衝突モデルを設定
プロジェクト構築段階で衝突モデルのサイズを調整して、衝突検出をより正確かつ効率的に行います。
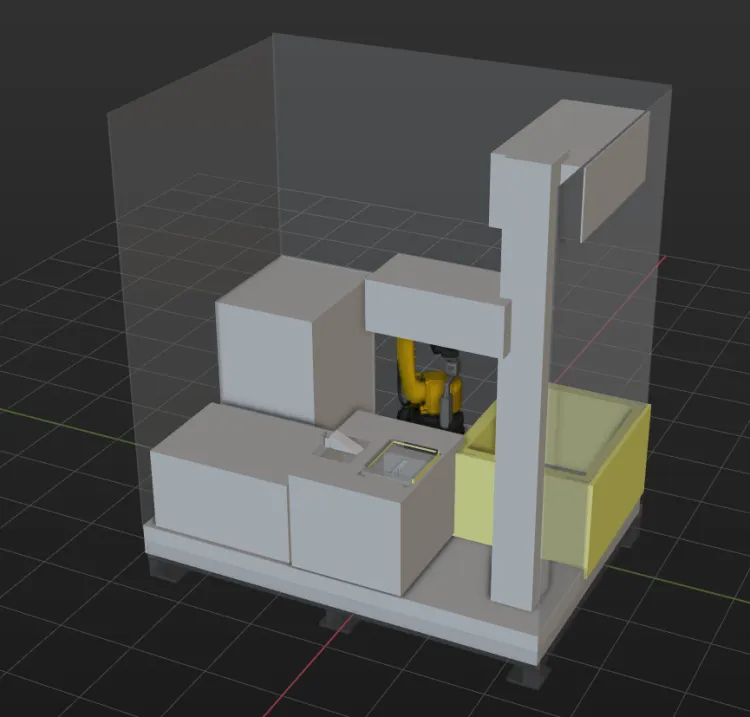
シーンのモデル
ソフトウェア内でシーンの物体のモデルを追加することで、実際のシーンを再現し、衝突のないロボットの移動経路を計算しやすくします。
シーンモデルの追加は、以下の要件を満たす必要があります。
-
完全性:ロボットの到達可能な範囲内のすべての物体に対して、可能な限りシーンモデルを完全に追加し、潜在的な衝突リスクを回避します。
-
正確性:シーンモデルの位置姿勢やサイズが正確でない場合、衝突の過検出や見逃し検出が発生する可能性があります。
-
安全範囲の確保:ロボットの安全な動作を確保するため、必要に応じて関連する物体のモデルサイズを大きく設定します。特に把持位置姿勢付近など、衝突検出の精度が高く求められる場所では、計算の失敗を防ぐために、シーンモデルを実際のサイズに近づける必要があります。一方、衝突検出精度は低くても、高い動作安全性が必要な場所(ETHシーンのカメラモデルなど)では、シーンモデルに十分な安全範囲を設ける必要があります。
-
モデルの簡略化:モデルは必要に応じて簡略化する必要があります。シーンモデルに詳細なディテールが多すぎる場合、衝突検出の精度向上には寄与せず、逆に検出の計算時間が大幅に増加する可能性があります。
シーンモデル構築の推奨方法は以下の通りです。
-
仮想空間では、衝突検出の効率を向上させるために、新たに長方体や円柱体を作成し、それらを外部モデルに重ねることを推奨します。
-
実際の安全柵フェンスがない場合、直方体のシーンの物体を作成して壁をシミュレーションすることが可能です。衝突検出を有効にすると、ロボットの動作範囲がセルを超えないように効果的に防止できます。
-
手動でロボットをセル内の物体に近づけ、Mech-Vizソフトウェア内でロボットの位置姿勢を同期させることを推奨します。これにより、ロボットが作成されたシーンモデルと衝突しているかどうかを確認できます。
-
シーンの物体を作成する際、安全範囲として少なくとも5mmを確保することをお勧めします。
-
直方体、箱、円柱型のシーンの物体が外部モデルと重なっている場合は、シーンの物体設定 ウィンドウで 衝突検出に使用する のチェックを外し、外部モデル の衝突を検出しないようにします。衝突検出は、長方形、箱、円柱型のシーンの物体に対してのみ有効になります。
| カメラの外部パラメータがキャリブレーションされたセルについては、点群とモデルが重なっているかを確認するために画像を撮影し、モデルの正確性を確保することができます。 |

箱モデル
箱 タイプのシーンモデルをMech-Vizで作成するか、外部モデル をインポートして衝突検出に使用できます。これら2つのモデルタイプにはそれぞれ異なる利点と欠点があります。
-
箱型のシーンモデルを作成
-
利点:モデルのサイズを手動で調整でき、衝突検出をより厳密に設定可能です。厚さの推奨値は5mmで、特に立方体の箱を使用する場合に推奨されます。
-
欠点:実際の箱は一般的に標準的な直方体ではないため、作成された箱モデルと実際の箱との間に誤差が生じる可能性があります。箱モデルが実際の箱を囲む場合、箱の壁付近のワークが箱モデルに埋まってしまい、切り取り率が低下する可能性があります。一方、実際の箱がモデルを囲む場合、ワークの把持中に箱の壁にぶつかる可能性があります。
-

-
箱の外部モデルをインポート
-
利点:外部モデルは実際の箱に近い形状を持っており、箱の側壁付近のワークを把持する際に誤検出の問題が発生しません。不規則な形状を持つ箱を使用する場合に推奨されます。
-
欠点:加工誤差や変形により、実際の箱とインポートした外部モデルの間に誤差が生じる可能性があります。この場合、衝突の見逃し検出や過検出が発生することがあります。
-
現場の箱の位置姿勢が固定でない場合、衝突検出の信頼性を確保するためには、ビジョン認識を使用して箱の正確な位置姿勢を認識し、仮想空間内で箱のシーンモデルの位置姿勢を適切に調整する必要があります。詳細については、Mech-Vizでコンテナの位置姿勢を更新する方法 をご参照ください。
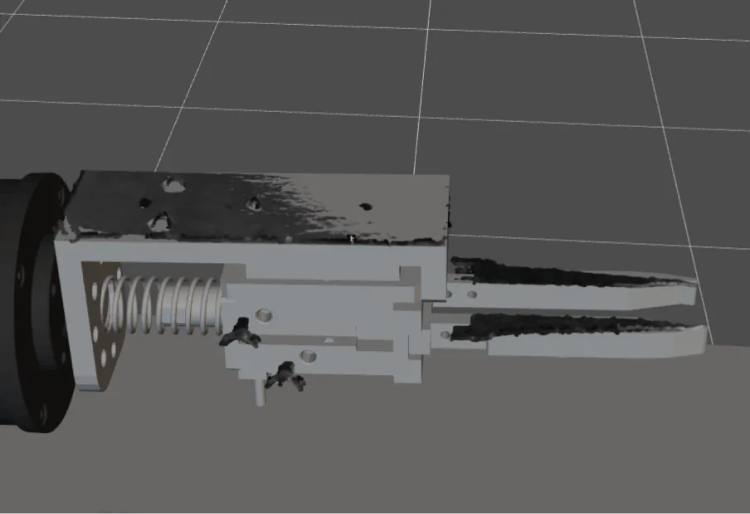
ロボットハンドモデル
バージョン2.0.0では、ロボットハンドの衝突モデルはOBJ形式とSTL形式に対応しています。OBJ形式を優先して使用することを推奨します。
STLモデルは中空であるため、システムは点群衝突検出の際にその外表面との衝突のみを検出でき、衝突の深刻度を正確に評価するのが難しいです。また、STLモデルに対して安定した衝突しきい値を設定することも困難です。それに対して、OBJモデルは実体であるため、ロボットハンドの衝突検出にはより適しています。
STL形式のロボットハンドモデルを使用する場合、ワークとシーンの物体との衝突検出用の点群として 点群柱 を使用することを推奨します。この場合、ワークとシーンの物体の衝突モデルは実体と同等となり、見逃し検出の発生を減少させることができます。
OBJ形式のロボットハンドモデルを作成
STLまたはSTEPモデルを基にして凸包を作成し、それをOBJ形式に変換するための モデルエディタ を使用できます。ロボットハンドモデルを作成する際、衝突モデルの作成時間を短縮するため、凸包作成時にモデルを完全に再現する必要はありません。実際の状況に応じて、一部のディテールを省略することが可能です。
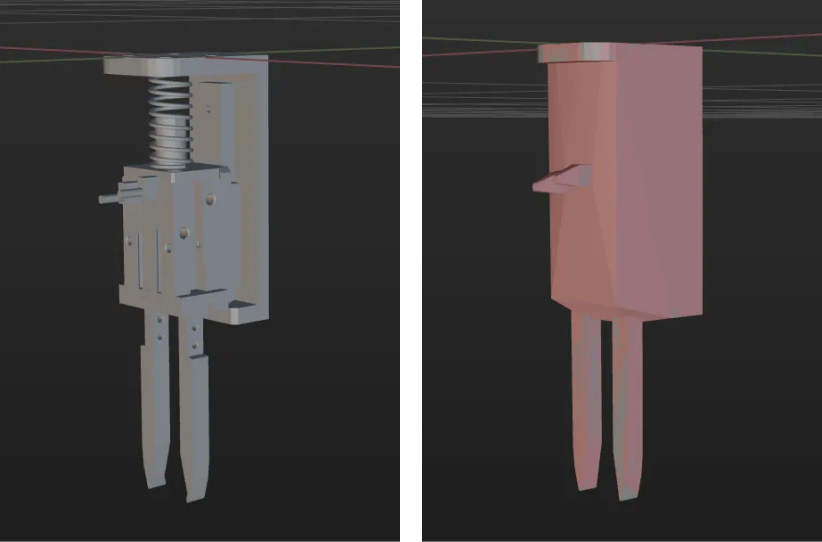
モデルの簡略化
-
ロボットハンドの指先部分は高い精度が求められるため、実物に近い形状で再現することが重要です。そのため、モデルを作成する際には細部まで作成する必要があります。これにより、衝突検出の精度と経路計画の成功率を確保できます。
-
一方で、指先から離れた機械部分に関しては、簡略化した形状にすることで、効率を向上させることができます。この場合、複雑な構造を囲む直方体の凸包で代替することができます。
ロボットハンドモデルのチェック
カメラの外部パラメータが既にキャリブレーションされているセルでは、ロボットハンドの点群とモデルが一致しているかを確認するために、撮影してチェックすることが推奨されます。