点群モデルと把持位置姿勢の紹介
点群モデルと把持位置姿勢を作成する前に、点群モデルと把持位置姿勢とは何か、そしてこれらが点群モデルのマッチングプロセスでそれらが果たす役割を理解する必要があります。
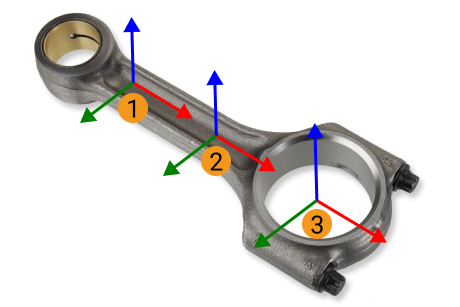
点群モデルとは
マッチングプロセスにおいて、点群モデルはワークの形状、構造、特徴などを反映することができる事前に定義された点群を指します。これにより、入力された点群とマッチングを行い、最適な対応関係を見つけ出し、最終的に目標ワークを得ます。
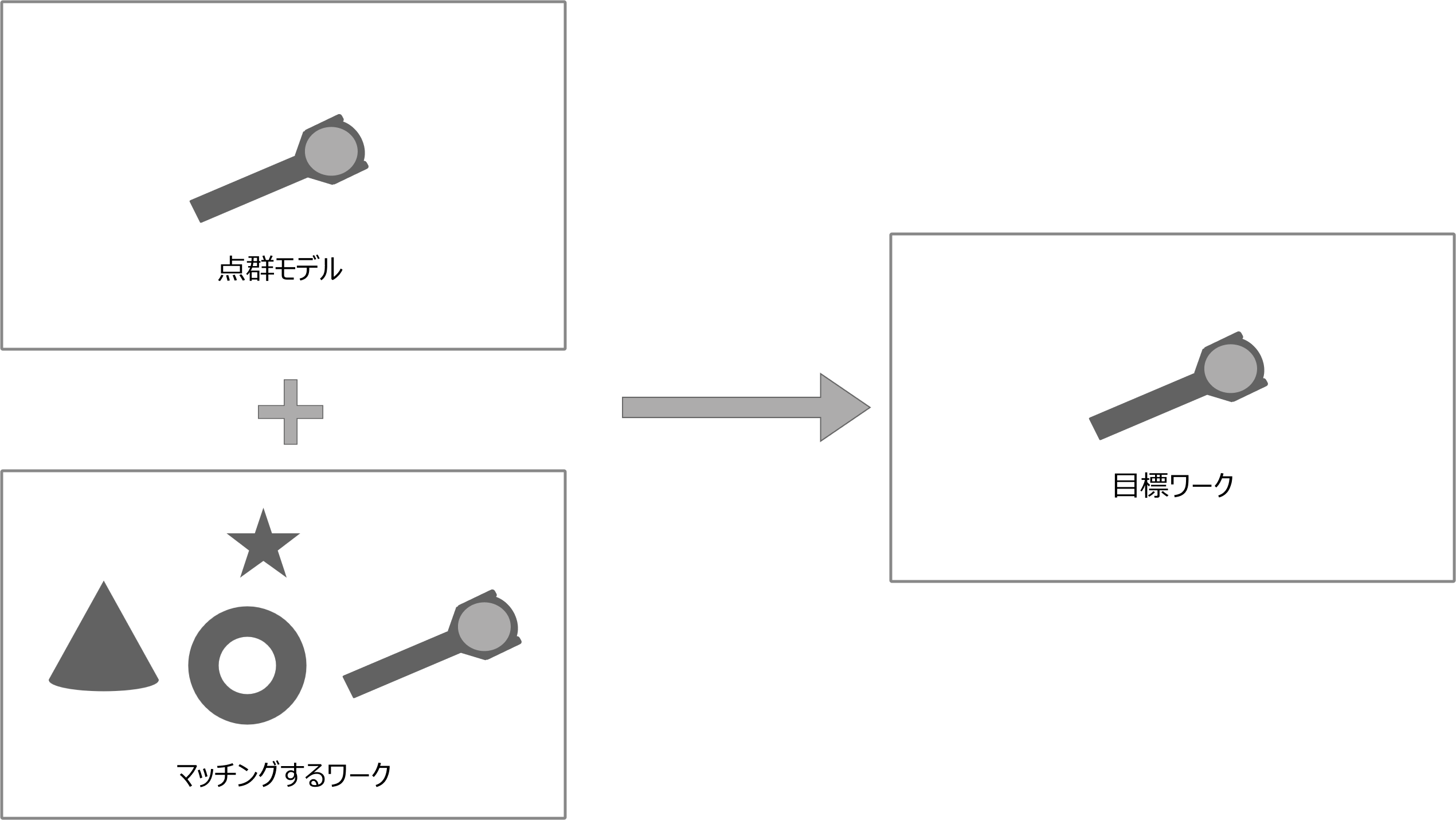
下図に示すように、点群モデルを用いて認識するワークとマッチングを行い、目標ワークを得ます。
点群モデルはワーク全体を記述することも、ワークの一部のみを記述することもできます。マッチングプロセスで点群モデルをより効果的に活用するためには、次のような要件を満たす必要があります。
-
点群モデルに含まれる点群は、マッチング速度に影響を与えないように、点群が均等に分布し、数量が適切である必要があります。
-
点群モデルは、マッチングプロセスでワークを正確に認識できるように、ワークの代表的な特徴を含んでいる必要があります。
-
点群モデルは、マッチングの安定性と精度を確保するために、不要な点群などの干渉要因を除去する必要があります。