사각지대 필터링
이 도구는 후속 처리에 영향을 미치지 않도록 사각지대로 인해 생성한 잘못된 데이터를 감지하고 제거하는 데 사용됩니다.
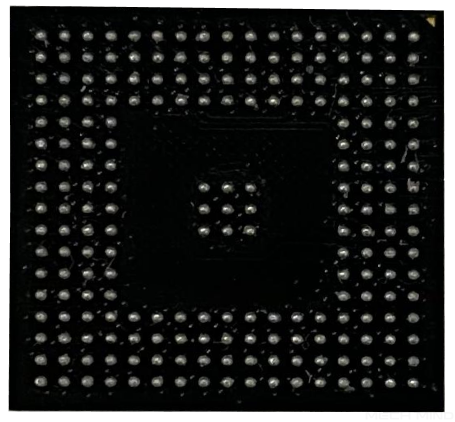
사각지대는 반사된 레이저 빔이 차단되는 대상 물체 표면의 영역입니다. 대상 물체의 표면에 움푹 들어간 곳이나 돌기가 촘촘하게 있는 경우 레이저 빛의 다중 반사가 발생하여 사각지대 근처에서 잘못된 데이터가 생성될 수 있습니다.
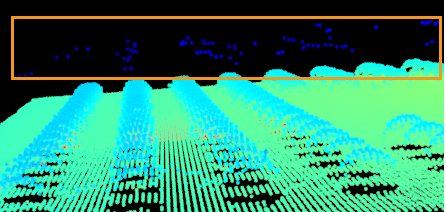
아래 그림과 같이 주황색 프레임 안의 파란색 점이 잘못된 데이터입니다.
| 대상 물체 | 포인트 클라우드 |
|---|---|
|
|
|
사각지대 필터링 도구는 “트리거 빈도”에 근거하여 스캔 데이터의 Y축 해상도를 계산합니다. 라인 스캔 트리거 소스 파라미터의 값은 엔코더로 설정되면, 우선 엔코더 설정 도구를 사용하여 엔코더 해상도를 계산하거나 입력해야 합니다. 그렇지 않으면 사각지대 필터링 도구에서 자동으로 계산된 Y축 해상도의 값은 부정확할 수 도 있습니다. |
다음 단계를 수행하여 사각지대를 필터링하십시오:
-
데이터 획득 영역의
 버튼을 클릭하여 데이터를 한 번 획득합니다.
버튼을 클릭하여 데이터를 한 번 획득합니다. -
사각지대 필터링 오른쪽의 편집 버튼을 클릭하여 사각지대 필터링 도구를 엽니다.
-
이동 방향 아래에서 레이저 프로파일러를 기준으로 하는 대상 물체의 이동 방향을 선택하십시오.
-
Y축 해상도를 확인하거나 계산합니다.
-
엔코더를 통해 스캔을 트리거할 때 Y축 해상도를 확인하십시오.
-
고정 빈도로 스캔을 트리거할 때 이동 속도텍스트 상자에 레이저 프로파일러를 기준으로 하는 대상 물체의 이동 속도를 입력하십시오. Y축 해상도 텍스트 상자에 계산된 Y축 해상도 값이 표시됩니다.
-
-
필터링 정도를 설정합니다. 필터링 정도가 높으면 높을수록 제거된 오류 데이터는 많아지지만 처리 속도는 느려집니다.
-
필터 버튼을 클릭하여 사각지대 필터링 효과를 확인합니다.
-
사각지대 필터링 효과가 요구사항을 충족할 수 있는 경우, 적용 버튼을 클릭하여 설정 사항을 적용하고 사각지대 필터링 도구를 닫습니다.
적용 버튼을 클락하면 마스크 사용 기능은 자동으로 활성화됩니다. 다음에 데이터를 획득할 때, 도구의 설정 사항에 따라 사각지대 필터링이 수행됩니다.
사각지대 필터링 작업이 필요하지 않은 경우, 우선 이 기능을 비활성화하고 데이터를 다시 획득해야 합니다.
-
사각지대 필터링 효과가 요구사항을 충족할 수 없는 경우, 라인 스캔 트리거 소스의 설정값에 따라 처리하십시오:
라인 트리거 소스 처리 방식 엔코더
-
단계5와 6을 반복합니다.
고정 빈도
-
단계5와 6을 반복합니다.
-
Y축 해상도에서 계산 방식을 사용자 정의로 설정하고 기본값을 조정합니다.
필터링 효과가 여전히 요구 사항을 충족하지 못하는 경우 기술 서포트팀에 문의하십시오.
-
-
-
다시 캡처하고 사각지대를 필터링한 후의 뎁스 맵과 포인트 클라우드를 획득합니다.