Mech-Eye SDK 2.2.0 업데이트 설명
이 부분에는 Mech-Eye SDK 2.2.0 버전의 추가된 기능, 최적화된 기능 및 복구된 문제에 대해 소개하겠습니다.
하이라이트
-
사전 설정 파라미터 그룹이 추가되며 다양한 응용 시나리오 또는 작업물에 적합할 수 있어 파라미터 조정 프로세스를 간소화할 수 있습니다.
-
더 나은 단일 노출 계산 결과를 제공하기 위해 “3D 노출 도우미”의 인터페이스와 기능을 최적화했습니다.
Mech-Eye Viewer
기능 추가
사전 설정 파라미터 그룹 추가
V4 카메라 펌웨어 버전을 2.2.0으로 업그레이드한 후 다양한 응용 시나리오나 작업물에 적합할 수 있는 새로운 사전 설정 파라미터 그룹이 새로 추가되었습니다. 실제 시나리오에 따라 해당 파라미터 그룹을 선택한 후 파라미터 값을 조금 조정하면 요구 사항을 충족하는 고퀄리티 데이터를 얻을 수 있어 파라미터 조정 프로세스가 단순화됩니다.
스페인어 추가
Mech-Eye Viewer 2.2.0 버전의 소프트웨어 표시 언어에 스페인어가 새로 추가되었습니다. 도움 → 설정 메뉴에서 소프트웨어 표시 언어를 변경할 수 있습니다.
기능 최적화
3D 노출 도우미 인터페이스와 기능 최적화
Mech-Eye Viewer 2.2.0 버전에서 노출 도우미 도구의 이름을 3D 노출 도우미로 변경하고 인터페이스와 기능을 최적화했습니다.
현재 3D 노출 도우미 도구를 통해 설정된 ROI에 따라 올바른 단번의 노출 시간을 자동으로 계산하고 계산 결과를 3D 파라미터 범주에 속하는 노출 시간 파라미터에 적용할 수 있습니다. 이 도구를 사용하면 파라미터 조정 프로세스를 단순화하고 뎁스 맵과 포인트 클라우드의 컬리티를 더 간편하게 개선할 수 있습니다.
연결 전 IP 주소 확인 가능
Mech-Eye Viewer 2.2.0 버전에서는 카메라에 연결하기 전에 자동으로 카메라 IP 주소를 확인하므로, 카메라에 연결할 수 없는 문제를 사전에 감지할 수 있습니다.
Mech-Eye Viewer가 시작된 후 다음 문제를 자동으로 확인합니다. 문제가 있는 카메라의 정보 카드에는 ![]() 아이콘이 표시됩니다.
아이콘이 표시됩니다.
-
카메라 IP 주소와 카메라에 연결된 컴퓨터 네트워크 포트의 IP 주소가 동일한 네트워크 세그먼트에 있는지 여부를 확인하십시오.
-
동일한 IP 주소를 가진 여러 대의 카메라가 있는지 여부를 확인하십시오.
펌웨어 및 소프트웨어 업그레이드 프로세스 최적화
Mech-Eye Viewer 2.2.0 버전은 펌웨어 및 소프트웨어 업그레이드 프로세스를 전면적으로 최적화하여 사용자의 경험을 향상시킵니다.
-
펌웨어 또는및 소프트웨어를 업그레이드 해야 할 경우, 카메라의 정보 카드에 업그레이드 버튼이 표시됩니다. 이 버튼을 클릭하면 펌웨어 또는및 소프트웨어를 업그레이드 할 수 있습니다.
-
소프트웨어를 업그레이드해야 하는 경우 업그레이드 버튼을 클릭하면 Mech-Eye SDK의 다운로드 링크가 표시됩니다. Mech-Mind 다운로드 센터 사이트를 방문하여 최신 버전의 소프트웨어를 다운로드할 수 있습니다.
데이터 저장 기능 최적화
Mech-Eye Viewer 2.2.0 버전은 데이터 저장 기능에 대해서 다음 면에서 최적화했습니다.
-
실제 사용 순서와 더욱 일치하도록 인터페이스 옵션의 정렬을 조정했습니다.
-
포인트 클라우드를 저장할 때 데이터 구조 메뉴를 통해 “정렬된 포인트 클라우드” 또는 “정렬되지 않은 포인트 클라우드”를 선택할 수 있습니다.
-
포인트 클라우드를 CSV 포맷으로 저장할 수 있습니다. CSV 포맷의 포인트 클라우드 파일은 크기가 더 작고 Microsoft Excel과 같은 프로그램이나 프로그래밍 언어를 사용하여 쉽게 처리하고 분석할 수 있습니다.
-
포인트 클라우드를 PLY 및 PCD 포맷으로 저장할 때 컬러 메뉴를 통해 저장될 포인트 클라우드의 색상을 선택할 수 있습니다. 제공되는 옵션은 포인트 클라우드 디스플레이 화면 왼쪽 표시줄에 있는 컬러 메뉴와 일치합니다.
-
저번에 캡처된 이미지를 사용하기 옵션을 새로운 데이터 획득 및 저장으로 수정하고 데이터를 다시 획득하고 저장해야 하는 데 사용됩니다.
레이저 카메라의 포인트 클라우드 퀄리티 향상
2.2.0 버전에서 레이저 카메라가 다음 파라미터를 사용하여 획득한 포인트 클라우드의 퀄리티를 향상시킵니다.
-
모든 레이저 카메라: 레이저 투사 분할 영역 수 파라미터가 1보다 큰 값으로 설정된 경우
-
Deep(V3) 및 Pro L Enhanced(V3): 프로젝터 모드 파라미터가 EnableAll 값으로 설정된 경우
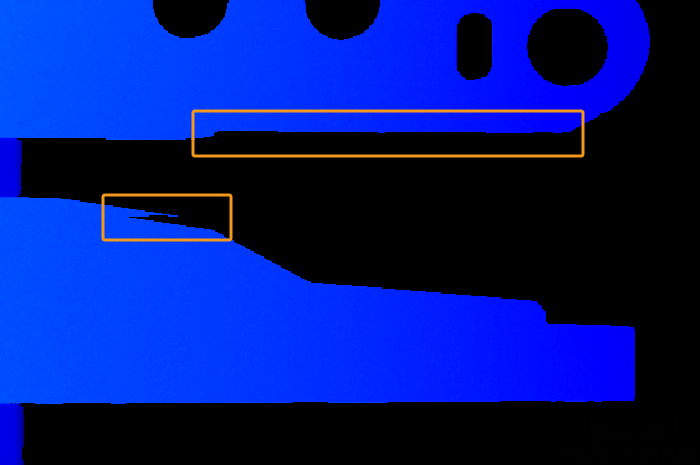
위의 카메라 및 파라미터 설정을 사용할 때, 다음과 같은 일반적인 포인트 클라우드 퀄리티 문제가 2.2.0 버전에서 감소되었습니다.
| 일반적인 문제 | 2.2.0 이전 버전 | 2.2.0 |
|---|---|---|
물체 가장자리가 누락되는 문제 |
|
|
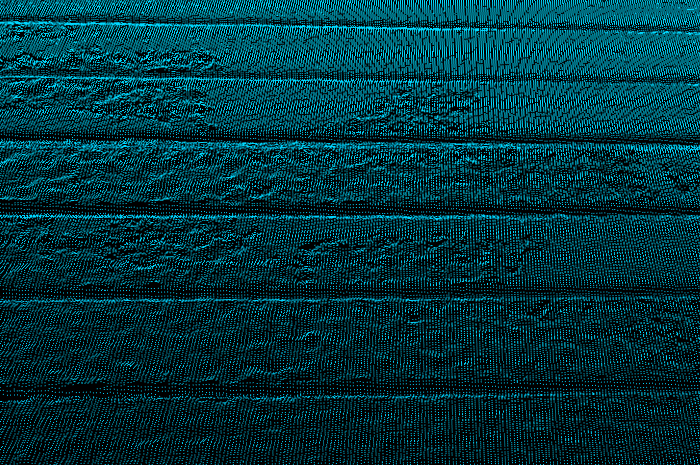
뎁스 변동이 큰 문제 |
|
|
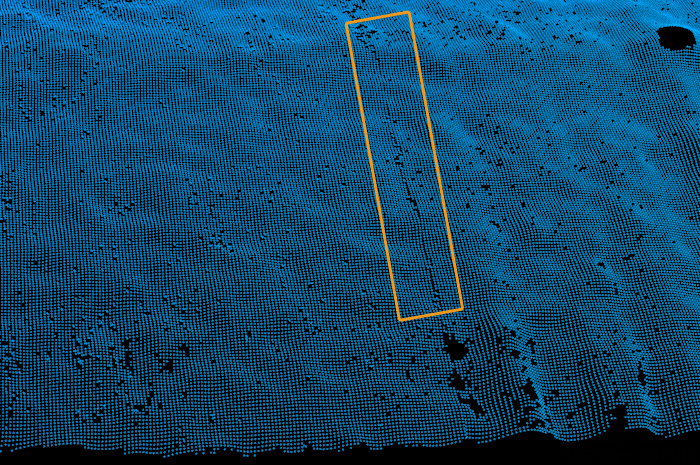
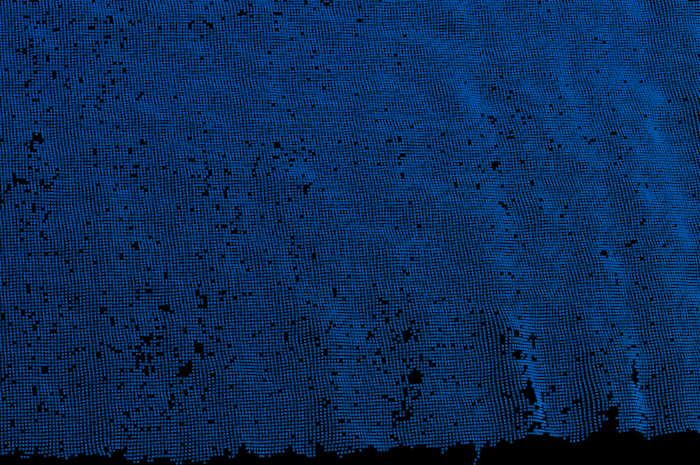
접합 부분에 틈이 있는 문제 |
|
|


문제 복구
Mech-Eye Viewer 2.2.0 버전에서 다음과 같은 문제들을 복구했습니다.
-
Mech-Eye Viewer를 열 수 없고 Windows Defender 방화벽 중 Windows Defender 방화벽을 통해 앱 또는 기능 허용의 설정을 수동으로 변경해야 열 수 있는 문제를 복구했습니다.
-
Windows 원격 데스크톱 도우미(Remote Desktop Assistant)를 통해 컴퓨터에 연결하고 Mech-Eye Viewer를 시작할 때,Mech-Eye Viewer 프로그램이 충돌하는 문제를 복구했습니다.
-
Mech-Eye Viewer를 통해 카메라에 잘못된 서브넷 마스크가 설정되어 카메라를 검색할 수 없게 될 수 있는 문제를 복구했습니다.
-
뎁스 맵 분석기에서 그려진 선에 뎁스 값이 없는 점은 오른쪽 곡선에서 뎁스 값을 갖는 문제를 복구했습니다.
-
유효한 포인트 클라우드가 획득되지 않은 상태에서 포인트 클라우드 표시 기능의 Play 버튼을 클릭한 경우, 유효한 포인트 클라우드 획득 시 포인트 클라우드의 디스플레이가 비정상적으로 되는 문제를 복구했습니다.
-
PRO S(V4) 및 PRO M(V4): 프로젝터가 가끔씩 빛을 투사하지 못하는 문제를 복구했습니다.
-
Laser L Enhanced(V3),LSR S(V4) 및 LSR L(V4): 2D 파라미터 범주에 속하는 노출 모드/2D 이미지(텍스처) 노출 모드 파라미터의 값을 HDR로 설정하면 가끔 카메라 연결이 끊어졌다가 다시 시작되는 문제를 복구했습니다.
Mech-Eye API
Mech-Eye API 2.2.0 버전이 개편되었습니다. 기존 기능을 모두 유지한 것을 바탕으로 보다 명확한 구조로 조정되었으며 새로운 기능을 제공합니다.
|
기능 추가
사전 설정 파라미터 그룹 추가
V4 카메라 펌웨어 버전을 2.2.0으로 업그레이드한 후 다양한 응용 시나리오나 작업물에 적합할 수 있는 새로운 사전 설정 파라미터 그룹이 새로 추가되었습니다. 실제 시나리오에 따라 해당 파라미터 그룹을 선택한 후 파라미터 값을 조금 조정하면 요구 사항을 충족하는 고퀄리티 데이터를 얻을 수 있어 파라미터 조정 프로세스가 단순화됩니다.
포인트 클라우드 법선 벡터 계산
다음 새로운 메소드를 호출하면 법선 벡터가 포함된 3D 데이터를 직접 획득하고 후속 데이터 처리 작업량을 줄일 수 있습니다.
| 다음 새로운 기능을 사용하려면 마이그레이션 가이드(영어 버전) 내용을 참조하여 클라이언트 프로그램을 수정해 2.2.0 버전의 Mech-Eye API에 적용해야 합니다. |
-
법선 벡터를 갖춘 포인트 클라우드(텍스처 없음) 획득:
-
C++
-
C#
-
Python
mmind::eye::Frame3D frame3D; camera.capture3DWithNormal(frame3D); PointCloudWithNormals pointCloud = frame3D.getUntexturedPointCloudWithNormals();var frame3D = new Frame3D(); camera.Capture3DWithNormal(ref frame3D); var pointCloud = frame3D.GetUntexturedPointCloudWithNormals();frame_3d = Frame3D() camera.capture_3d_with_normal(frame_3d) point_cloud = frame_3d.get_untextured_point_cloud_with_normals() -
-
법선 벡터를 갖춘 포인트 클라우드(텍스처 있음) 획득:
-
C++
-
C#
-
Python
mmind::eye::Frame2DAnd3D frame2DAnd3D; camera.capture2DAnd3DWithNormal(frame2DAnd3D); TexturedPointCloudWithNormals pointCloud = frame2DAnd3D.getTexturedPointCloudWithNormals();var frame2DAnd3D = new Frame2DAnd3D(); camera.Capture2DAnd3DWithNormal(ref frame2DAnd3D); var pointCloud = frame2DAnd3D.GetTexturedPointCloudWithNormals();frame_2d_and_3d = Frame2DAnd3D() camera.capture_2d_and_3d_with_normal(frame_2d_and_3d) point_cloud = frame_2d_and_3d.get_textured_point_cloud_with_normals() -
카메라 연결 상태 감지
새로운 하트비트 신호 전송 메커니즘을 추가하여 카메라 연결 끊김 문제를 감지할 수 있습니다.
| 다음 새로운 기능을 사용하려면 마이그레이션 가이드(영어 버전) 내용을 참조하여 클라이언트 프로그램을 수정해 2.2.0 버전의 Mech-Eye API에 적용해야 합니다. |
-
하트비트 신호의 빈도는 다음과 같은 메소드로 설정합니다.
-
C++
-
C#
-
Python
camera.setHeartbeatInterval(1000);camera.SetHeartbeatInterval(1000);camera.set_heartbeat_interval(1000) -
-
다음 메소드로 콜백(Callback) 함수를 등록하면 카메라 연결 끊김을 자동으로 감지하고 오류 알람을 제공합니다.
-
C++
-
C#
-
Python
mmind::eye::CameraEvent::EventCallback callback = [](mmind::eye::CameraEvent::Event event, void* pUser) { std::cout << "A camera event has occurred. The event ID is " << event << "." << std::endl; }; mmind::eye::CameraEvent::registerCameraEventCallback(camera, callback, nullptr, mmind::eye::CameraEvent::CAMERA_EVENT_DISCONNECTED);private static void CallbackFunc(CameraEvent.Event cameraEvent, IntPtr pUser) { Console.WriteLine("A camera event has occurred. The event ID is {0}.", cameraEvent); } Utils.ShowError(CameraEvent.RegisterCameraEventCallback(ref camera, CallbackFunc, IntPtr.Zero, (uint)CameraEvent.Event.CAMERA_EVENT_DISCONNECTED));class CustomCallback(EventCallbackBase): def __init__(self): super().__init__() def run(self, event): print("A camera event has occurred. The event ID is {0}.".format(event)) camera_event = CameraEvent() callback = CustomCallback() show_error(camera_event.register_camera_event_callback(camera, callback, CameraEvent.CAMERA_EVENT_ALL)) -
포인트 클라우드 저장 메소드 제공
다음과 같은 새로운 메소드를 호출하면 타사 소프트웨어 라이브러리에 의존하지 않고 PLY, PCD 또는 CSV 포맷으로 포인트 클라우드를 직접 저장할 수 있습니다.
| 다음 새로운 기능을 사용하려면 마이그레이션 가이드(영어 버전) 내용을 참조하여 클라이언트 프로그램을 수정해 2.2.0 버전의 Mech-Eye API에 적용해야 합니다. |
-
텍스처가 없는 포인트 클라우드 저장:
-
C++
-
C#
-
Python
mmind::eye::Frame3D frame3D; camera.capture3D(frame3D); frame3D.saveUntexturedPointCloud(mmind::eye::FileFormat::PLY, "PointCloud.ply");var frame3D = new frame3D(); camera.Capture3D(ref frame3D); frame3D.SaveUntexturedPointCloud(FileFormat.PLY, "PointCloud.ply");frame_3d = Frame3D() camera.capture_3d(frame_3d) frame_3d.save_untextured_point_cloud(FileFormat_PLY, "PointCloud.ply") -
-
텍스처가 있는 포인트 클라우드 저장:
-
C++
-
C#
-
Python
mmind::eye::Frame2DAnd3D frame2DAnd3D; camera.capture2DAnd3D(frame2DAnd3D); frame2DAnd3D.saveTexturedPointCloud(mmind::eye::FileFormat::PLY, "TexturedPointCloud.ply");var frame2DAnd3D = new Frame2DAnd3D(); camera.Capture2DAnd3D(ref frame2DAnd3D); frame2DAnd3D.SaveTexturedPointCloud(FileFormat.PLY, "TexturedPointCloud.ply");frame_2d_and_3d = Frame2DAnd3D() camera.capture_2d_and_3d(frame_2d_and_3d) frame_2d_and_3d.save_textured_point_cloud(FileFormat_PLY, "TexturedPointCloud.ply") -
IP 구성 도구 추가
2.2.0 버전에서는 Mech-Eye Viewer에서 제공하는 모든 관련 기능을 포함하여 실행 파일 형식으로 IP 구성 도구를 제공하며, Ubuntu 시스템에서도 카메라의 IP 구성을 완료할 수 있습니다.
LabView 및 VisionPro 예제 프로그램 제공
C# Mech-Eye API를 통해 LabView 및 VisionPro에서 카메라를 연결하고 컨트롤할 수 있습니다. GitHub에서 관련 예제 프로그램을 다운받을 수 있습니다.
|
다음 버전이 테스트되었습니다.
|
기능 최적화
레이저 카메라의 포인트 클라우드 퀄리티 향상
2.2.0 버전에서 레이저 카메라가 다음 파라미터를 사용하여 획득한 포인트 클라우드의 퀄리티를 향상시킵니다.
-
모든 레이저 카메라: 레이저 투사 분할 영역 수 파라미터가 1보다 큰 값으로 설정된 경우
-
Deep(V3) 및 Pro L Enhanced(V3): 프로젝터 모드 파라미터가 EnableAll 값으로 설정된 경우
위의 카메라 및 파라미터 설정을 사용할 때, 다음과 같은 일반적인 포인트 클라우드 퀄리티 문제가 2.2.0 버전에서 감소되었습니다.
| 일반적인 문제 | 2.2.0 이전 버전 | 2.2.0 |
|---|---|---|
물체 가장자리가 누락되는 문제 |
|
|
뎁스 변동이 큰 문제 |
|
|
접합 부분에 틈이 있는 문제 |
|
|
GenICam 인터페이스
기능 추가
사전 설정 파라미터 그룹 추가
V4 카메라 펌웨어 버전을 2.2.0으로 업그레이드한 후 다양한 응용 시나리오나 작업물에 적합할 수 있는 새로운 사전 설정 파라미터 그룹이 새로 추가되었습니다. 실제 시나리오에 따라 해당 파라미터 그룹을 선택한 후 파라미터 값을 조금 조정하면 요구 사항을 충족하는 고퀄리티 데이터를 얻을 수 있어 파라미터 조정 프로세스가 단순화됩니다.
IP 구성 도구 추가
2.2.0 버전에서는 Mech-Eye Viewer에서 제공하는 모든 관련 기능을 포함하여 실행 파일 형식으로 IP 구성 도구를 제공하며, Ubuntu 시스템에서도 카메라의 IP 구성을 완료할 수 있습니다.
기능 최적화
레이저 카메라의 포인트 클라우드 퀄리티 향상
2.2.0 버전에서 레이저 카메라가 다음 파라미터를 사용하여 획득한 포인트 클라우드의 퀄리티를 향상시킵니다.
-
모든 레이저 카메라: 레이저 투사 분할 영역 수 파라미터가 1보다 큰 값으로 설정된 경우
-
Deep(V3) 및 Pro L Enhanced(V3): 프로젝터 모드 파라미터가 EnableAll 값으로 설정된 경우
위의 카메라 및 파라미터 설정을 사용할 때, 다음과 같은 일반적인 포인트 클라우드 퀄리티 문제가 2.2.0 버전에서 감소되었습니다.
| 일반적인 문제 | 2.2.0 이전 버전 | 2.2.0 |
|---|---|---|
물체 가장자리가 누락되는 문제 |
|
|
뎁스 변동이 큰 문제 |
|
|
접합 부분에 틈이 있는 문제 |
|
|