点群モデルの作成方法(代表的なソリューション)
代表的なソリューションでは、下表を参考にしてワークの点群モデルと把持位置姿勢を作成できます。
| ワーク | ワーク特徴 | 点群モデルの作成方法 | エッジ点群モデル | サーフェス点群モデル | 把持位置姿勢の作成方法 | 把持位置姿勢 | ロボットハンド |
|---|---|---|---|---|---|---|---|
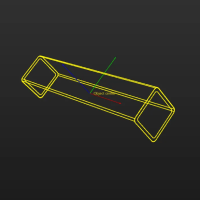
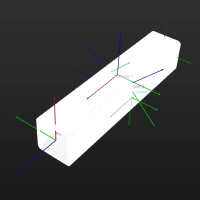
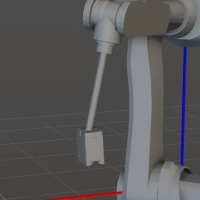
鋼塊(角型) |
基本幾何立体 |
STLファイルをインポート |
|
|
把持位置姿勢を手動ドラッグ&ドロップ、複数の把持位置姿勢を設定、把持位置姿勢の配列を設定、把持範囲を設定 |
|
|
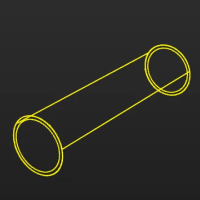
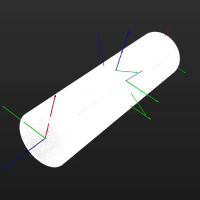
鋼塊(円形) |
基本幾何立体 |
STLファイルをインポート |
|
|
把持位置姿勢を手動ドラッグ&ドロップ、複数の把持位置姿勢を設定、把持位置姿勢の配列を設定、把持範囲を設定 |
|
|
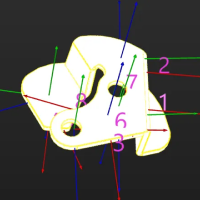
板金部品 |
薄板で、表裏を区別する必要あり |
STLファイルをインポート |
|
|
把持位置姿勢を手動ドラッグ&ドロップ、複数の把持位置姿勢を設定、把持範囲を設定 |
|
|
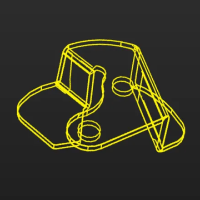
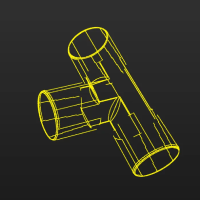
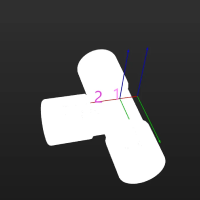
三方弁 |
小型ワーク |
STLファイルをインポート |
|
|
把持位置姿勢を手動ドラッグ&ドロップ、複数の把持位置姿勢を設定、把持範囲を設定 |
|
|
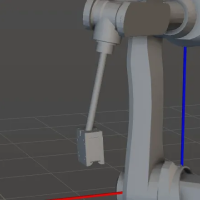
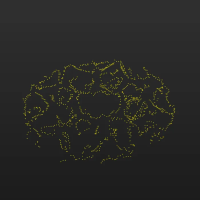
鉄芯 |
反射性を持つワーク |
カメラによる点群取得 |
|
|
把持位置姿勢を手動ドラッグ&ドロップ |
|
- |
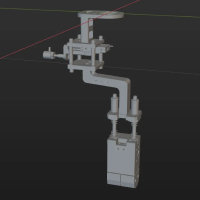
細長いワーク |
細く長い形状を持つ大型ワーク |
カメラによる点群取得 |
|
|
把持位置姿勢を手動ドラッグ&ドロップ |
|
|