Mech-Eye SDK 2.3.4 업데이트 설명
이 부분에는 Mech-Eye SDK 2.3.4 버전의 추가된 기능, 최적화된 기능 및 복구된 문제에 대해 소개하겠습니다.
Mech-Eye Viewer
DEEP, LSR S 및 LSR L: “Reflective” 프린지 코딩 모드에 새로운 옵션 추가, 더 완전한 뎁스 데이터를 제공 가능
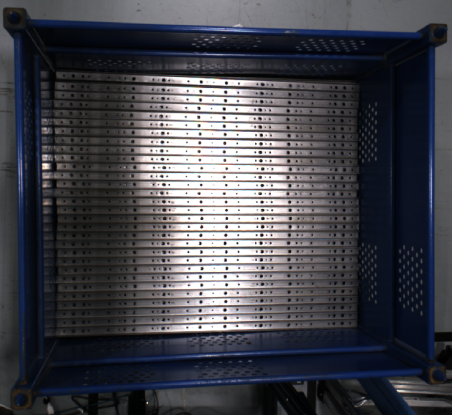
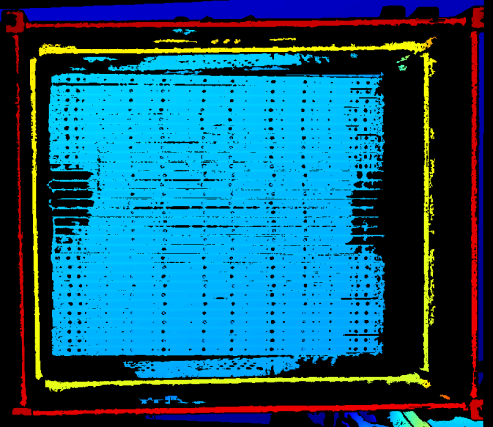
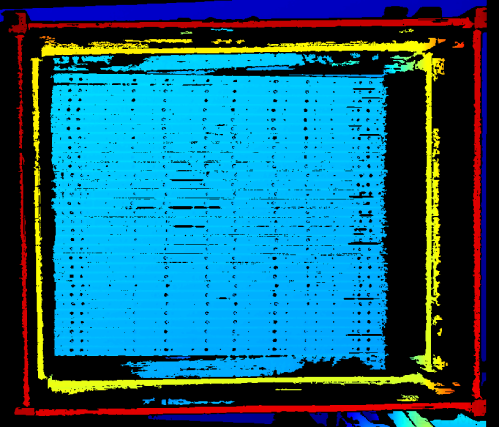
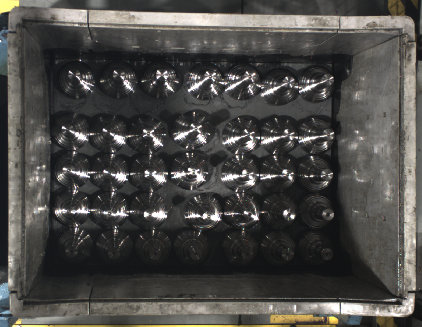
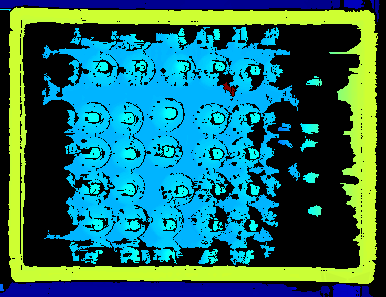
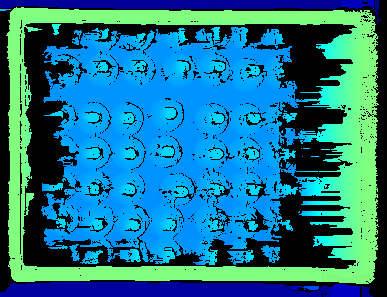
DEEP, LSR S 및 LSR L 카메라 펌웨어를 2.3.4 버전으로 업그레이드한 후 프린지 코딩 모드 파라미터의 Reflective 옵션을 사용할 때, 다양한 데이터의 처리 모드를 선택하기 위한 프로세싱 모드 파라미터가 추가되었습니다. Faster 옵션은 2.3.3 버전과 동일한 효과와 속도를 가지며, More complete 옵션은 더 나은 뎁스 데이터를 제공하여 뎁스 맵과 포인트 클라우드의 완전성을 높일 수 있습니다. 벽이 종종 다중 반사를 일으키는 트레이와 같이 복잡한 반사 조건이 있는 시나리오의 경우 데이터 품질을 보장하기 위해 More complete 옵션을 사용하는 것이 좋습니다.
| More complete 옵션을 사용할 때 처리 속도가 상대적으로 느립니다. 다른 조건이 동일한 경우, More complete 옵션을 사용할 때의 처리 속도는 Faster보다 약 1초 느립니다. |
| 대상 물체 | Faster | More complete |
|---|---|---|
|
|
|
|
|
|
문제 복구
Mech-Eye SDK 2.3.4 버전에서는 다음 문제를 해결했습니다.
-
카메라 온도가 높을 때 카메라 연결이 끊어졌다가 다시 시작되는 문제가 종종 발생했습니다. 이때 로그에 0x0315라는 오류 코드와 함께 오류 메시지가 나타났습니다. 새 버전에서는 이 문제를 해결했습니다.
-
NANO ULTRA: 3D 파라미터 범주 속의 노출 시간 파라미터를 작은 값으로 설정한 경우, 뎁스 맵과 포인트 클라우드에 줄무늬 또는 타원형 모양의 뎁스 변동이 발생하는 문제를 해결했습니다.
-
Deep, Laser L, Log S, Log M, Pro S Enhanced, Pro M Enhanced 및 Pro L Enhanced: 카메라 펌웨어 버전을 2.3.2 또는 2.3.3 버전으로 업그레이드한 후, 카메라가 검색될 수 없는 문제가 종종 발생했습니다. 이때 로그에 0x0107이라는 오류 코드와 함께 오류 메시지가 나타났습니다. 새 버전에서는 이 문제를 해결했습니다.
-
내부 파라미터 도구를 사용하여 내부 파라미터를 보정한 후, 결과 창을 닫지 않고 Mech-Eye Viewer를 종료하면 결과 창이 계속 열려 있는 문제를 해결했습니다.
Mech-Eye API
DEEP, LSR S 및 LSR L: “Reflective” 프린지 코딩 모드에 새로운 옵션 추가, 더 완전한 뎁스 데이터를 제공 가능
DEEP, LSR S 및 LSR L 카메라 펌웨어를 2.3.4 버전으로 업그레이드한 후, LaserFringeCodingMode(프린지 코딩 모드) 파라미터의 Reflective 옵션을 사용할 때, 다양한 데이터의 처리 모드를 선택하기 위한 ProcessingMode(프로세싱 모드) 파라미터가 추가되었습니다. Faster 옵션은 2.3.3 버전과 동일한 효과와 속도를 가지며, MoreComplete 옵션은 더 나은 뎁스 데이터를 제공하여 뎁스 맵과 포인트 클라우드의 완전성을 높일 수 있습니다. 벽이 종종 다중 반사를 일으키는 트레이와 같이 복잡한 반사 조건이 있는 시나리오의 경우 데이터 품질을 보장하기 위해 MoreComplete 옵션을 사용하는 것이 좋습니다.
| MoreComplete 옵션을 사용할 때 처리 속도가 상대적으로 느립니다. 다른 조건이 동일한 경우, More complete 옵션을 사용할 때의 처리 속도는 Faster보다 약 1초 느립니다. |
| 대상 물체 | Faster | MoreComplete |
|---|---|---|
|
|
|
|
|
|
IP 구성 도구: 비대화형 명령 모드 추가
비대화형 명령 모드가 IP 구성 도구에 새로 추가되었습니다. 이 모드에서는 명령어를 실행하여 해당 IP 구성 수정을 완료할 수 있으며, 이 도구를 기반으로 IP 구성 그래픽 사용자 인터페이스를 개발하는 등 보다 다양한 요구 사항을 충족할 수 있습니다.
포인트 클라우드의 포인트 좌표 단위 설정 가능
다음 메소드를 호출하여 포인트 클라우드의 포인트 좌표 단위를 획득하고 설정할 수 있습니다.
| 이 메소드는 데이터 획득 전에 호출되어야 합니다. |
-
C++
-
C#
-
Python
ErrorStatus getPointCloudUnit(CoordinateUnit& unit) const;
ErrorStatus setPointCloudUnit(CoordinateUnit unit);ErrorStatus GetPointCloudUnit(ref CoordinateUnit unit);
ErrorStatus SetPointCloudUnit(CoordinateUnit unit);err, unit = self.camera.get_point_cloud_unit()
self.camera.set_point_cloud_unit(Unit)문제 복구
Mech-Eye SDK 2.3.4 버전에서는 다음 문제를 해결했습니다.
-
카메라 온도가 높을 때 카메라 연결이 끊어졌다가 다시 시작되는 문제가 종종 발생했습니다. 이때 로그에 0x0315라는 오류 코드와 함께 오류 메시지가 나타났습니다. 새 버전에서는 이 문제를 해결했습니다.
-
NANO ULTRA: 3D 파라미터 범주 속의 노출 시간 파라미터를 작은 값으로 설정한 경우, 뎁스 맵과 포인트 클라우드에 줄무늬 또는 타원형 모양의 뎁스 변동이 발생하는 문제를 해결했습니다.
-
Deep, Laser L, Log S, Log M, Pro S Enhanced, Pro M Enhanced 및 Pro L Enhanced: 카메라 펌웨어 버전을 2.3.2 또는 2.3.3 버전으로 업그레이드한 후, 카메라가 검색될 수 없는 문제가 종종 발생했습니다. 이때 로그에 0x0107이라는 오류 코드와 함께 오류 메시지가 나타났습니다. 새 버전에서는 이 문제를 해결했습니다.
-
Nano, NANO 및 PRO XS:
getUntexturedPointCloudWithNormals()및getTexturedPointCloudWithNormals()메소드를 호출할 때, 획득한 포인트 클라우드에 좌표가 (0,0,0)인 포인트가 포함되어 있는 문제를 헤결했습니다. -
Python:
get_textured_point_cloud_with_normals()메서드를 호출하여 법선 벡터의 X 구성 요소 데이터를 얻을 수 없는 문제를 헤결했습니다.
GenICam 인터페이스
DEEP, LSR S 및 LSR L: “Reflective” 프린지 코딩 모드에 새로운 옵션 추가, 더 완전한 뎁스 데이터를 제공 가능
DEEP, LSR S 및 LSR L 카메라 펌웨어를 2.3.4 버전으로 업그레이드한 후, LaserFringeCodingMode(프린지 코딩 모드) 파라미터의 Reflective 옵션을 사용할 때, 다양한 데이터의 처리 모드를 선택하기 위한 ProcessingMode(프로세싱 모드) 파라미터가 추가되었습니다. Faster 옵션은 2.3.3 버전과 동일한 효과와 속도를 가지며, MoreComplete 옵션은 더 나은 뎁스 데이터를 제공하여 뎁스 맵과 포인트 클라우드의 완전성을 높일 수 있습니다. 벽이 종종 다중 반사를 일으키는 트레이와 같이 복잡한 반사 조건이 있는 시나리오의 경우 데이터 품질을 보장하기 위해 MoreComplete 옵션을 사용하는 것이 좋습니다.
| MoreComplete 옵션을 사용할 때 처리 속도가 상대적으로 느립니다. 다른 조건이 동일한 경우, More complete 옵션을 사용할 때의 처리 속도는 Faster보다 약 1초 느립니다. |
| 대상 물체 | Faster | MoreComplete |
|---|---|---|
|
|
|
|
|
|
IP 구성 도구: 비대화형 명령 모드 추가
비대화형 명령 모드가 IP 구성 도구에 새로 추가되었습니다. 이 모드에서는 명령어를 실행하여 해당 IP 구성 수정을 완료할 수 있으며, 이 도구를 기반으로 IP 구성 그래픽 사용자 인터페이스를 개발하는 등 보다 다양한 요구 사항을 충족할 수 있습니다.
문제 복구
Mech-Eye SDK 2.3.4 버전에서는 다음 문제를 해결했습니다.
-
카메라 온도가 높을 때 카메라 연결이 끊어졌다가 다시 시작되는 문제가 종종 발생했습니다. 이때 로그에 0x0315라는 오류 코드와 함께 오류 메시지가 나타났습니다. 새 버전에서는 이 문제를 해결했습니다.
-
NANO ULTRA: 3D 파라미터 범주 속의 노출 시간 파라미터를 작은 값으로 설정한 경우, 뎁스 맵과 포인트 클라우드에 줄무늬 또는 타원형 모양의 뎁스 변동이 발생하는 문제를 해결했습니다.
-
Deep, Laser L, Log S, Log M, Pro S Enhanced, Pro M Enhanced 및 Pro L Enhanced: 카메라 펌웨어 버전을 2.3.2 또는 2.3.3 버전으로 업그레이드한 후, 카메라가 검색될 수 없는 문제가 종종 발생했습니다. 이때 로그에 0x0107이라는 오류 코드와 함께 오류 메시지가 나타났습니다. 새 버전에서는 이 문제를 해결했습니다.