【3D ビジョンによるガイド】小型ワークの高精度分割モデルのトレーニング
3D ビジョンによるクランクシャフト供給のプロジェクトを例に、視野が広くてワークサイズが小さいシーンンにおいて、樹形モジュール群を使用して高精度なモデルをトレーニングする方法を紹介します。
トレーニング手順
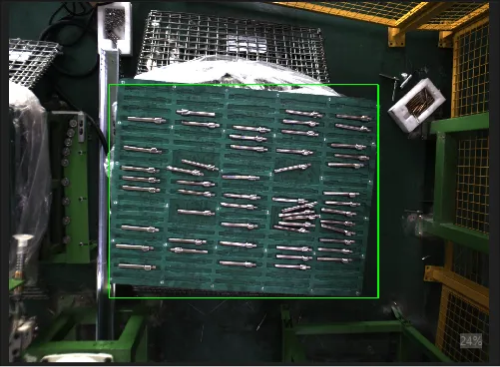
クランクシャフト自動供給は、ロボットをガイドしてトレイからバラ積みワークを認識・把持します。樹形モジュール群を使用して以下の3つの手順を実現できます。
-
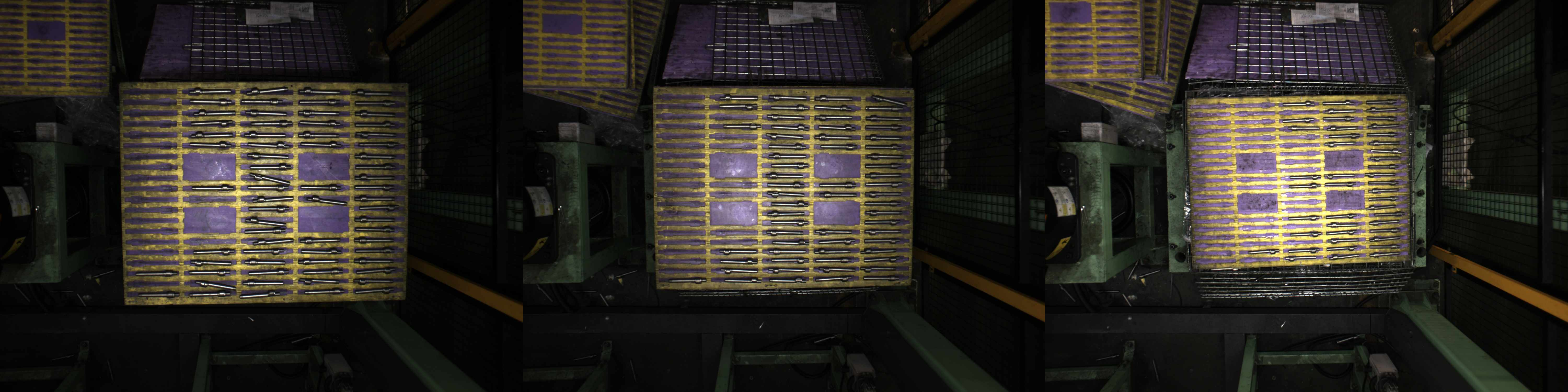
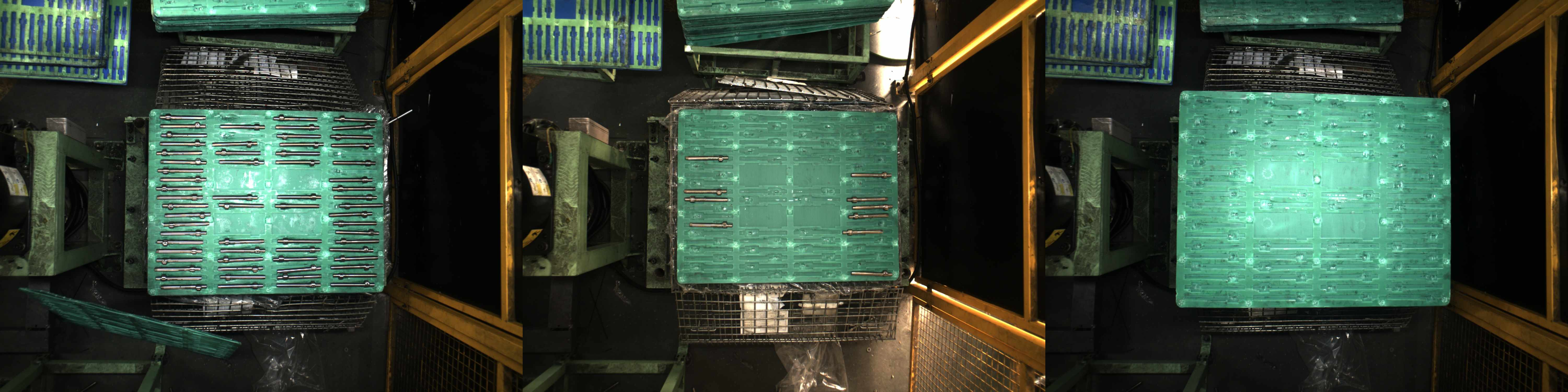
対象物検出モジュールを使用してクランクシャフトが配置されたトレイを位置決めます。
-
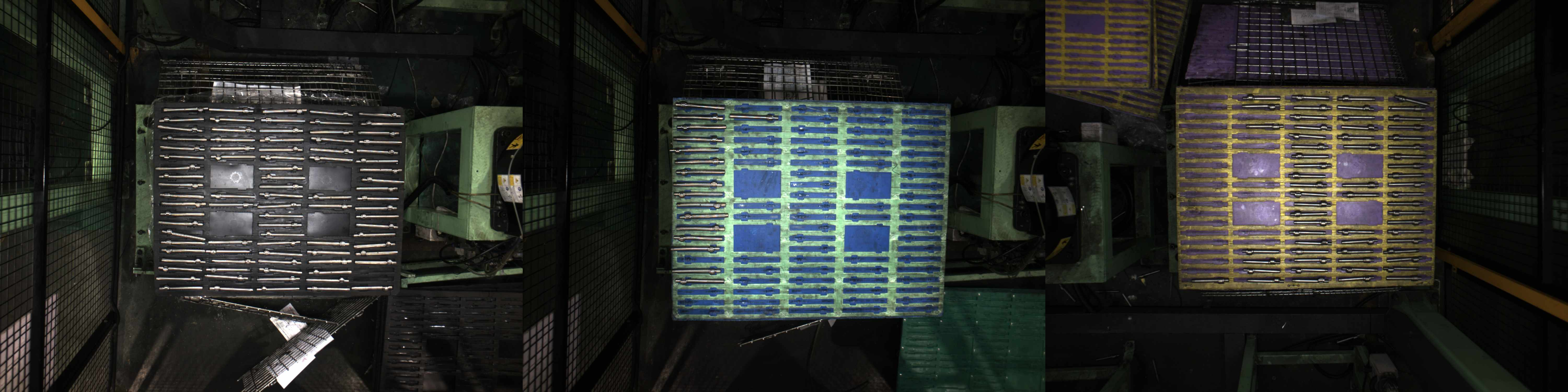
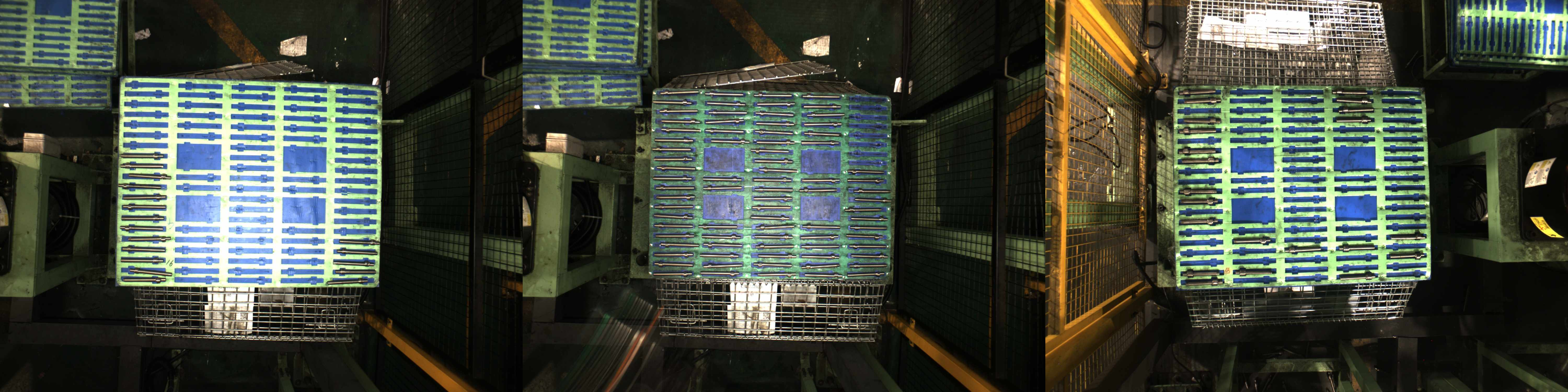
インスタンスセグメンテーションモジュールを使用してクランクシャフトを分割します。
-
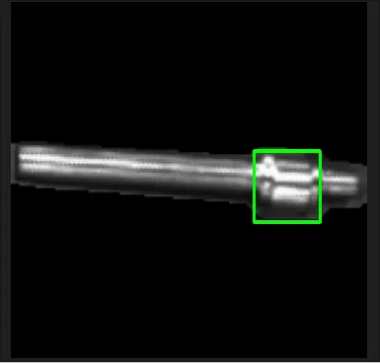
対象物検出モジュールを使用してクランクシャフトの大きい端を位置決めます。
高精度のモデルを取得するために、各モジュールの機能を利用して段階的にデータを収集してラベルを付けます。