位置姿勢を調整(S形状でソート)
まず「S形状でソート」の適用シーンと適用例を紹介し、「位置姿勢を調整(S形状でソート)」のサンプルプロジェクトを例にとって、実践ガイドを提供します。次に、位置姿勢を一括調整(V2) ステップのパラメータ調整方法を説明し、最後に実際の適用時の注意事項を紹介します。
適用例
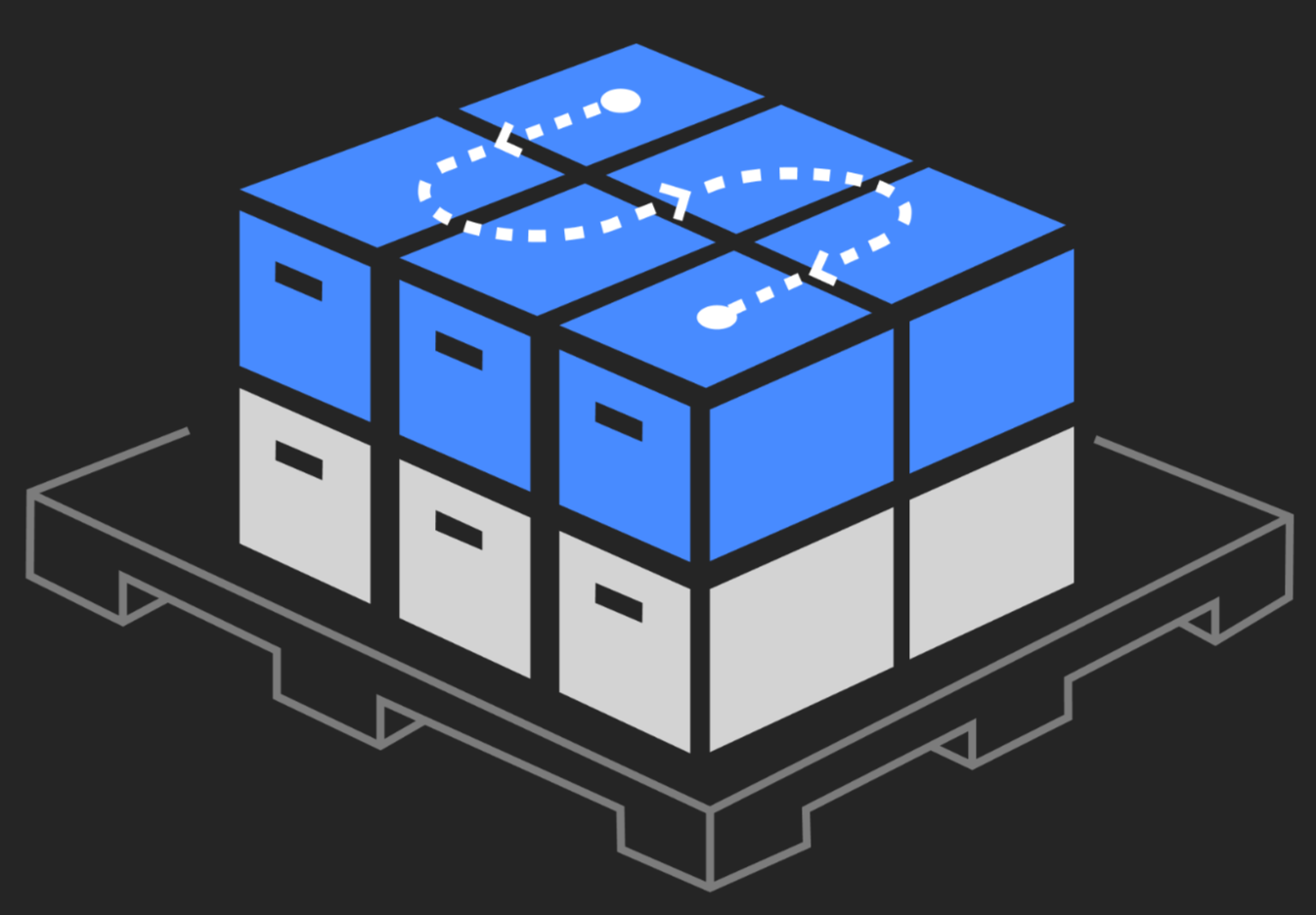
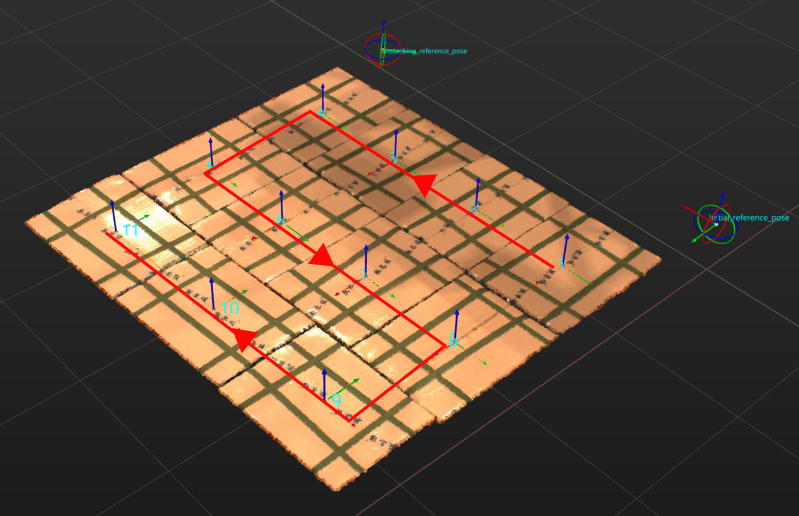
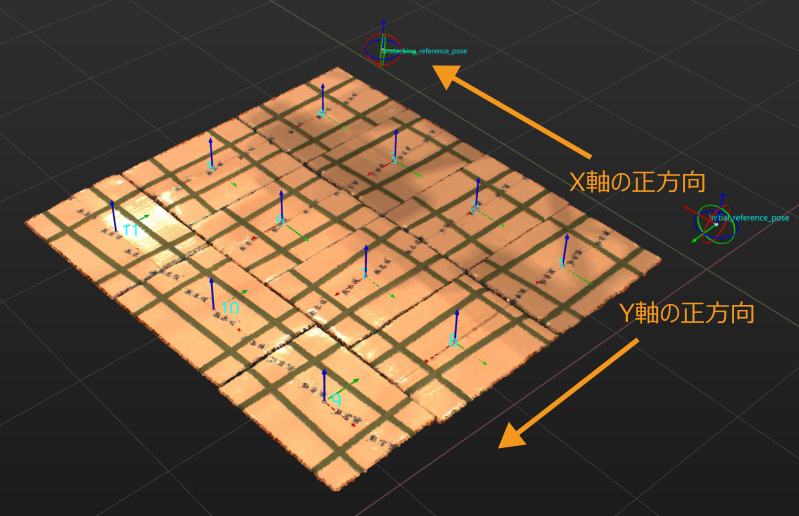
以下では、段ボール箱のデパレタイジングを例として、「位置姿勢を調整(S形状でソート)」のサンプルプロジェクトを使用し、ロボットが下図の矢印で示した「S」形状の順序に箱を把持するようにします。
ロボットが箱を把持したときの効果を下図に示します。
以下は、この例に基づいた実践ガイドと注意事項の説明です。
実践ガイド
適用シーンを理解した後、それを使用する必要がある場合は、ソリューションライブラリから関連プロジェクトをダウンロードし、以下の内容を参考にしてパラメータの調整方法を学んでください。
「位置姿勢を調整(S形状でソート)」のプロジェクトはMech-Visionのソリューションライブラリにあり、実践例の下からダウンロードして使用できます。プロジェクトを作成した後、位置姿勢を一括調整(V2) ステップを選択し、設定ツール ボタンをクリックして、位置姿勢編集ツール を開きます。位置姿勢調整、位置姿勢処理ルール、共通設定の3つの手順が含まれます。

-
位置姿勢調整:位置姿勢の向きを調整します。
-
位置姿勢処理ルール:実際の要件に基づいて位置姿勢をソートし、要件を満たしていない位置姿勢を除去します。
-
共通設定:位置姿勢処理以外の設定を行い、位置姿勢と1対1に対応する他のデータ(箱の寸法など)を再ソートすることができます。
以下は、各手順の主要なパラメータの説明です。
位置姿勢調整
-
方向の調整方式を選択します。
対象物の位置姿勢を自動的にZ軸上向きにするため、方向調整 を 自動合わせ に設定することを推奨します。
その他の方向調整方式については、位置姿勢の方向を調整 をご参照ください。
-
適用シーンを選択します。
位置姿勢のX軸方向を統一し、箱を把持する際の余分な動きを避けるため、適用シーン を 段ボール箱のパレタイジング・デパレタイジング に設定する必要があります。
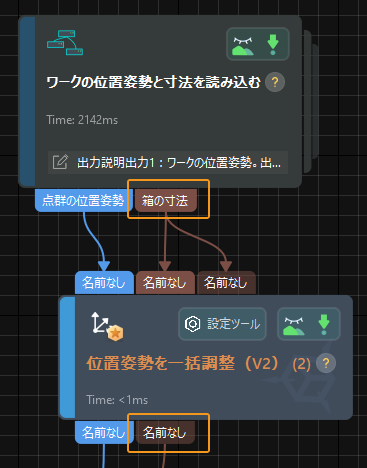
段ボール箱のパレタイジング・デパレタイジング を選択した後、位置姿勢を一括調整(V2) ステップには1つの入力ポートが追加されます。箱寸法を入力するために、このポートを ワークの位置姿勢と寸法を読み込む ステップの「箱の寸法」出力ポートに接続します。
-
箱の形状を判断します。
正方形サイズの判定しきい値 パラメータは、箱の表面が正方形かどうかを判断するために使用されます。位置姿勢を一括調整(V2) ステップで入力された箱の長さと幅の差がこのしきい値より小さい場合、箱の表面は正方形と見なされます。このパラメータを実際の状況に応じて設定してください。
正方形サイズの判定しきい値 パラメータを設定した後、データを取得 ボタンをクリックすると、箱の寸法と位置姿勢が自動的に取得され、位置姿勢も調整されます。
-
位置姿勢調整の目標方向を選択します。
このサンプルプロジェクトでは、段ボール箱が交互に配置されているため、異なる配置方法において、ロボットが段ボール箱を把持する際の回転運動を最小限に抑えるために、目標方向を設定 を マニピュレータによる設定、方向 を X軸の正方向 に設定します。
上記の設定が完了したら、次へ をクリックして位置姿勢処理ルールの画面に入ります。
位置姿勢処理ルール
-
ソート方法を選択します。
平面上のS形状でソート を選択します。
-
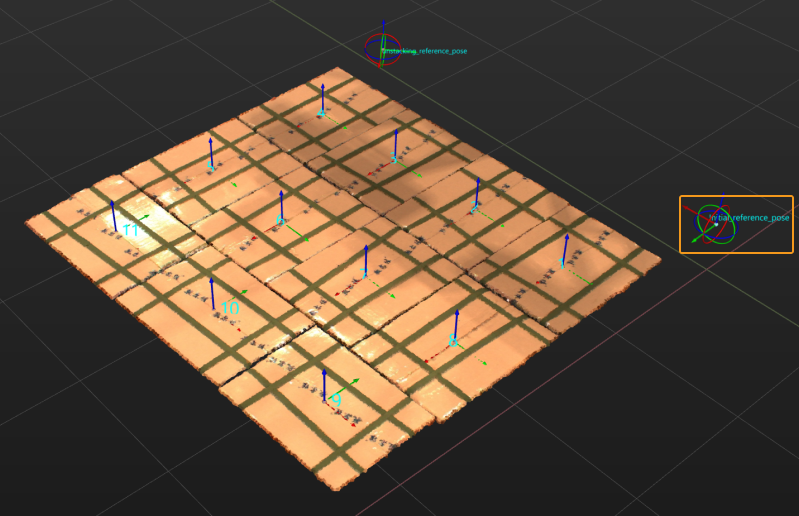
基準位置姿勢を設定します。
この基準位置姿勢は、把持の開始位置を確認するために使用されます。基準位置姿勢の設定方法については、基準位置姿勢の設定 をご参照ください。デパレタイジングシーンでは、ワーク位置が固定されているため(このサンプルプロジェクトでは箱が右上にある)、マニピュレータによる設定 を選択して基準位置姿勢を右上に設定する必要があります。実際のシーンでは、実際の把持開始位置に基づいて基準位置姿勢を設定してください。
-
行列方向を設定します。
最適な把持順序を確保するために、箱を把持する際の 行方向 と 列方向 を設定する必要があります。
このサンプルプロジェクトでは、基準位置姿勢が右上にあるため、最適な把持順序を確保するために、行方向 を 基準位置姿勢のX軸の正方向 に設定し、列方向 を 基準位置姿勢のY軸の正方向 に設定します。実際のシーンでは、実際の把持開始位置に基づいて行/列方向を設定してください。
-
行間隔を設定します。
行間隔とは、平面上のS形状でソートする時の各行の対象物の位置姿勢の間隔を指します。実際のシーンでは、このパラメータを各行の対象物の位置姿勢間隔に基づいて設定してください。
上記の設定が完了したら、次へ をクリックして共通設定の画面に入ります。
共通設定
このサンプルプロジェクトでは、箱の寸法と位置姿勢データを一緒にソートして出力するために、新規ポート数を設定 のパラメータ値を1に変更する必要があります。変更後、位置姿勢を一括調整(V2) ステップには新しい入力ポートと出力ポートがそれぞれ1つ追加され、箱の寸法データの入力と出力が可能になります。
この場合、ワークの位置姿勢と寸法を読み込む ステップの「箱の寸法」出力ポートを 位置姿勢を一括調整(V2) の新しくい入力ポートに接続します。位置姿勢を一括調整(V2) ステップの新しい出力ポートをその後のステップの入力ポートに接続します。最後に データを取得 ボタンをクリックします。
| 他のデータをソートする必要がない場合、新規ポート数を設定 のパラメータ値を変更する必要はありません。 |
これで、関連するパラメータの調整が完了しました。保存 ボタンをクリックして変更を保存します。
注意事項
実際のアプリケーションでは、以下の注意事項に従った上で、プロジェクトに 位置姿勢を一括調整(V2) ステップを追加し、データフローを接続してください。
-
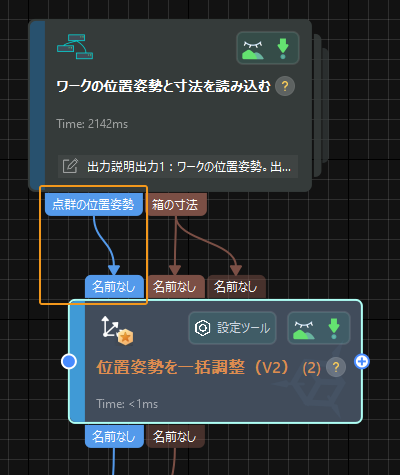
位置姿勢を一括調整(V2) ステップの前に、ワークの位置姿勢を認識し、最高層の全てのワークの位置姿勢を正常に出力できるステップまたはステップの組合せ(ワークの位置姿勢と寸法を読み込む など)を接続する必要があります。これらのステップまたはステップの組合せの位置姿勢出力ポートは、位置姿勢を一括調整(V2) ステップの位置姿勢入力ポートに接続して、位置姿勢のソートを行います。
-
ロボットが「S」形状に箱を把持し、調整された位置姿勢を出力するために、位置姿勢を一括調整(V2) ステップの後には、経路計画 や 出力 ステップなどの他の位置姿勢入力の関連ステップを接続する必要があります。
-
デパレタイジングの場合、箱の形状を判断するために、プロジェクトに箱の寸法を出力するためのステップが必要です。