Mech-Eye SDK 2.5.2 릴리스 노트
Mech-Eye SDK 2.5.2 버전 업데이트 시 추가된 기능, 개선사항, 버그 수정을 소개합니다.
Mech-Eye Viewer
예열 도구 제공
Mech-Eye Viewer 2.5.2 버전에서는 예열 도구가 새롭게 추가되었습니다. 이 도구를 사용하면 데이터를 수집하기 전에 장치를 미리 예열하여 더 높은 정확도의 데이터를 확보할 수 있습니다.
NANO ULTRA-GL : 'Reflective' 프린지 코딩 모드에 새로운 옵션 추가
Faster 옵션은 이전 버전과 동일한 속도와 효과를 유지합니다. More complete 옵션을 선택하면 뎁스 데이터가 보다 정밀해져, 뎁스 맵과 포인트 클라우드의 완전성을 높일 수 있습니다. 다중 반사가 일어날 수 있는 트레이와 같이 복잡한 반사 환경에서는, 데이터 품질 확보를 위해 More complete 옵션을 사용하는 것이 좋습니다.
NANO ULTRA-GL : 'Reflective' 프린지 코딩 모드에서 갭 채우기 지원
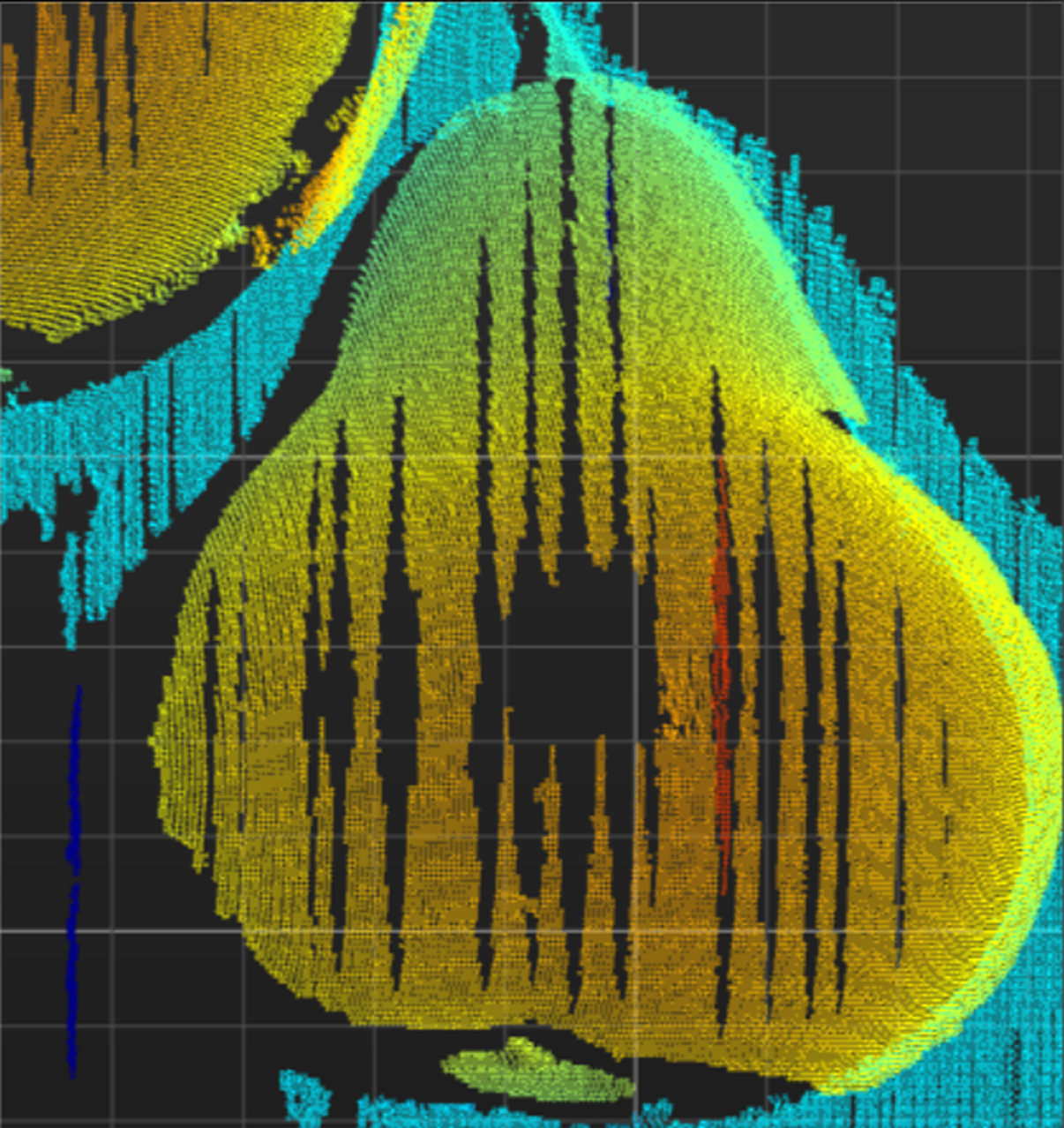
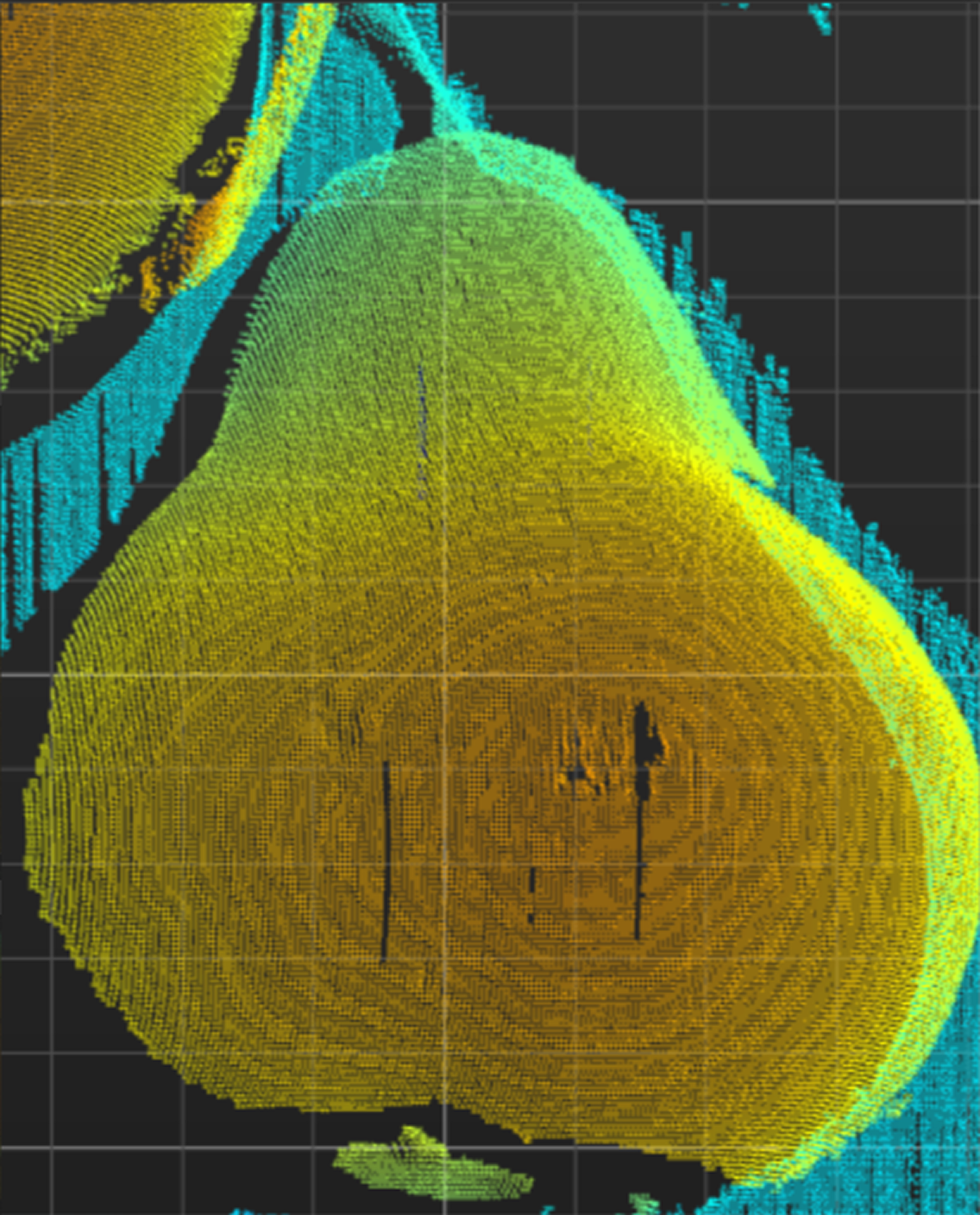
프린지 코딩 모드의 Reflective 옵션을 선택하면, 새롭게갭 채우기 활성화와 갭 크기 파라미터가 추가됩니다. 이를 통해 포인트 클라우드의 간격을 채워 물체 표면의 특징을 보다 완전하게 표현할 수 있습니다. 자세한 내용은 파라미터 설명 섹션을 참조하세요.
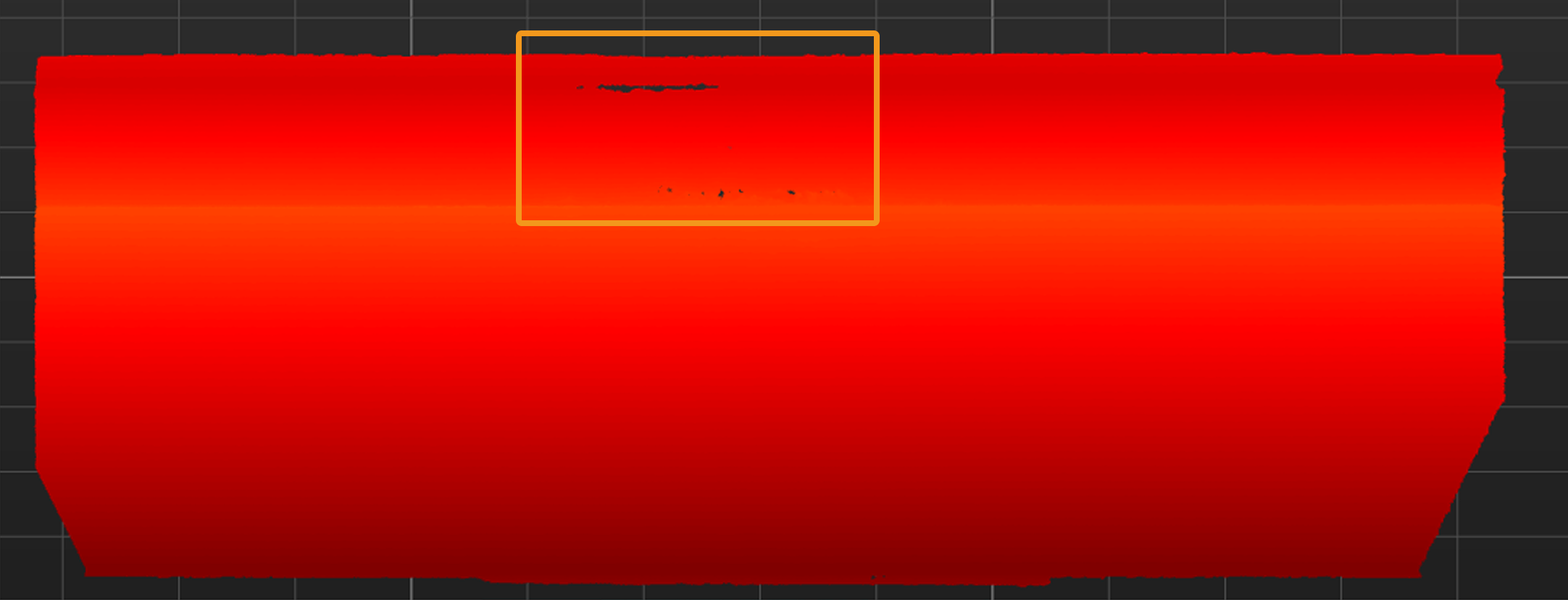
| 대상 물체 | 갭 채우기 사용 전 | 갭 채우기 사용 후 |
|---|---|---|
|
|
|
PRO S-GL 및 PRO M-GL : 'Reflective' 프린지 코딩 모드에서 2회 노출 지원
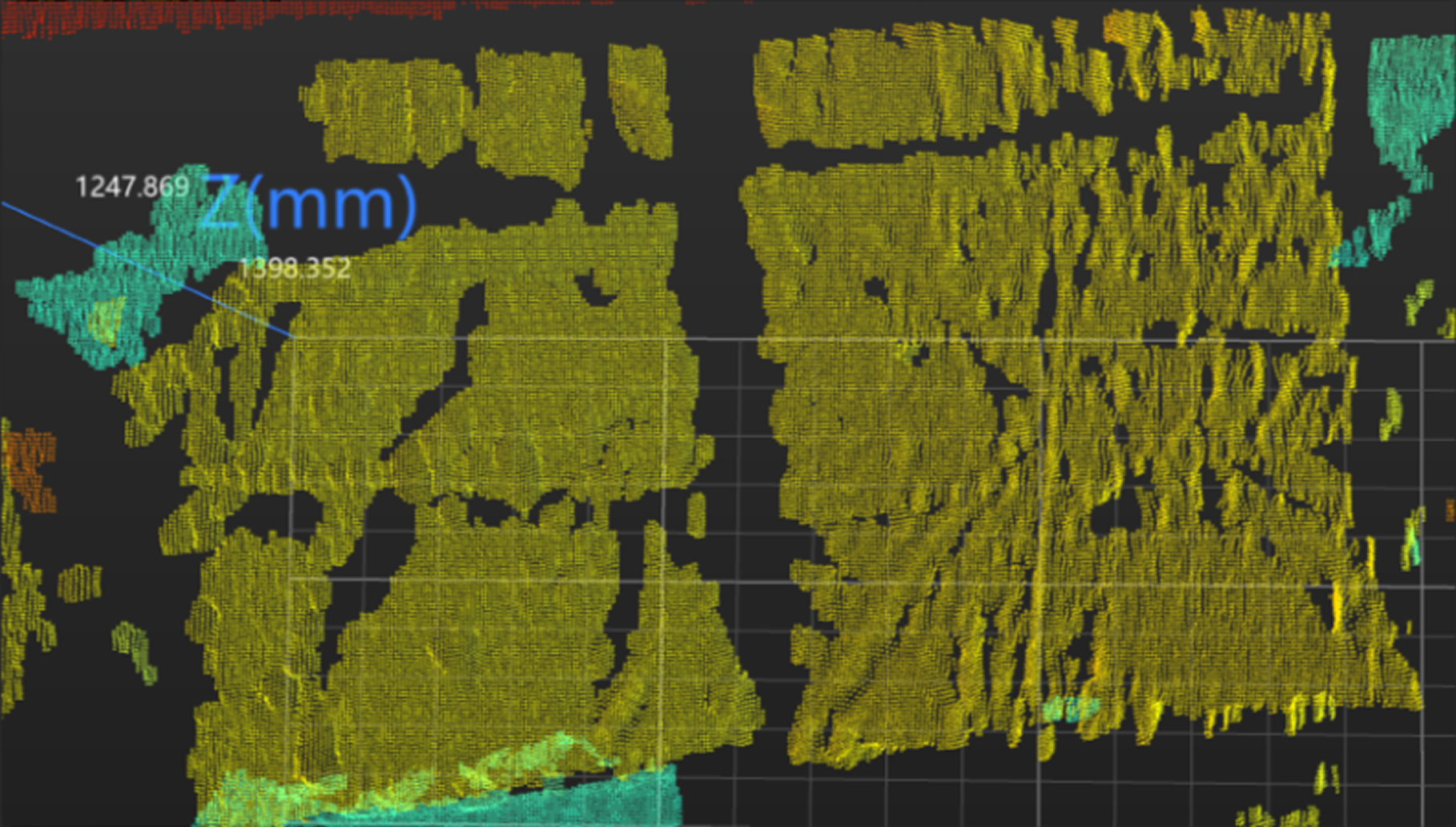
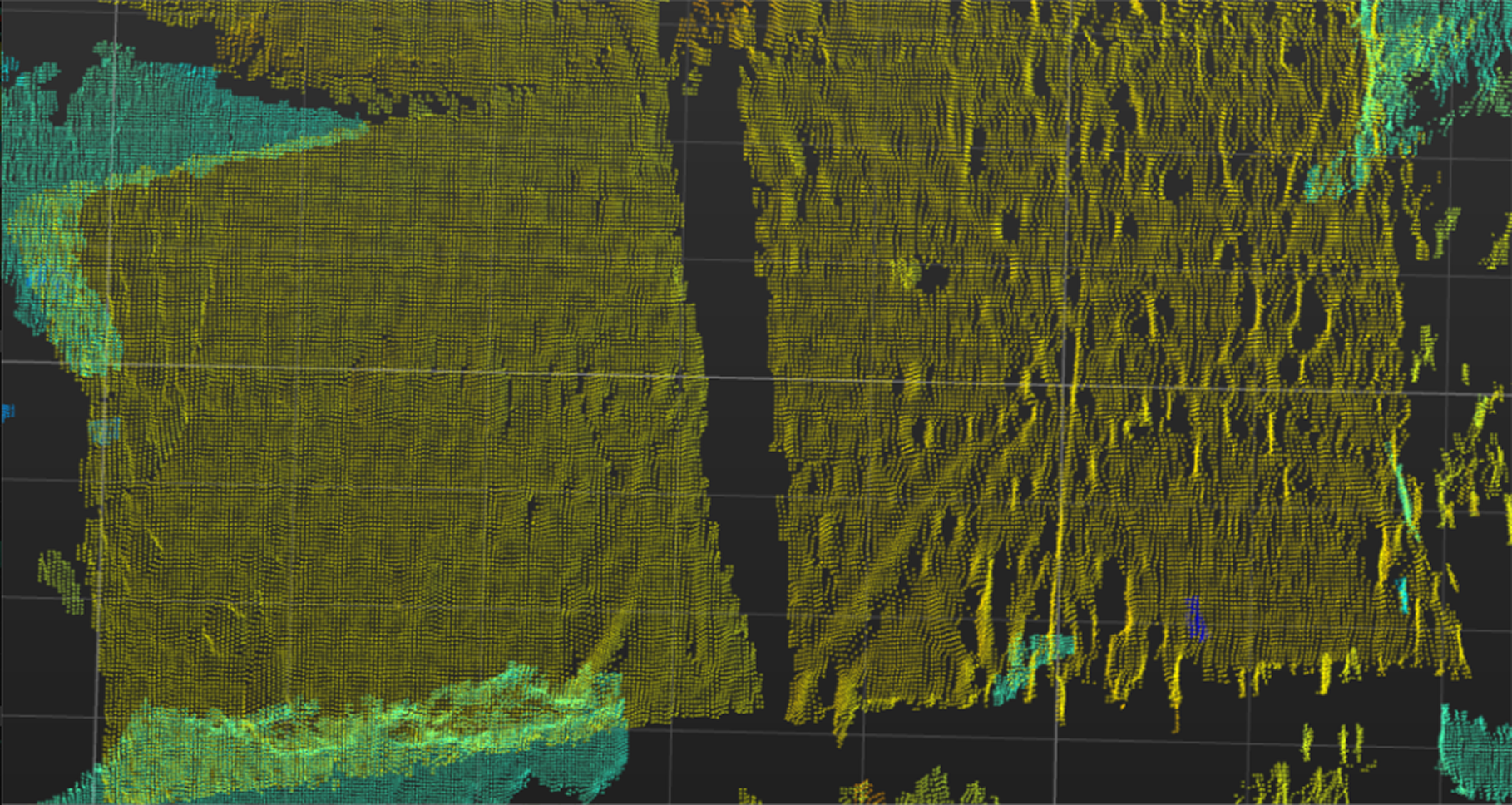
프린지 코딩 모드에서 Reflective 옵션을 선택하면, 최대 2회까지 노출을 설정할 수 있습니다. 다른 조건이 일치하고 노출 시간만 다른 경우, 캡처된 포인트 클라우드는 다음과 같습니다.
| 5ms | 5ms + 20ms |
|---|---|
|
|

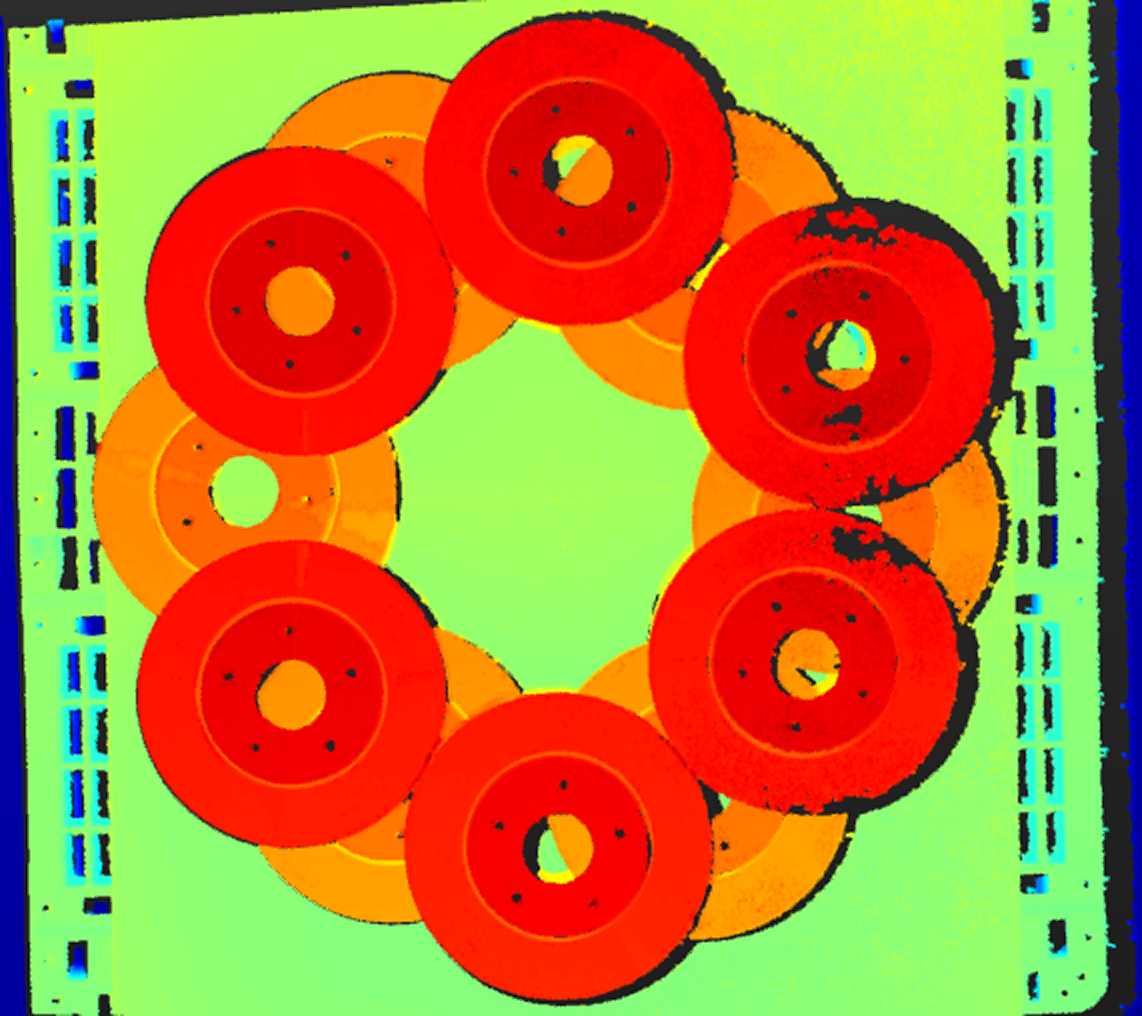
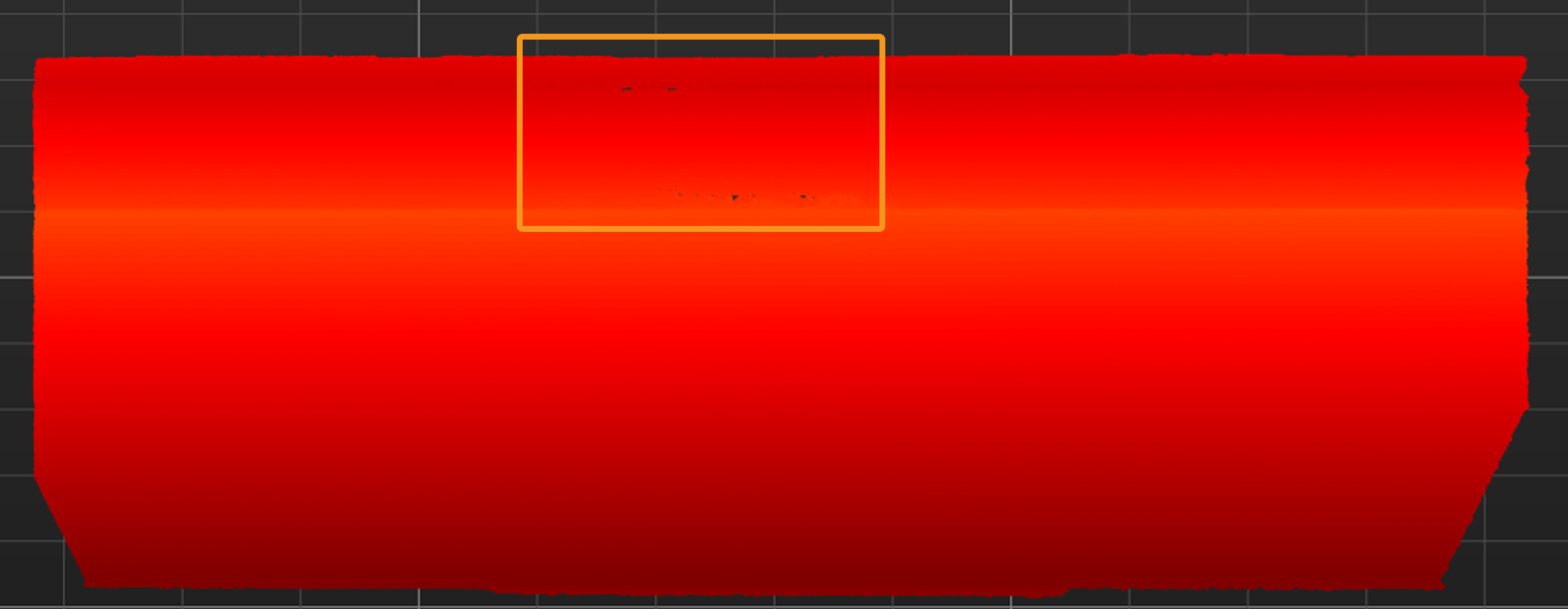
PRO S-GL 및 PRO M-GL 컬러 카메라 : 데이터 품질 향상
PRO S-GL 및 PRO M-GL 컬러 카메라 프린지 코딩 모드에서 Fast, Accurate, Reflective 옵션을 선택하면 획득한 데이터의 품질이 향상됩니다. 모든 조건이 동일한 상태에서, 서로 다른 프린지 코딩 모드 값으로 캡처한 포인트 클라우드:
| 2.5.0 | 2.5.2 | |
|---|---|---|
Accurate |
|
|
Reflective |
|
|
데이터 연속 저장 지원
데이터 저장 기능이 완전히 업그레이드되었습니다. 데이터를 한 번 수집한 후, 수동 저장을 선택하여 수집된 데이터를 로컬에 저장할 수 있습니다. 데이터를 연속 저장할 경우, 자동 저장을 선택하면 소프트웨어가 수집된 데이터를 매번 자동으로 저장합니다.
포인트 클라우드 ROI 설정 지원
포인트 클라우드 표시 화면에서 ![]() 을 클릭하면 포인트 클라우드 ROI 화면으로 이동합니다. 포인트 클라우드 ROI를 설정하면, 특정 영역의 포인트 클라우드를 확인할 수 있습니다.
을 클릭하면 포인트 클라우드 ROI 화면으로 이동합니다. 포인트 클라우드 ROI를 설정하면, 특정 영역의 포인트 클라우드를 확인할 수 있습니다.
클라이언트 간 파라미터 그룹 상태 동기화 최적화
다른 클라이언트에서 파라미터를 변경하거나 파라미터 그룹을 수정하면, 현재 클라이언트가 자동으로 동기화되어 모든 클라이언트의 작업 일관성을 보장합니다.
일부 카메라 모델 지원 종료
Mech-Eye SDK 2.5.2는 PRO XS-GL 모델 사용을 지원하지 않습니다. 해당 모델은 펌웨어를 2.5.2 이상으로 업데이트할 수 없으며, 기존 2.5.2 이하 버전 펌웨어 및 Mech-Eye SDK는 계속 사용 가능합니다.
버그 수정
Mech-Eye SDK 2.5.2 버전에서는 다음과 같은 오류가 개선되었습니다.
-
데이터 표시 영역에서 이미지 크기를 조정하거나 이동한 후, 다른 데이터 유형 화면으로 전환한 뒤 다시 해당 이미지로 돌아오면 이전에 적용한 크기 조정과 위치 이동이 유지되지 않는 문제를 수정하였습니다.
-
뎁스 맵 그리드를 3 × 3으로 설정한 후 Mech-Eye Viewer를 종료하면, 이후 Mech-Eye Viewer로 카메라 재연결 시 해당 설정이 초기화되는 문제를 해결했습니다.
-
IPC가 오프라인 상태일 경우, 가상 장치에 연결할 수 없는 문제를 수정하였습니다.
-
우발적인 오류 : 마우스 왼쪽 버튼으로 포인트 클라우드를 회전하거나, 포인트 클라우드 표시 기능을 사용 시, 회전 중심이 포인트 클라우드의 중심과 일치하지 않는 문제를 수정하였습니다.
Mech-Eye API
예열 샘플 프로그램 제공
Mech-Eye API 2.5.2 버전에서는 아래 샘플 프로젝트가 새로 추가되어 장치 워밍업(예열)에 사용됩니다.
C, C++, C# |
WarmUp |
|---|---|
Python |
warm_up |
|
관련 샘플 프로그램은 GitHub에서 다운로드할 수 있습니다. 예제 프로그램의 사용 방법은 샘플 프로그램 사용 가이드 내용을 참조하세요. |
NANO ULTRA-GL : 'Reflective' 프린지 코딩 모드에 새로운 옵션 추가
ProjectorFringeCodingMode(프린지 코딩 모드) 파라미터의 Reflective 옵션을 선택하면, 다양한 데이터 처리 모드를 지원하는 ProcessingMode(프로세싱 모드) 파라미터가 새롭게 추가됩니다.
Faster 옵션은 이전 버전과 동일한 속도와 효과를 제공하며, MoreComplete 옵션은 뎁스 데이터를 보다 완전하게 만들어 뎁스 맵과 포인트 클라우드 품질을 높일 수 있습니다. 다중 반사가 일어날 수 있는 트레이와 같이 복잡한 반사 환경에서는, 데이터 품질 확보를 위해 MoreComplete 옵션을 사용하는 것이 좋습니다.
NANO ULTRA-GL : 'Reflective' 프린지 코딩 모드에서 갭 채우기 지원
ProjectorFringeCodingMode(프린지 코딩 모드)의 Reflective 옵션을 사용하면, EnableGapFilling(갭 채우기 활성화) 및 GapSize(갭 크기) 파라미터가 새로 추가됩니다. 이 파라미터들은 포인트 클라우드의 간격을 보완하여 물체 표면 특징을 더욱 완전하게 표현할 수 있도록 합니다. 자세한 내용은 파라미터 설명 섹션을 참조하세요.
| 대상 물체 | 갭 채우기 사용 전 | 갭 채우기 사용 후 |
|---|---|---|
|
|
|
PRO S-GL 및 PRO M-GL : 'Reflective' 프린지 코딩 모드에서 2회 노출 지원
프린지 코딩 모드에서 Reflective 옵션을 선택하면, 최대 2회까지 노출을 설정할 수 있습니다. 다른 조건이 일치하고 노출 시간만 다른 경우, 캡처된 포인트 클라우드는 다음과 같습니다.
| 5ms | 5ms + 20ms |
|---|---|
|
|
PRO S-GL 및 PRO M-GL 컬러 카메라 : 데이터 품질 향상
PRO S-GL 및 PRO M-GL 컬러 카메라의 ProjectorFringeCodingMode (프린지 코딩 모드)에서 Fast, Accurate, Reflective 옵션을 사용하면 획득한 데이터의 품질이 향상됩니다. 모든 조건이 동일한 상태에서, 서로 다른 프린지 코딩 모드 값으로 캡처한 포인트 클라우드:
| 2.5.0 | 2.5.2 | |
|---|---|---|
Accurate |
|
|
Reflective |
|
|
일부 카메라 모델 지원 종료
Mech-Eye SDK 2.5.2는 PRO XS-GL 모델 사용을 지원하지 않습니다. 해당 모델은 펌웨어를 2.5.2 이상으로 업데이트할 수 없으며, 기존 2.5.2 이하 버전 펌웨어 및 Mech-Eye SDK는 계속 사용 가능합니다.
버그 수정
Mech-Eye SDK 2.5.2 버전에서는 다음과 같은 오류가 개선되었습니다.
-
뎁스 맵 분석기 도구에서 선을 그린 후 대상 물체를 변경하더라도, 도구 창 오른쪽에 표시되는 뎁스 데이터는 갱신되지 않습니다.
-
뎁스 범위 설정 창에서 깊이 범위를 조정한 후 취소를 클릭했는데, 메인 화면의 뎁스 범위 파라미터 범주의 하한 및 상한 값이 변경됩니다.
-
다음 샘플 프로젝트를 실행하면 장치 연결이 끊기고 데이터 수집이 실패하지만, 데이터는 계속 저장됩니다.
C++ 및 C#
CapturePeriodically
Python
capture_periodically
GenICam Interface
NANO ULTRA-GL : 'Reflective' 프린지 코딩 모드에 새로운 옵션 추가
ProjectorFringeCodingMode(프린지 코딩 모드) 파라미터의 Reflective 옵션을 선택하면, 다양한 데이터 처리 모드를 지원하는 ProcessingMode(프로세싱 모드) 파라미터가 새롭게 추가됩니다.
Faster 옵션은 이전 버전과 동일한 속도와 효과를 제공하며, MoreComplete 옵션은 뎁스 데이터를 보다 완전하게 만들어 뎁스 맵과 포인트 클라우드 품질을 높일 수 있습니다. 다중 반사가 일어날 수 있는 트레이와 같이 복잡한 반사 환경에서는, 데이터 품질 확보를 위해 MoreComplete 옵션을 사용하는 것이 좋습니다.
NANO ULTRA-GL : 'Reflective' 프린지 코딩 모드에서 갭 채우기 지원
ProjectorFringeCodingMode(프린지 코딩 모드)의 Reflective 옵션을 사용하면, EnableGapFilling(갭 채우기 활성화) 및 GapSize(갭 크기) 파라미터가 새로 추가됩니다. 이 파라미터들은 포인트 클라우드의 간격을 보완하여 물체 표면 특징을 더욱 완전하게 표현할 수 있도록 합니다. 자세한 내용은 파라미터 설명 섹션을 참조하세요.
| 대상 물체 | 갭 채우기 사용 전 | 갭 채우기 사용 후 |
|---|---|---|
|
|
|
PRO S-GL 및 PRO M-GL : 'Reflective' 프린지 코딩 모드에서 2회 노출 지원
프린지 코딩 모드에서 Reflective 옵션을 선택하면, 최대 2회까지 노출을 설정할 수 있습니다. 다른 조건이 일치하고 노출 시간만 다른 경우, 캡처된 포인트 클라우드는 다음과 같습니다.
| 5ms | 5ms + 20ms |
|---|---|
|
|
PRO S-GL 및 PRO M-GL 컬러 카메라 : 데이터 품질 향상
PRO S-GL 및 PRO M-GL 컬러 카메라의 ProjectorFringeCodingMode (프린지 코딩 모드)에서 Fast, Accurate, Reflective 옵션을 사용하면 획득한 데이터의 품질이 향상됩니다. 모든 조건이 동일한 상태에서, 서로 다른 프린지 코딩 모드 값으로 캡처한 포인트 클라우드:
| 2.5.0 | 2.5.2 | |
|---|---|---|
Accurate |
|
|
Reflective |
|
|