Mech-Eye SDK 2.4.0 업데이트 설명
이 부분에는 Mech-Eye SDK 2.4.0 버전의 추가된 기능, 최적화된 기능 및 복구된 문제에 대해 소개하겠습니다.
Mech-Eye Viewer
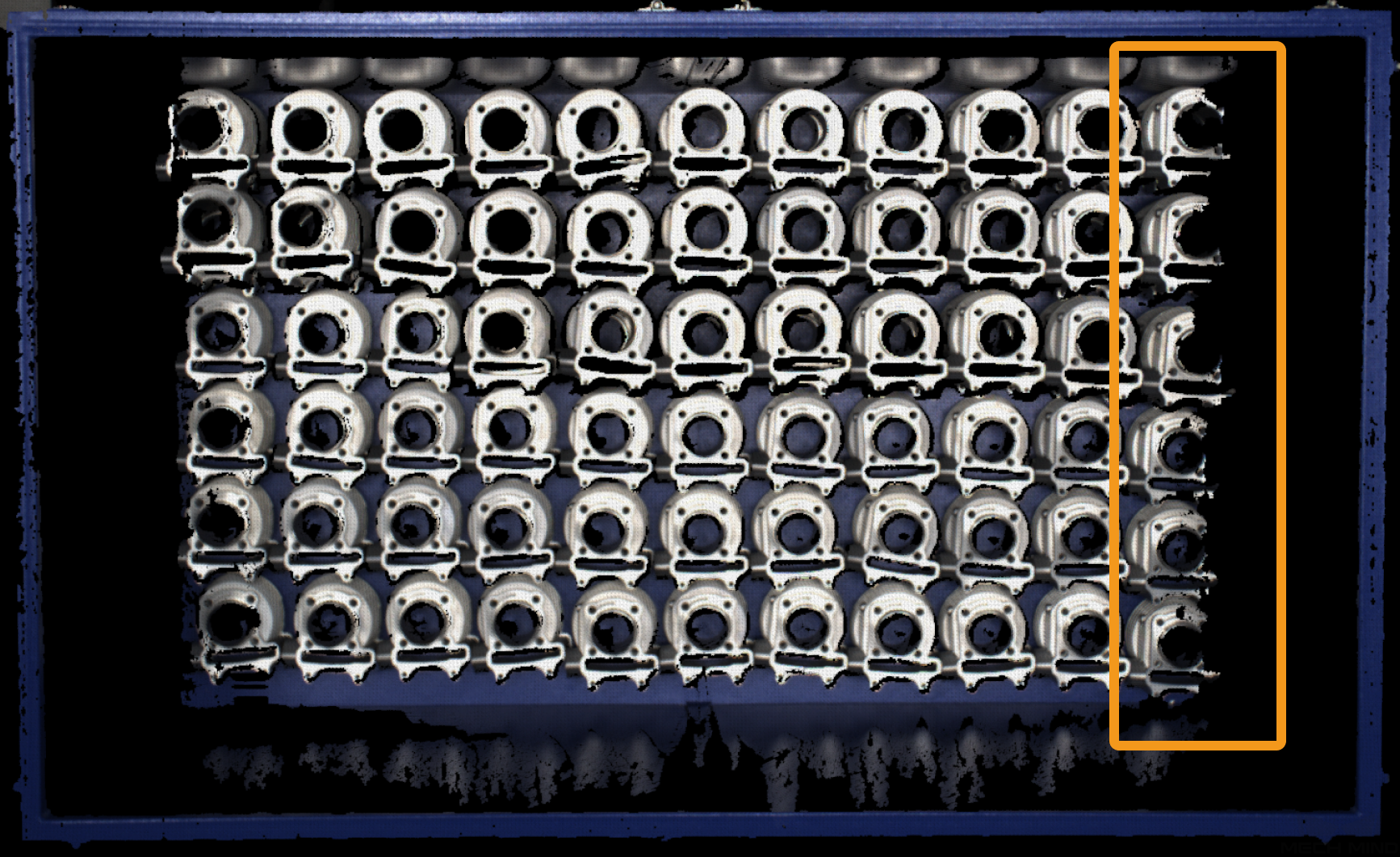
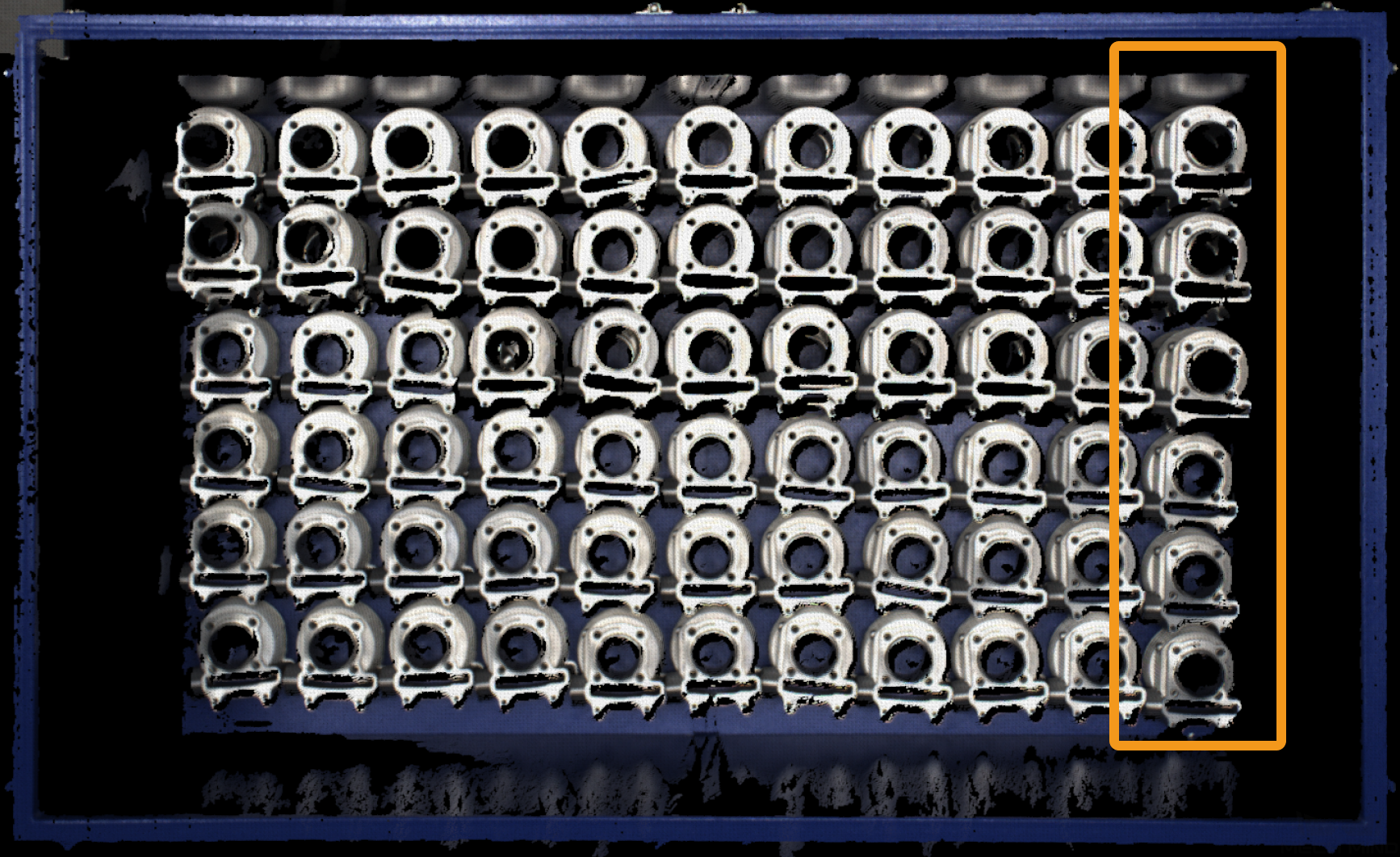
LSR L, LSR XL, LSR S 및 DEEP: Reflective 프린지 코딩 모드 성능 향상 + More complete 프로세싱 모드 제공
LSR L, LSR XL, LSR S 및 DEEP 카메라 펌웨어 버전을 2.4.0으로 업그레이드한 후, Reflective 프린지 코딩 모드 + More complete 프로세싱 모드를 사용하여 데이터를 획득할 때 빈 측벽 반사로 인한 뎁스 데이터 손실이 감소했습니다.
| 2.3.4 | 2.4.0 |
|---|---|
|
|
NANO ULTRA: 데이터 획득 속도 향상
NANO ULTRA 카메라 펌웨어 버전을 2.4.0으로 업그레이드한 후, 다른 프린지 코딩 모드를 사용하여 데이터를 캡처할 때, 뎁스 데이터의 총 획득 시간은 단축됩니다.
-
Fast: 약 100ms 단축됩니다.
-
Accurate: 약 150ms 단축됩니다.
-
Reflective: 약 500ms 단축됩니다.
NANO ULTRA, PRO S 및 PRO M: 2D 이미지와 뎁스 맵의 해상도 수정
NANO ULTRA, PRO S 및 PRO M 카메라 펌웨어 버전을 2.4.0으로 업그레이드한 후, 카메라 컨트롤러를 사용하여 2D 이미지와 뎁스 맵의 해상도를 수정할 수 있습니다. 낮은 해상도를 사용하면 카메라의 이미지 캡처 속도를 높일 수 있으며 사이클 타임에 대한 요구 사항이 높은 응용 시나리오에 더 적합합니다. 뿐만 아니라 포인트 클라우드 데이터의 크기를 줄일 수도 있습니다.
| 이 기능을 사용하려면 관리자 모드를 우선 선택하십시오. |
로그와 문제 해결 가이드 최적화
Mech-Eye SDK 2.4.0 버전에서는 로그 화면에 대해 최적화하는 동시에 Mech-Eye Viewer의 소프트웨어 로그를 새로 추가하며 보다 완전한 작업 기록을 보존합니다. 한편, 오류에 대한 문제 해결 가이드 매뉴얼이 제공되어 문제 원인 분석과 문제 해결이 더 쉬워졌습니다.
새로 업그레이드된 사용자 정의 기준 좌표계 도구
새로 업그레이드된 사용자 정의 기준 좌표계 도구를 통해 사용자 정의 기준 좌표계를 더욱 편리하게 설정할 수 있어 보다 다양한 응용 시나리오에 적용될 수 있습니다. 또한 사용자 정의 기준 좌표계에서의 포인트 클라우드를 저장하면 후속 처리해야 할 데이터 양을 줄일 수 있습니다.
2D Flash 노출 모드에 대한 획득 모드 선택 가능
|
다음 모델은 이 업데이트된 기능을 제공합니다. DEEP, LSR S, LSR L, NANO, NANO ULTRA, PRO XS, PRO S 및 PRO M. |
위 모델의 카메라의 펌웨어 버전을 2.4.0으로 업그레이드한 후, 2D 파라미터 범주 속의 노출 모드/2D 이미지(뎁스 소스) 노출 모드 파라미터가 Flash로 설정되면 Flash 획득 모드가 제공됩니다. 이 파라미터를 통해 보다 다양한 응용 시나리오에 적용될 수 있는 다른 획득 모드를 선택할 수 있습니다. 그 중에 Fast 모드를 사용하면 데이터 획득 속도가 빨라지고 사이클 타임도 최적화될 수 있습니다. Responsive 모드를 사용하면 Flash 노출 시간 파라미터를 조정하여 보다 고품질의 2D 이미지를 획득할 수 있습니다.
| 2D Flash 노출 모드에 관한 더 많은 설명은 2D Flash 노출 모드 내용을 참조하십시오. |
한 번의 클릭으로 Mech-Vision에서 즉시 사용 가능한 데이터 저장
데이터 저장 창에 Mech-Vision직접 사용할 수 있는 형식으로 데이터를 저정하는 옵션이 새로 추가됩니다. 이 옵션을 클릭한 후, Mech-Vision의 카메라에서 이미지를 캡처하기 스텝을 통해 저장된 데이터를 직접 읽어낼 수 있습니다.
데이터 전송 시간 확인 가능
카메라를 연결한 후 오른쪽의 획득 정보 탭에서 2D 이미지와 뎁스 데이터의 전송 시간을 확인할 수 있으며 인터넷 상태를 체크할 수 있습니다.
일부 카메라 모델 지원 종료
Mech-Eye SDK 2.4.0 버전에서는 더 이상 생산되지 않는 일부 카메라 모델에 대한 지원이 종료됩니다. 이러한 모델의 펌웨어는 2.4.0 버전 이상으로 업그레이드할 수 없지만, 2.3.4 버전 이하 펌웨어와 Mech-Eye SDK는 계속 사용할 수 있습니다.
Mech-Eye SDK 2.4.0 버전에서 다음 카메라 버전을 더 이상 지원할 수 없습니다.
| 모델 | 특징 |
|---|---|
Deep(V1) |
작동 전압은 12V이고, 이더넷 포트는 RJ45입니다. |
Pro L(V1) |
|
Pro L Enhanced(V1) |
|
Pro Max(V1) |
문제 복구
Mech-Eye SDK 2.4.0 버전에서는 다음 문제를 해결했습니다.
-
UHP-140: 사용자 유형이 마스터인 캡처 모드 파라미터는 사용자 유형을 초보자로 설정했을 때도 표시되는 문제를 해결했습니다.
-
가끔 발생하는 문제: 2D 이미지 획득 시간이 정상 범위를 넘어 상당히 길어졌습니다.
-
가끔 발생하는 문제: 장시간 계속해서 작동하면 카메라가 자동으로 연결 해제되고 다시 시작되는 문제를 해결했습니다.
-
데이터 획득 도중 네트워크 문제로 인해 카메라 연결이 끊어진 경우, 팝업 창을 닫은 후에도 Mech-Eye Viewer가 반응이 없는 문제를 해결했습니다.
-
카메라의 IP 주소를 연결된 컴퓨터 이더넷 포트와 일치하도록 수정했을 때, Mech-Eye Viewer에는 IP 주소 충돌을 알리지 않아 수정이 금지되지 않는 문제를 해결했습니다.
-
컴퓨터 네트워크 카드가 서로 다른 네트워크 세그먼트의 여러 IP 주소로 설정된 경우, Mech-Eye Viewer의 IP 구성 창의 컴퓨터 IP 구성 영역에는 네트워크 카드의 첫 번째 IP 주소가 표시되지만 카메라를 연결할 때는 마지막 IP 주소가 사용되는 문제를 해결했습니다.
-
내부 파라미터 도구에서 내부 파라미터 검사 중 특징 감지 결과의 제목과 내용이 일치하지 않는 문제를 해결했습니다.
-
동일한 컴퓨터의 여러 Mech-Eye Viewer 창에 여러 가상 장치가 별도로 로드된 경우, 한 가상 장치의 파라미터를 조정하면 다른 가상 장치에서 파라미터 설정 동기화 알림이 나타나는 문제를 해결했습니다.
-
2D 카메라 확인 및 구성 도구에서 긴 장치 버전이 완전하게 표시될 수 없는 문제를 해결했습니다.
-
가끔 발생하는 문제: 획득 정보 페널과 로그에 기록된 획득 시간이 마이너스로 나타나는 문제를 해결했습니다.
Mech-Eye API
LSR L, LSR XL, LSR S 및 DEEP: Reflective 프린지 코딩 모드 + MoreComplete 프로세싱 모드 성능 최적화
LSR L, LSR XL, LSR S 및 DEEP 카메라 펌웨어를 2.4.0 버전으로 업그레이드한 후, LaserFringeCodingMode(프린지 코딩 모드) 파라미터의 Reflective 옵션 및 LaserProcessingMode(프로세싱 모드) 파라미터의 MoreComplete 옵션을 사용하여 데이터를 획득할 때, 빈 측벽 반사로 인한 뎁스 데이터 손실이 감소했습니다.
| 2.3.4 | 2.4.0 |
|---|---|
|
|
NANO ULTRA: 데이터 획득 속도 향상
NANO ULTRA 카메라 펌웨어 버전을 2.4.0으로 업그레이드한 후, 다른 프린지 코딩 모드를 사용하여 데이터를 캡처할 때, 뎁스 데이터의 총 획득 시간은 단축됩니다.
-
Fast: 약 100ms 단축됩니다.
-
Accurate: 약 150ms 단축됩니다.
-
Reflective: 약 500ms 단축됩니다.
Camera Event를 통한 사이클 타임 단축
Camera Event에 대한 콜백 함수를 등록함으로써 클라이언트 프로그램은 카메라가 구조형 광을 투사하고 3D 데이터를 획득하는 것을 완료했는지 자동으로 감지할 수 있습니다. 투사와 데이터 획득이 완료되면 로봇이 움직이기 시작하고, 로봇이 움직이는 동안 카메라는 이후의 계산과 데이터 전송을 마칠 수 있어 사이클 타임이 단축됩니다.
Camera Event에 대한 콜백 함수를 등록 및 등록 해제하는 방법에 대해서는 관련 샘플 RegisterCameraEvent(C++ 및 C#)/register_camera_event(Python)을 참조하세요.
|
관련 예제 프로그램은 GitHub에서 다운받을 수 있습니다. 예제 프로그램의 사용법은 예제 프로그램 사용 가이드 내용을 참조하십시오. |
사용자 정의 기준 좌표계
Mech-Eye Viewer의 사용자 정의 기준 좌표계 도구를 사용하여 사용자 정의 기준 좌표계를 설정한 후 새 메서드를 호출하여 카메라 기준 좌표계와 사용자 정의 기준 좌표계의 포인트 클라우드에서 사용자 정의 기준 좌표계의 변환 파라미터를 가져올 수 있습니다.
구체적인 메소드에 대해서는 관련 샘플 TransformPointCloud(C++ 및 C#)/transform_point_cloud(Python)을 참조하세요.
|
관련 예제 프로그램은 GitHub에서 다운받을 수 있습니다. 예제 프로그램의 사용법은 예제 프로그램 사용 가이드 내용을 참조하십시오. |
2D Flash 노출 모드에 대한 획득 모드 선택 가능
|
다음 모델은 이 업데이트된 기능을 제공합니다. DEEP, LSR S, LSR L, NANO, NANO ULTRA, PRO XS, PRO S 및 PRO M. |
위 모델의 카메라 펌웨어 버전을 2.4.0으로 업그레이드한 후, Scan2DExposureMode(노출 모드)/Scan2DPatternRoleExposureMode(2D 이미지(뎁스 소스) 노출 모드) 파라미터를 Flash로 설정하면 Scan2DFlashAcquisitionMode(Flash 획득 모드) 파라미터가 새로 추가됩니다. 이 파라미터를 통해 보다 다양한 응용 시나리오에 적용될 수 있는 다른 획득 모드를 선택할 수 있습니다. 그 중에 Fast 모드를 사용하면 데이터 획득 속도가 빨라지고 사이클 타임도 최적화될 수 있습니다. Responsive 모드를 사용하면Scan2DFlashExposureTime(Flash 노출 시간) 파라미터를 조정하여 보다 고품질의 2D 이미지를 획득할 수 있습니다.
| 2D Flash 노출 모드에 관한 더 많은 설명은 2D Flash 노출 모드 내용을 참조하십시오. |
Jet 색 구성표를 사용하여 뎁스 맵 렌더링
Mech-Eye API 2.4.0 버전에서는 jet 색 구성표를 사용하여 뎁스 맵을 렌더링하는 방법을 보여주는 새로운 샘플 RenderDepthMap(C++ 및 C#)/render_depth_map(Python)을 제공하며, 뎁스 값이 jet 색 구성표의 다양한 색상으로 표시됩니다.
|
관련 예제 프로그램은 GitHub에서 다운받을 수 있습니다. 예제 프로그램의 사용법은 예제 프로그램 사용 가이드 내용을 참조하십시오. |
ROS 인터페이스 제공
Mech-Eye SDK에서는 ROS 인터페이스를 새로 제공합니다. ROS를 통해 카메라와 로봇 간의 통신을 실현할 수 있습니다.
ROS 인터페이스는 GitHub을 통해 획득할 수 있습니다.
|
일부 카메라 모델 지원 종료
Mech-Eye SDK 2.4.0 버전에서는 더 이상 생산되지 않는 일부 카메라 모델에 대한 지원이 종료됩니다. 이러한 모델의 펌웨어는 2.4.0 버전 이상으로 업그레이드할 수 없지만, 2.3.4 버전 이하 펌웨어와 Mech-Eye SDK는 계속 사용할 수 있습니다.
Mech-Eye SDK 2.4.0 버전에서 다음 카메라 버전을 더 이상 지원할 수 없습니다.
| 모델 | 특징 |
|---|---|
Deep(V1) |
작동 전압은 12V이고, 이더넷 포트는 RJ45입니다. |
Pro L(V1) |
|
Pro L Enhanced(V1) |
|
Pro Max(V1) |
GenICam 인터페이스
LSR L, LSR XL, LSR S 및 DEEP: Reflective 프린지 코딩 모드 + MoreComplete 프로세싱 모드 성능 최적화
LSR L, LSR XL, LSR S 및 DEEP 카메라 펌웨어를 2.4.0 버전으로 업그레이드한 후, LaserFringeCodingMode(프린지 코딩 모드) 파라미터의 Reflective 옵션 및 LaserProcessingMode(프로세싱 모드) 파라미터의 MoreComplete 옵션을 사용하여 데이터를 획득할 때, 빈 측벽 반사로 인한 뎁스 데이터 손실이 감소했습니다.
| 2.3.4 | 2.4.0 |
|---|---|
|
|
NANO ULTRA: 데이터 획득 속도 향상
NANO ULTRA 카메라 펌웨어 버전을 2.4.0으로 업그레이드한 후, 다른 프린지 코딩 모드를 사용하여 데이터를 캡처할 때, 뎁스 데이터의 총 획득 시간은 단축됩니다.
-
Fast: 약 100ms 단축됩니다.
-
Accurate: 약 150ms 단축됩니다.
-
Reflective: 약 500ms 단축됩니다.
2D Flash 노출 모드에 대한 획득 모드 선택 가능
|
다음 모델은 이 업데이트된 기능을 제공합니다. DEEP, LSR S, LSR L, NANO, NANO ULTRA, PRO XS, PRO S 및 PRO M. |
위 모델의 카메라 펌웨어 버전을 2.4.0으로 업그레이드한 후, Scan2DExposureMode(노출 모드)/Scan2DPatternRoleExposureMode(2D 이미지(뎁스 소스) 노출 모드) 파라미터를 Flash로 설정하면 Scan2DFlashAcquisitionMode(Flash 획득 모드) 파라미터가 새로 추가됩니다. 이 파라미터를 통해 보다 다양한 응용 시나리오에 적용될 수 있는 다른 획득 모드를 선택할 수 있습니다. 그 중에 Fast 모드를 사용하면 데이터 획득 속도가 빨라지고 사이클 타임도 최적화될 수 있습니다. Responsive 모드를 사용하면Scan2DFlashExposureTime(Flash 노출 시간) 파라미터를 조정하여 보다 고품질의 2D 이미지를 획득할 수 있습니다.
| 2D Flash 노출 모드에 관한 더 많은 설명은 2D Flash 노출 모드 내용을 참조하십시오. |
일부 카메라 모델 지원 종료
Mech-Eye SDK 2.4.0 버전에서는 더 이상 생산되지 않는 일부 카메라 모델에 대한 지원이 종료됩니다. 이러한 모델의 펌웨어는 2.4.0 버전 이상으로 업그레이드할 수 없지만, 2.3.4 버전 이하 펌웨어와 Mech-Eye SDK는 계속 사용할 수 있습니다.
Mech-Eye SDK 2.4.0 버전에서 다음 카메라 버전을 더 이상 지원할 수 없습니다.
| 모델 | 특징 |
|---|---|
Deep(V1) |
작동 전압은 12V이고, 이더넷 포트는 RJ45입니다. |
Pro L(V1) |
|
Pro L Enhanced(V1) |
|
Pro Max(V1) |
문제 복구
Mech-Eye SDK 2.4.0 버전에서는 다음 문제를 해결했습니다.
-
UHP-140: 사용자 유형이 마스터인 캡처 모드 파라미터는 사용자 유형을 초보자로 설정했을 때도 표시되는 문제를 해결했습니다.
-
가끔 발생하는 문제: 2D 이미지 획득 시간이 정상 범위를 넘어 상당히 길어졌습니다.
-
가끔 발생하는 문제: 장시간 계속해서 작동하면 카메라가 자동으로 연결 해제되고 다시 시작되는 문제를 해결했습니다.
-
데이터 획득 라운드 사이에 대기시간 없이 연속적으로 데이터를 획득할 경우, 타임아웃 오류가 자주 발생하는 문제를 해결했습니다.
-
데이터 획득 중에 동일한 로컬 네트워크에 있는 다른 카메라의 IP 주소가 다른 GenICam 클라이언트에 의해 수정된 경우, 현재 연결된 카메라의 데이터 획득은 오류로 인해 종료되는 문제를 해결했습니다.