位置姿勢を調整(コンテナ中心までの距離)
まず「コンテナ中心までの距離」の適用シーンと適用例を紹介し、「位置姿勢を調整(コンテナ中心までの距離)」のサンプルプロジェクトを例にとって、実践ガイドを提供します。次に、位置姿勢を一括調整(V2) ステップのパラメータ調整方法を説明し、最後に実際の適用時の注意事項を紹介します。
適用例
以下では、トラックリンクの把持を例にとり、「位置姿勢を調整(コンテナ中心までの距離)」のサンプルプロジェクトを使用して、まずワークを位置姿勢からコンテナ中心までの距離に基づいてソートし、その後把持します。
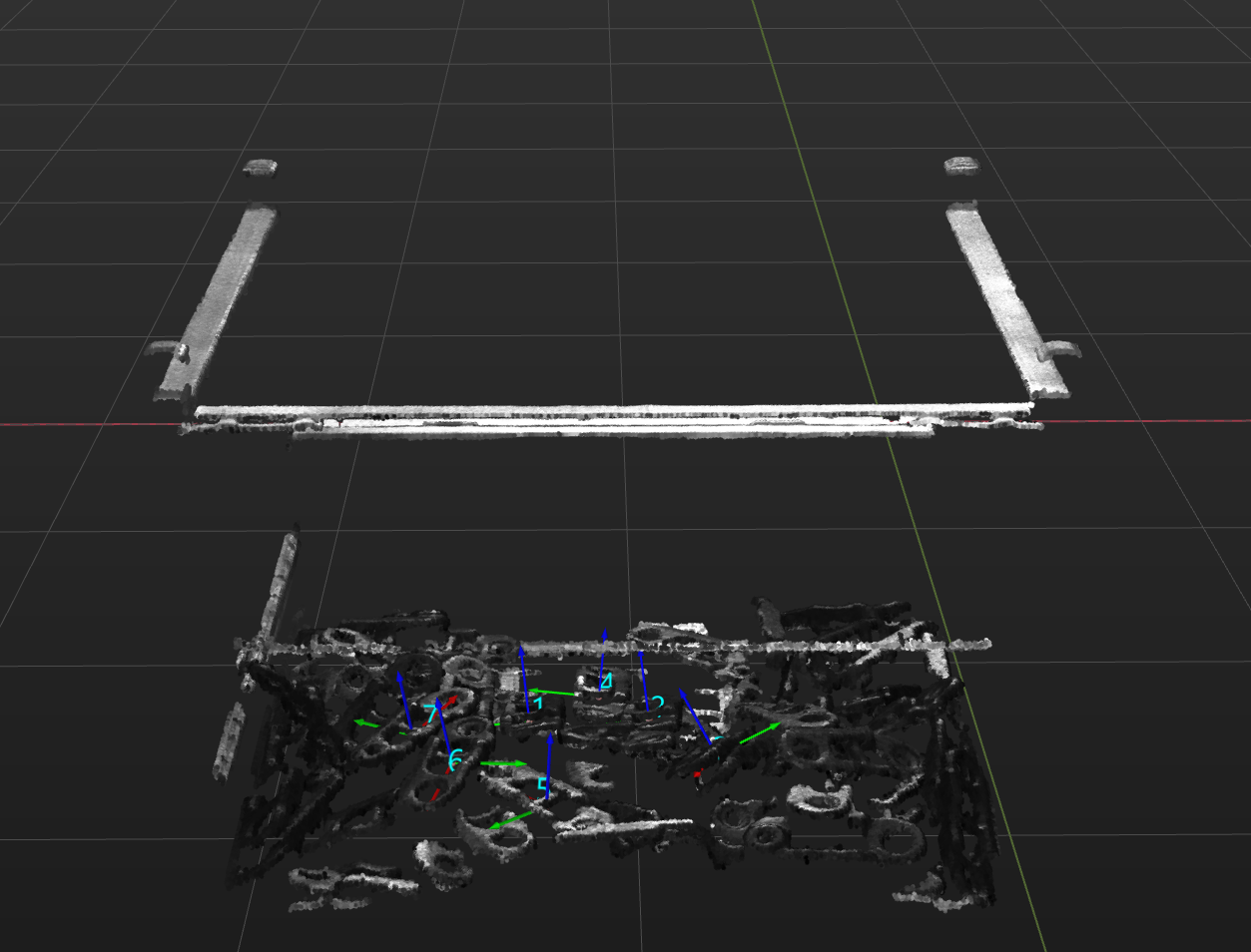
ロボットがトラックリンクを把持したときの効果を下図に示します。

以下は、この例に基づいた実践ガイドと注意事項の説明です。
実践ガイド
適用シーンを理解した後、それを使用する必要がある場合は、ソリューションライブラリから関連プロジェクトをダウンロードし、以下の内容を参考にしてパラメータの調整方法を学んでください。
「位置姿勢を調整(コンテナ中心までの距離)」のプロジェクトはMech-Visionのソリューションライブラリにあり、実践例からダウンロードして使用できます。プロジェクトを作成した後、位置姿勢を一括調整(V2) ステップを選択し、設定ツール ボタンをクリックして、位置姿勢編集ツール を開きます。位置姿勢調整、位置姿勢処理ルール、共通設定の3つの手順が含まれます。

-
位置姿勢調整:位置姿勢の向きを調整します。
-
位置姿勢処理ルール:実際の要件に基づいて位置姿勢をソートし、要件を満たしていない位置姿勢を除去します。
-
共通設定:位置姿勢処理以外の設定を行い、位置姿勢と1対1に対応する他のデータ(箱の寸法など)を再ソートすることができます。
以下は、各手順の主要なパラメータの説明です。
位置姿勢調整
-
方向の調整方式を選択します。
対象物の位置姿勢を自動的にZ軸上向きにするため、方向調整 を 自動合わせ に設定することを推奨します。
その他の方向調整方式については、位置姿勢の方向を調整 をご参照ください。
-
適用シーンを選択します。
位置姿勢のZ軸方向をできるだけ統一し、ソートを容易にするために、適用シーン を Z軸方向合わせ(部品供給) に設定します。
上記の設定が完了したら、次へ をクリックして位置姿勢処理ルールの画面に入ります。
位置姿勢処理ルール
-
ソート方法を選択します。
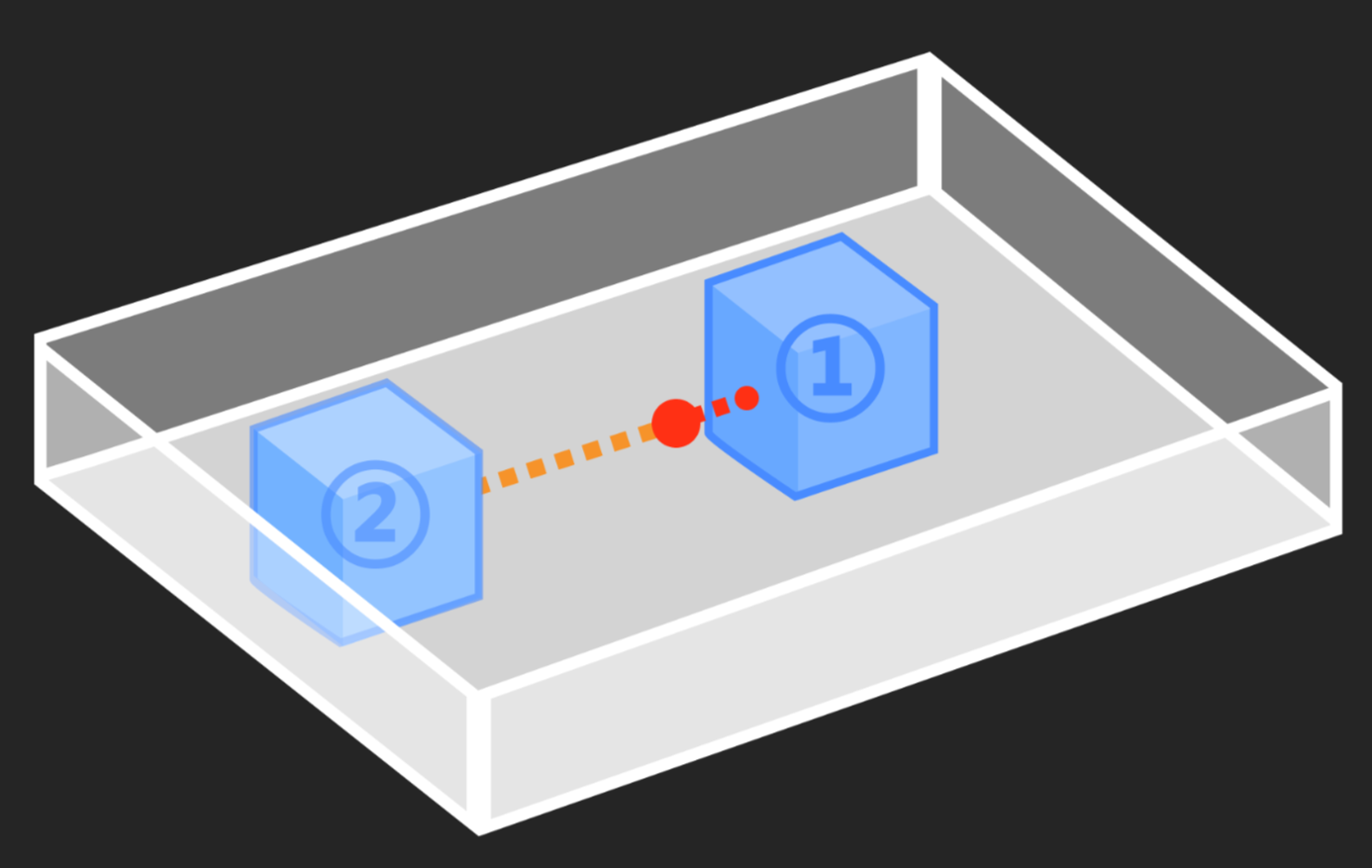
位置姿勢から基準位置姿勢までの距離でソート を選択します。
-
基準位置姿勢を設定します。
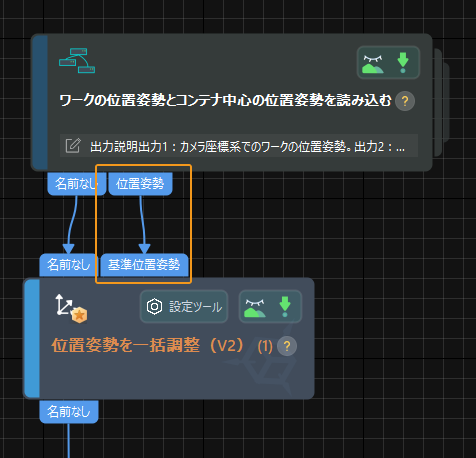
この基準位置姿勢は、把持の開始位置を確認するために使用されます。基準位置姿勢の設定方法については、基準位置姿勢の設定 をご参照ください。このプロジェクトでは、コンテナ中心に近いワークを先に把持し、その後コンテナの側壁に近いワークを把持するため、基準位置姿勢を 外部ステップによる入力 に設定する必要があります。つまり、ワークの位置姿勢とコンテナ中心の位置姿勢を読み込む ステップの組合せによって出力された位置姿勢を基準位置姿勢として使用します。
-
ソート順序を選択します。
昇順 を選択します。
上記の設定が完了したら、次へ をクリックして共通設定の画面に入ります。
注意事項
実際のアプリケーションでは、以下の注意事項に従った上で、プロジェクトに 位置姿勢を一括調整(V2) ステップを追加し、データフローを接続してください。
-
位置姿勢を一括調整(V2) ステップの前に、ワークの位置姿勢およびコンテナ中心の位置姿勢を認識し出力するためのステップやステップの組合せ(ワークの位置姿勢とコンテナ中心の位置姿勢を読み込む など)を接続する必要があります。これらのステップまたはステップの組合せの位置姿勢出力ポートは、位置姿勢を一括調整(V2) ステップの位置姿勢入力ポートに接続して、位置姿勢のソートを行います。
-
位置姿勢を一括調整(V2) ステップの後に、位置姿勢入力の関連ステップ(経路計画 や 出力 ステップなど)を接続する必要があります。これにより、調整された位置姿勢が出力され、ロボットが位置姿勢からコンテナ中心までの距離に基づいてトラックリンクを把持できるようになります。