DEEP
물리적 사양
모델 |
DEEP |
|---|---|
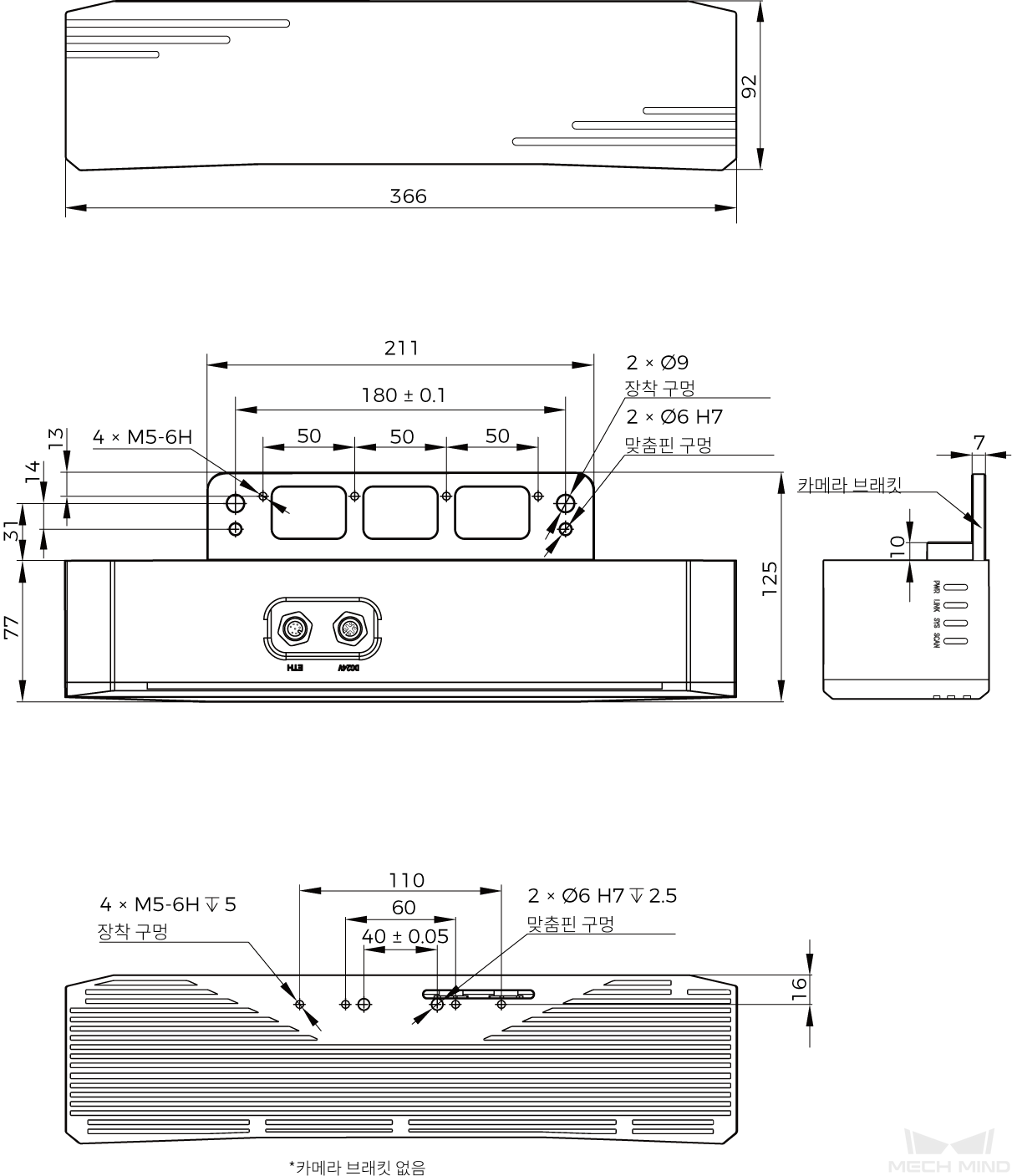
치수 |
366 × 77 × 92mm |
무게 |
2.4kg |
기선 길이 |
300mm |
광원 |
적색 레이저(638nm, Class 2) |
작업 온도 |
-10~45°C |
작업 습도 |
0–85%RH, 비응축 |
보존 온도 |
-20~60℃ |
통신 인터페이스 |
기가비트 이더넷 |
입력 |
24V DC,3.75A |
출력 |
유휴 상태: 22 W 평균: 30W 피크: 60W |
보호 등급(1) |
IP65 |
냉각 방식 |
Passive |
장착 표면의 평탄도 공차(2) |
± 0.05mm |
진동 내구성(3) |
X, Y, Z축을 따라 사인파 진동, 10–57Hz, 1.5mm 피크 대 피크 값, 축당 3시간 |
충격 내성(4) |
X, Y, Z축의 양, 음 방향으로 반 사인 충격 펄스, 147m/s2(15g), 11ms, 방향당 3회 충격, 총 18회 충격 |
(1) IEC 60529 표준에 근거하여 태스트한 결과입니다. 그중에 6은 방진 등급이고 5는 방수 등급입니다.
(2) 카메라를 장착하는 데 사용되는 표면의 평탄도는 이 요구 사항을 충족해야 합니다.
(3) IEC 60068-2-6 표준에 근거하여 태스트한 결과입니다.
(4) IEC 60068-2-27 표준에 근거하여 태스트한 결과입니다.
성능 사양
작업 거리 |
1200~3500mm |
|---|---|
추천 작업 거리 |
1800~3200mm |
초점 거리(1) |
2500mm |
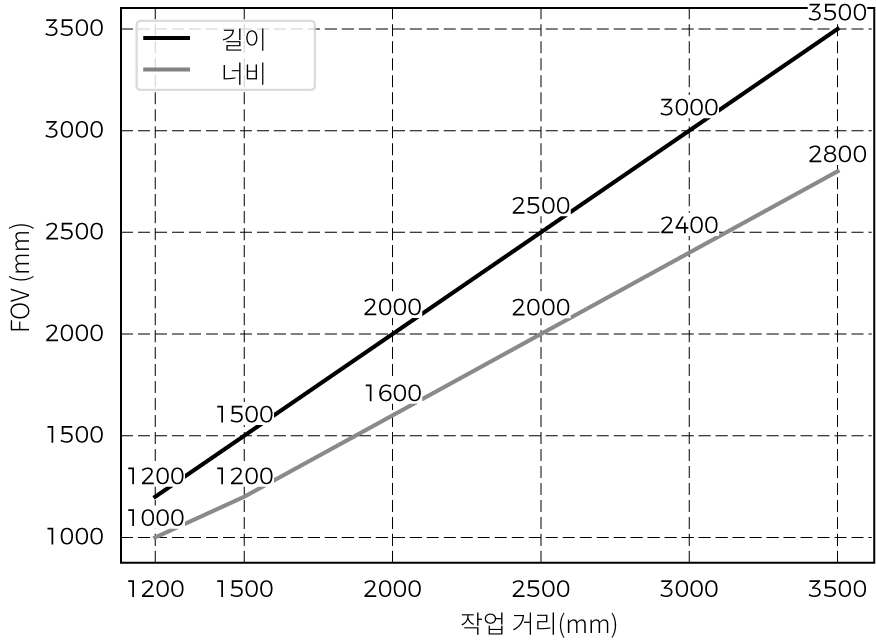
근거리 FOV |
1200 × 1000mm @ 1.2m |
원거리 FOV |
3500 × 2800mm @ 3.5m |
뎁스 맵 해상도(2) |
2048 × 1536 |
RGB 해상도(3) |
2000 × 1500 |
일반적인 캡처 시간(4),(5) |
0.5~0.9s |
권장 예열 시간(4),(6) |
30min |
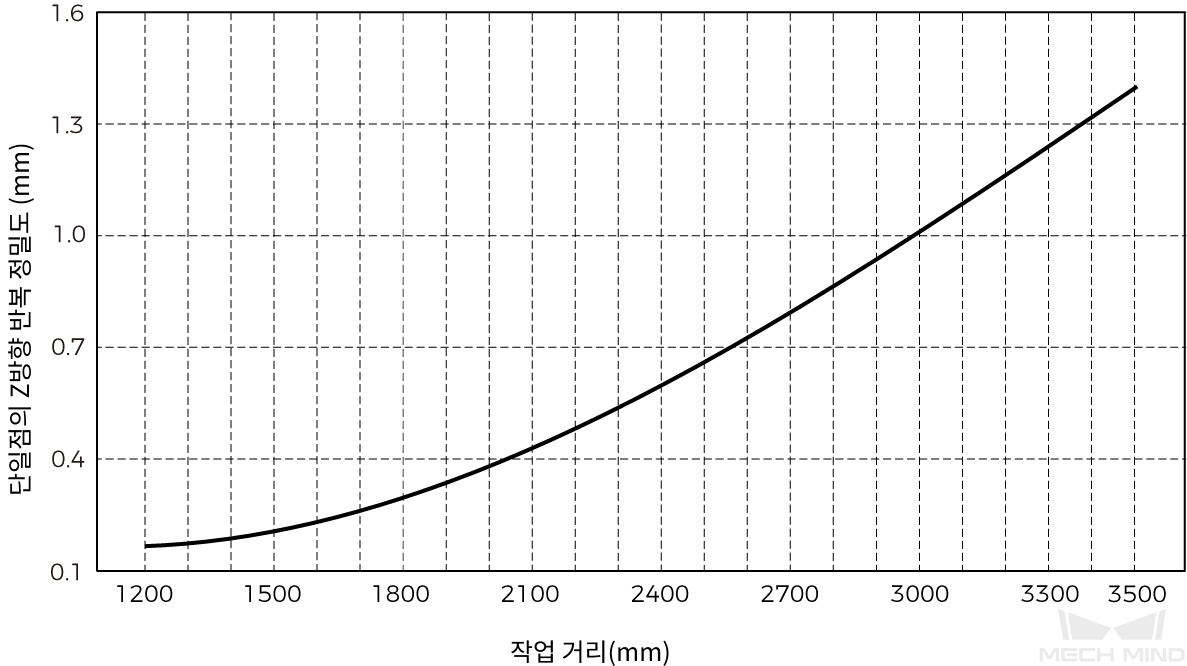
단일점의 Z방향 반복 정밀도(1σ)(4),(7) |
1.0mm @ 3.0m |
VDI/VDE 측정 정밀도(4),(8) |
3.0mm @ 3.0m |
(1) 제품 내부 2D 카메라의 물체 초점 거리입니다.
(2) Mech-Eye Viewer를 통해 1024 × 768로 수정할 수 있습니다.
(3) RGB 이미지는 Mech-Eye Viewer 중의 2D 이미지(텍스처)를 가리킵니다.
(4) 이 테스트는 별도의 언급이 없는 한, 표준 테스트 조건에서 수행되었습니다.
(5) Fast 및 Accurate프린지 코딩 모드에서 Mech-Eye Viewer를 사용하여 데이터를 획득하는 데 걸리는 시간 범위입니다.
(6) 나열된 값의 데이터 정확성을 보장하기 위해 필요한 권장 예열 시간입니다. 예열 방법은 사용자 매뉴얼 내용을 참조하세요(데이터 획득 간격은 10초입니다). 실제 데이터 획득 간격, 주변 온도, 방열 조건에 따라 예열 시간을 조정하세요.
(7) 대상 물체 각 포인트의 깊이를 100번 측정한 값의 1배 표준 편차를 계산한 후, 모든 1배 표준 편차의 중앙값을 구합니다. 대상 물체는 표면이 거친 흰색 세라믹 판입니다. 포인트 클라우드 후처리 파라미터가 모두 Off로 설정됩니다.
(8) VDI/VDE 2634 Part 2 표준을 기준으로 합니다.
인증
레이저 제품 안전
레이저 분류는 FDA(CDRH)의 Laser Notice No. 56 요구 사항에 따라 IEC 60825-1:2014를 기반으로 구현됩니다.
모델 |
파장 |
최대 출력 |
레이저 등급 |
|---|---|---|---|
DEEP |
638nm |
2.46mW |
Class 2 |
CE
메크마인드로보틱스[Mech-Mind Robotics Technologies Co., Ltd.]는 [DEEP] 카메라 모델이 전자기파 적합성 지침 EMC 2014/30/EU를 준수함을 선언합니다.
EU 적합성 선언의 전문은 https://downloads.mech-mind.com/?tab=tab-eu-dec에서 확인할 수 있습니다.
표준 테스트 조건
작업 거리 |
1800~3200mm |
||
|---|---|---|---|
주변 온도 |
15~30℃ |
||
주변 습도 |
0–85%RH, 비응축 |
||
주변 조명 강도 |
200~1000lx |
||
카메라 파라미터 설정(1) |
8ms |
||
고정 노출(노출 시간: 20ms) |
|||
Flash(Flash 획득 모드: Fast) |
|||
0dB |
|||
100% |
|||
Accurate |
|||
Normal |
|||
Normal |
|||
Normal |
|||
테스트 영역(2) |
길이: FOV 길이의 90% 너비: FOV 너비의 90% 위치: FOV의 중심 |
||
뎁스 맵 해상도 |
2048 × 1536 |
||
(1) 나열되지 않은 파라미터는 기본값으로 설정됩니다.
(2) 테스트 데이터는 모두 이 영역에서 가져온 것입니다.