点群モデルの作成戦略
以下では、実際の状況に応じて点群モデルの作成方法を選択する方法と、特徴点群の選択方法について説明します。
点群モデルの作成方法を選択
下表は、一般的な点群モデルの作成方法、各方法の適用シーンと例を示します。
| 点群モデルの作成方法 | 適用シーン | 例 | |
|---|---|---|---|
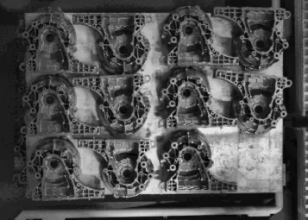
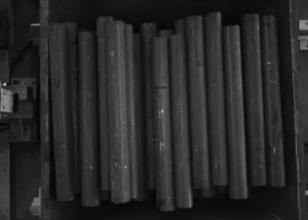
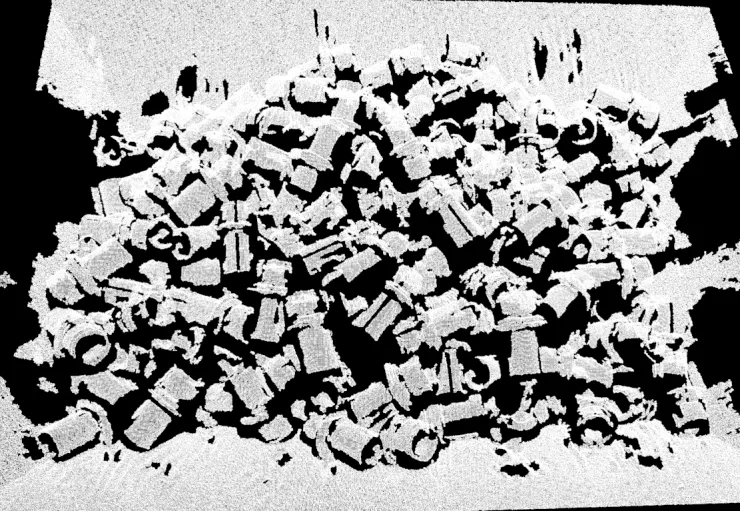
バラ積みピッキングや、ワークの位置姿勢の変化によって特徴点群が明らかに変化するシーン(例:バラ積みされた板金部品、バラ積みされた棒材) |
|
|
|
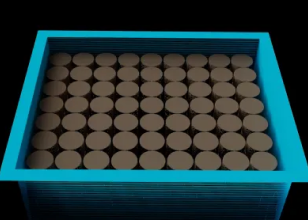
比較的に整列して並べられているワークの把持や、ワーク表面の特徴点群に明らかな変化がないシーン(例:通い箱、整列して並べられているハウジング) |
|
|
|
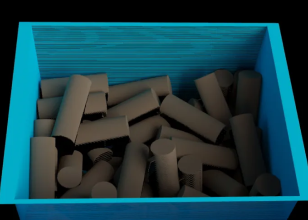
整列して並べられている円棒・リング・長方形部品、バラ積みされた棒材にのみ適用 |
|
|
|
ステップからサイズ情報を入力して点群モデルを生成 |
動的にステップパラメータを調整して点群モデルを切り替えるシーン(例:整列して並べられているブレーキディスク・棒材) |
|
|




|
「ステップからサイズ情報を入力して点群モデルを生成」を選択した場合、3Dマッチング ステップの 入力出力設定(詳細/上級のパラメータ調整レベル) で 外部モデル を有効にし、ステップで「サーフェスモデル点群」、「エッジモデル点群」、「対象物中心点」の入力ポートを追加してプロジェクト情報を入力する必要があります。 |
特徴点群を選択
点群モデルを作成する際には、元の点群からマッチングに干渉する可能性のある不要な点群を除去し、最も代表的な点群を選択して点群モデルを作成することで、マッチングプロセスを最適化し、マッチング効率と精度を向上させます。以下では、実際の状況に基づいて特徴点群を選択する方法について説明します。
ワークの点群が比較的完全である場合
STLファイルをインポートして点群モデルを生成
エッジ点群モデル
-
対称性を持つワーク
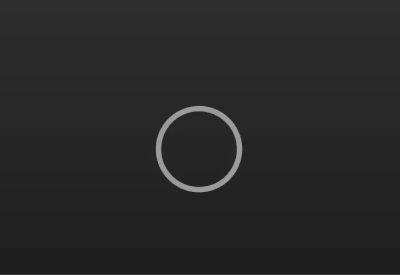
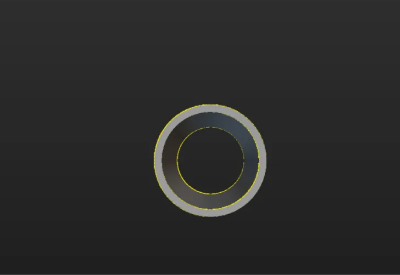
実際のアプリケーションでは、ワークは通常複数の配置姿勢を持つため、ワークのエッジ特徴を反映する点群のみを抽出し、点群モデルとして保存します。
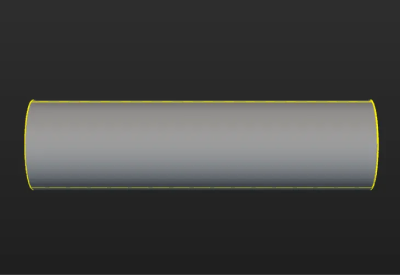
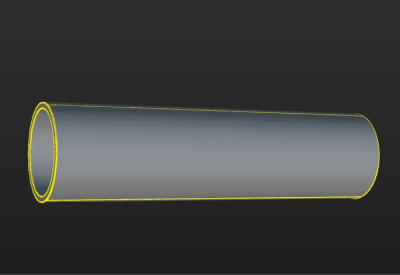
下図は円管のエッジ点群モデルを示します。円管は円柱に似ており対称性があるため、円柱の側面のエッジ点群のみを保持します。また、円管の両端を正確に位置決めできるようにするために、円管の両端のエッジ点群も保持する必要があります。
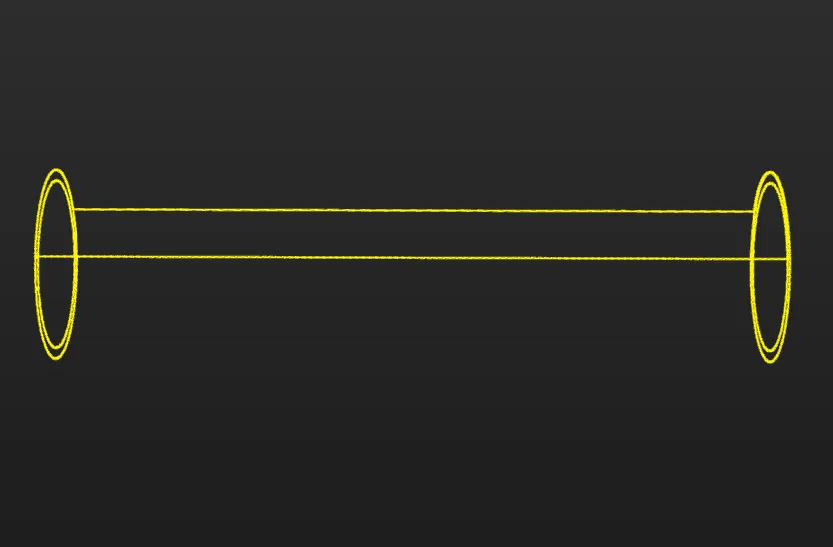
下表は、円管が異なる配置姿勢にある場合の対応するエッジ点群です。
円管の配置姿勢 対応するエッジ点群(黄色で表示) 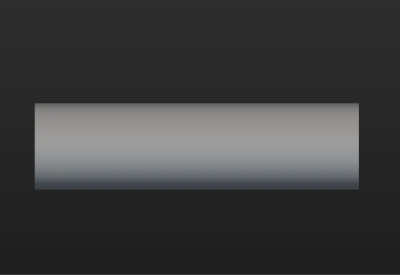
-
対称性がないワーク
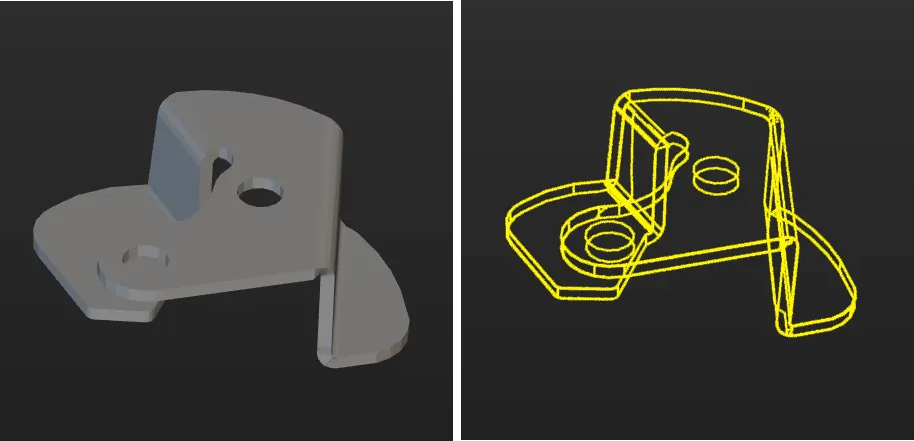
下図は、板金部品のエッジ点群モデルを示します。板金部品は対称性がないため、すべての視点からのエッジ点群を保持する必要があります。
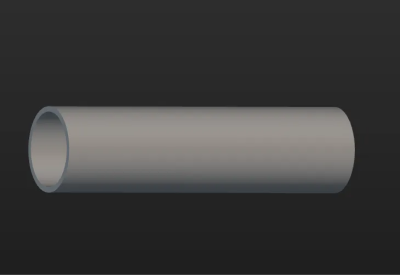
サーフェス点群モデル
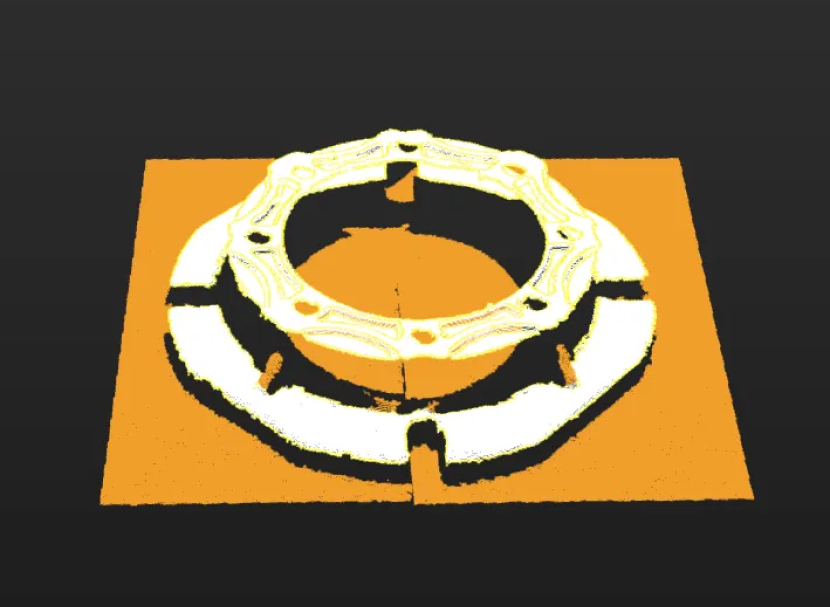
サーフェス点群モデルは、位置姿勢の正確性を検証し、位置姿勢の信頼度を計算する際に重要な役割を果たします。そのため、サーフェス点群モデルを作成する際には、完全なワークのサーフェス点群を使用することを推奨します。これにより、サーフェス点群モデルの有効性が向上します。下図は円管のサーフェス点群モデルを示します。

|
STLモデルから点群を生成する場合、STLモデルの法線ベクトルが正しいかを確認する必要があります。STLモデルの法線ベクトルに異常がある場合、生成された点群の法線ベクトルも異常となり、マッチング精度に直接影響します。 STLモデルの法線ベクトルの確認方法や修正方法については、STLモデルを修正 をご参照ください。 |
反射によって点群が抜けている場合

ワーク全体がカメラの視野に収まっていない場合
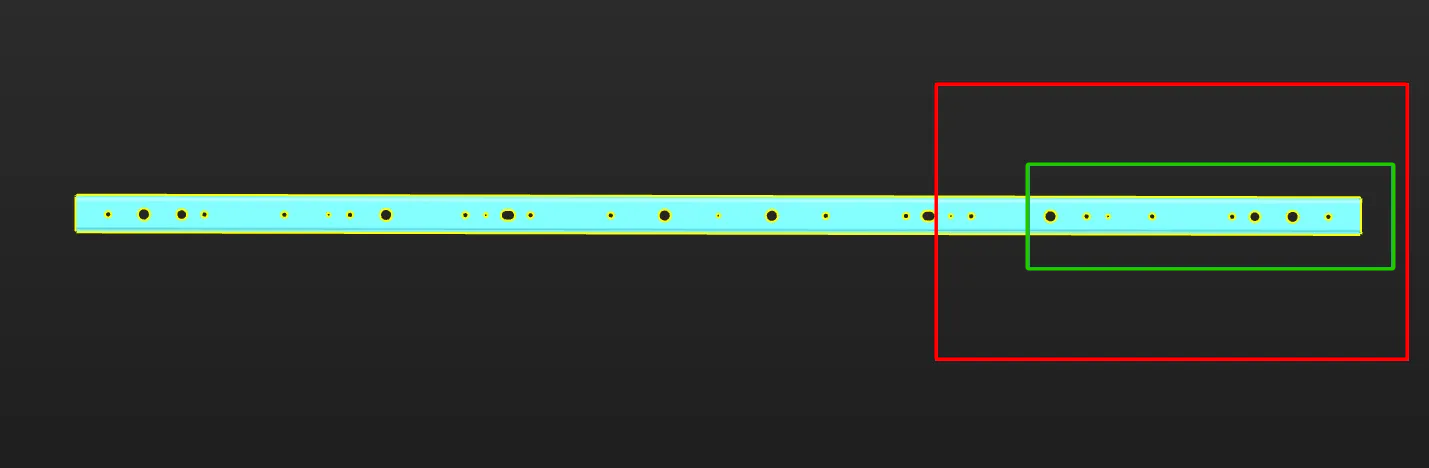
ワーク全体がカメラの視野に収まっていない場合、マッチングに使用する重要な特徴点群がカメラの視野内に収まるように優先して確認する必要があります。また、視野の制限により完全に取得できていない可能性がある視野の端にある点群は、適宜除去することができます。
下図は、長方形の板金部品の点群モデルを示します。右側の赤枠で示された範囲がカメラの視野であると仮定します。マッチングの安定性を確保するためには、緑枠で示された範囲内の点群を点群モデルとして選択することを推奨します。また、カメラで撮影する際には、必ず緑枠で示された範囲がカメラの視野内に収まっていることを確認し、特に右側のエッジ部分が視野内に収まるようにしてください。