연결하기
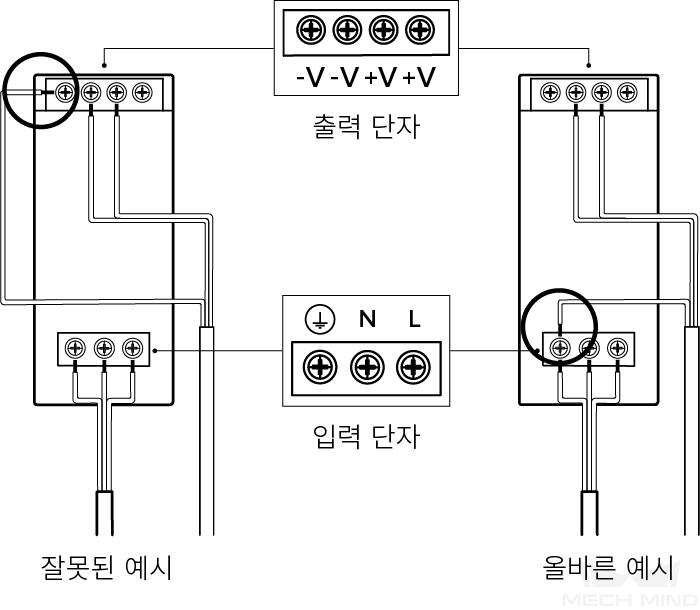
-
일자 드라이버를 사용하여 DIN 레일 전원 공급 장치 단자의 나사를 풉니다.
-
컨트롤러 DC 전원 케이블 연결: +V라고 표시된 와이어를 +V 출력 단자에 삽입하고, -V라고 표시된 와이어를 -V 출력 단자에 삽입하며 PE라고 표시된 와이어를 접지 단자(
)에 삽입합니다. -
AC 전원 케이블 연결: 활선을 L 출력 단자에 삽입하고, 중성선을 N 출력 단자에 삽입하며 접지선을 접지 단자(
)에 삽입합니다. -
일자 드라이버를 사용하여 단자 위의 나사를 조이십시오.
|
신호 단자에 와이어 연결
-
와이어를 삽입할 신호 단자를 선택하고 일자 드라이버를 사용하여 위/아래 버튼을 누릅니다.
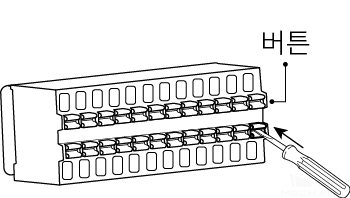
-
와이어를 신호 단자에 삽입한 후 일자 드라이버를 제거합니다.
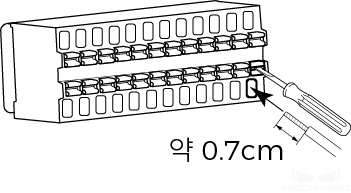
-
와이어의 노출된 부분의 길이는 약 0.7cm여야 합니다. 노출된 부분이 너무 짧으면 배선이 실패할 수 있습니다.
-
와이어의 노출된 부분이 여러 가닥으로 갈라져 있는 경우, 먼저 결합하여 한 가닥으로 꼬은 후 연결하십시오.
-
-
와이어를 살살 당겨봅니다. 와이어가 빠지지 않으면 연결이 완료된 것입니다. 와이어가 빠져 있으면 다시 삽입하십시오.
와이어를 너무 강하게 당기지 마십시오. 강제로 전선이 당겨져 노출된 부분이 손상될 수 있습니다.
와이어를 뽑아야 하는 경우에는 일자 드라이버로 신호 단자 위/아래의 버튼을 누른 후 당겨빼십시오.
신호 회로 다이어그램
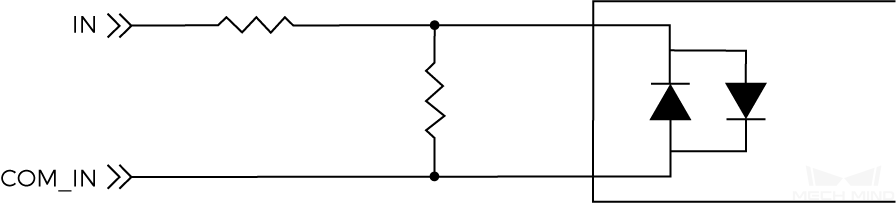
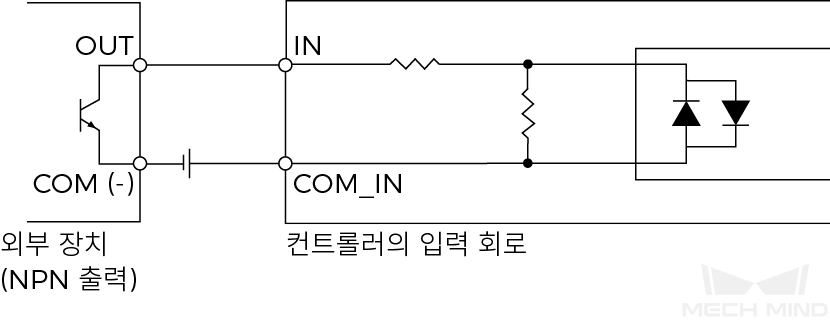
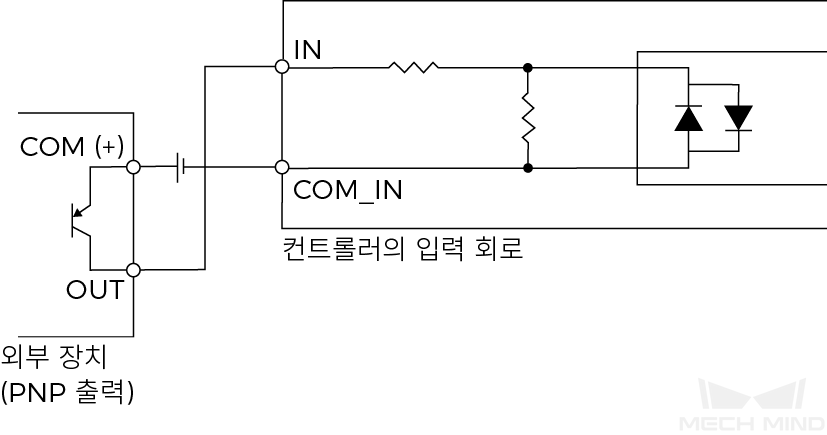
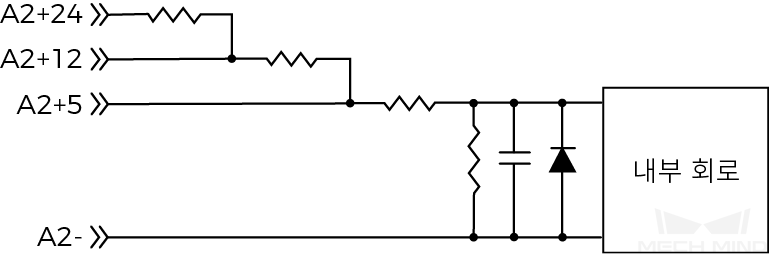
입력 신호
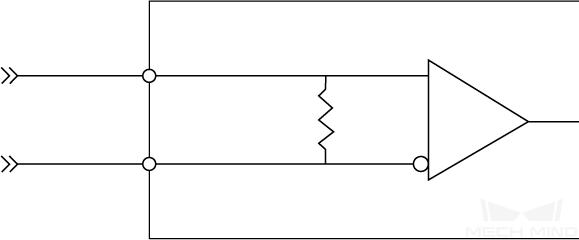
PLC 등 외부 장치의 출력 신호를 컨트롤러의 입력 신호 단자에 입력할 수 있습니다. 다음 그림은 컨트롤러의 입력 신호 회로 다이어그램입니다.
높은 논리 레벨 전압 |
22~26V |
낮은 논리 레벨 전압 |
< 5V |
최소 전류 |
6mA |
최대 전류 |
50mA |
최대 주파수 |
1kHz |
절연 전압 |
2500Vrms (min) |
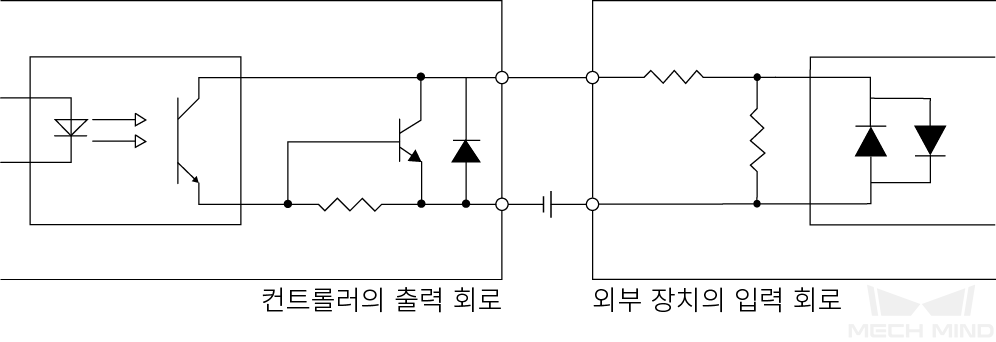
출력 신호
컨트롤러의 출력 신호를 PLC 등 외부 장치의 입력 신호 단자에 입력할 수 있습니다. 다음 그림은 컨트롤러의 출력 신호 회로 다이어그램입니다.

낮은 논리 레벨 출력 전압 |
< 0.3V |
최대 출력 전류 |
20mA |
절단 상태의 누설 전류 |
< 0.5μA |
절연 저항 |
> 1011Ω |
최대 주파수 |
1kHz |
절연 전압 |
2500Vrms (min) |
사용
Mech-Eye SDK의 다운로드 및 설치
본 제품은 함께 제공되는 Mech-Eye SDK 소프트웨어로 제어됩니다. Mech-Mind 다운로드 센터에서 최신 버전의 Mech-Eye SDK 소프트웨어를 다운로드 하십시오.
Mech-Eye SDK 사용
Mech-Eye SDK를 통해 본 제품을 연결하고 제어하여 이미지 및 포인트 클라우드 데이터를 획득할 수 있습니다.
|
처음으로 Mech-Eye SDK에서 본 제품을 연결하는 경우, 제품의 펌웨어를 업그레이드해야 할 수 있습니다. |
유지 보수
클린
클린하기 전에 레이저 프로파일러를 전원에서 분리하십시오. 레이저 프로파일러의 표면을 클린할 때는 깨끗하고 부드러운 천을 사용하여 먼지와 이물질을 부드럽게 닦아주십시오. 유리에 있는 얼룩을 없애려면 렌즈 세제 또는 유리 세제를 떨어뜨린 깨끗하고 부드러운 천으로 유리가 긁히지 않도록 조심히 닦아주십시오.
|
보관
본 제품의 보호 등급은 IP67이고 가루 먼지 또는 물이 센서 내부로 들어가 기능에 영향을 미치는 것을 방지할 수 있습니다. 사용 시 제품을 물에 장시간 담그거나 장시간 야외에 두지 마십시오. 사용하지 않을 때 본 제품을 서늘하고 건조하며 통풍이 잘 되는 실내에 보관하십시오. 본 제품을 보관하는 온도 범위는 -30~70℃입니다.
|
면책 성명서
안전성을 확보하고 EMC 표준을 준수하기 위해 본 제품을 사용할 때 Mech-Mind에서 제공한 전원 공급 장치와 케이블을 사용하는 것이 좋습니다. 타사 전원 공급 장치 및 케이블을 사용하여 발생하는 문제에 대해 Mech-Mind는 책임을 지지 않습니다.
상표 및 법적 고지 사항
Mech-Mind, ![]() 등 Mech-Mind와 관련된 상표 및 표지는 Mech-Mind Robotics Technologies Co., Ltd.(Mech-Mind Robotics) 또는 이와 관련된 단체의 등록된 상표 및 표지입니다. 이는 법률의 보호를 받으며 침해 발생 시 불법행위에 대해 책임을 추궁할 것입니다.
등 Mech-Mind와 관련된 상표 및 표지는 Mech-Mind Robotics Technologies Co., Ltd.(Mech-Mind Robotics) 또는 이와 관련된 단체의 등록된 상표 및 표지입니다. 이는 법률의 보호를 받으며 침해 발생 시 불법행위에 대해 책임을 추궁할 것입니다.
© Copyright 2026, Mech-Mind Robotics Technologies Co., Ltd.
Mech-Mind의 서면 허가 없이 어떤 공공기관이나 개인이 어느 방법이나 이유로 해당 상표의 어느 부분을 사용, 복사, 수정, 유포, 배끼거나 다른 제품과 묶어서 판매할 수 없습니다.
당사의 상표권을 침해하는 경우 불법행위에 대해 책임을 추궁할 것입니다.
이 사용 설명서에 대한 모든 법적 권리는 Mech-Mind에 있음을 고지합니다. 저작권 관련 법에 따라 어떠한 개인 또는 단체도 Mech-Mind의 허가 없이 이 설명서 내용의 일부 또는 전체를 복사, 수정 또는 발표할 수 없습니다. 당사 카메라를 구입한 사용자는 해당 사용 설명서를 다운로드해 인쇄하거나 복사하여 개인적 또는 단체 내부 용도로 사용할 수 있으며, 본 사용 설명서의 내용은 Mech-Mind Robotics의 권한 부여 없이 다른 용도로 사용할 수 없습니다. 본 사용 설명서의 내용은 Mech-Mind의 권한 부여 없이 다른 용도로 사용할 수 없으며 어떤 공공기관 또는 개인도 이 사용 설명서의 내용의 일부 또는 전체를 무단 전재-재배포 할 수 없습니다.