Le système de vision n’a produit aucun résultat
Cette section présente les problèmes liés à l’absence de résultats du système de vision et propose des solutions.
Les problèmes d’absence de résultats du système de vision surviennent souvent conjointement avec d’autres dysfonctionnements. Veuillez traiter ces problèmes en fonction des symptômes observés.
Erreur de capture d’image
| Symptôme | Solutions |
|---|---|
Les caméras ne sont pas détectées par Mech-Eye Viewer. |
Veuillez consulter Caméra non détectée pour le dépannage. |
Mech-Vision ne peut pas capturer d’images avec la caméra détectée par Mech-Eye Viewer. |
Veuillez consulter Mech-Vision ne peut pas capturer d’images avec la caméra détectée par Mech-Eye Viewer pour le dépannage. |
La caméra se déconnecte occasionnellement durant une production stable. |
Veuillez consulter Déconnexion occasionnelle de la caméra pour le dépannage. |
La perte de nuage de points désigne le phénomène ponctuel où le nuage de points acquis présente des parties manquantes. |
Veuillez consulter Perte du nuage de points pour le dépannage. |
Le temps d’acquisition d’image est trop long. |
Veuillez consulter Temps d’acquisition d’image trop long pour le dépannage. |
Aucun nuage de points dans la ROI 3D
Symptôme:
Le système de vision n’a pas envoyé de résultats au robot ou au PLC, et il n’y avait aucun nuage de points dans la ROI 3D.
Les étapes courantes de la configuration de la ROI 3D incluent : « Reconnaissance de l’objet cible 3D », « Extraire les points 3D dans la ROI 3D »
Cause possible:
Paramètres de ROI 3D inappropriés.
Solution:
Veuillez consulter Définir correctement la ROI 3D.
Aucun résultat de l’inférence d’apprentissage profond
Symptôme:
Lorsque l’étape « Inférence du paquet de modèle d’apprentissage profond » est utilisée dans le projet Mech-Vision, le résultat de l’inférence est nul.
Cause possible:
Le seuil de confiance est réglé trop élevé.
Solution:
Dans l’onglet Paramètres de l’étape de l’étape « Inférence du paquet de modèle d’apprentissage profond », diminuez la valeur du paramètre Seuil de confiance de la segmentation par instance.
Si le problème persiste, veuillez contacter le Support technique.
Aucun résultat d’appariement 3D
Symptôme:
Aucun résultat d’appariement pour les étapes liées à l’appariement 3D ou l’étape « Reconnaissance de l’objet cible 3D ».
Causes possibles:
-
L’étape n’a pas d’entrée de nuage de points.
-
Le seuil de confiance de l’étape « Appariement fin 3D » ou « Reconnaissance de l’objet cible 3D » est défini trop élevé, ce qui entraîne le filtrage de tous les résultats d’appariement.
-
Les matériaux entrants ont changé, et le modèle de nuage de points de l’objet cible ne correspond pas à l’objet cible réel à apparier.
Solution:
Veuillez résoudre le problème en suivant les étapes suivantes:
-
Dans Mech-Vision, double-cliquez sur le flux de données au-dessus des étapes liées à l’appariement 3D ou « Reconnaissance de l’objet cible 3D », et vérifiez la fenêtre Sortie de débogage pour voir s’il y a des données de nuage de points.
-
Si oui, veuillez exécuter l’étape suivante.
-
Si non, veuillez consulter Paramètres de ROI 3D inappropriés pour le dépannage ou vérifier si les paramètres de clustering et de filtrage sont mal configurés, ce qui pourrait entraîner le filtrage du nuage de points de l’objet cible.
-
-
Sélectionnez l’étape « Appariement fin 3D » ou « Reconnaissance de l’objet cible 3D », abaissez son seuil de confiance et exécutez l’étape seule. Vérifiez ensuite s’il y a des résultats d’appariement dans la fenêtre Sortie de débogage.
-
Si oui, veuillez exécuter l’étape suivante.
-
Si non, veuillez contacter le Support technique.
-
-
Dans la fenêtre Sortie de débogage, vérifiez si le nuage de points de l’objet à apparier est cohérent avec le modèle de nuage de points.
-
Si oui, le dépannage est terminé.
-
Si non, veuillez recréer un modèle de nuage de points pour l’objet cible et modifier le modèle appelé par les étapes.
-
Expiration du délai d’exécution du projet Mech-Vision
Symptôme:
Le système de vision n’a pas envoyé de résultats au robot ou au PLC, et l’onglet Console du panneau de journal de Mech-Vision affiche « [1019] : Mech-Vision délai d’exécution dépassé ».
Solution:
Veuillez résoudre le problème en suivant les étapes suivantes:
-
Veuillez vérifier si le disque de l’IPC est plein.
-
Si oui, veuillez nettoyer le disque rapidement puis exécuter l’étape suivante.
-
Si non, veuillez exécuter l’étape suivante.
-
-
Veuillez consulter Code d’erreur 1019 pour le dépannage.
-
Si le problème persiste, veuillez contacter le Support technique.
Le fichier des paramètres extrinsèques est manquant ou endommagé
Symptôme:
Le contenu des fichiers de paramètres extrinsèques de la caméra (le fichier calibration/Camera ID/extri_param.json dans le répertoire du projet Mech-Vision) est manquant.
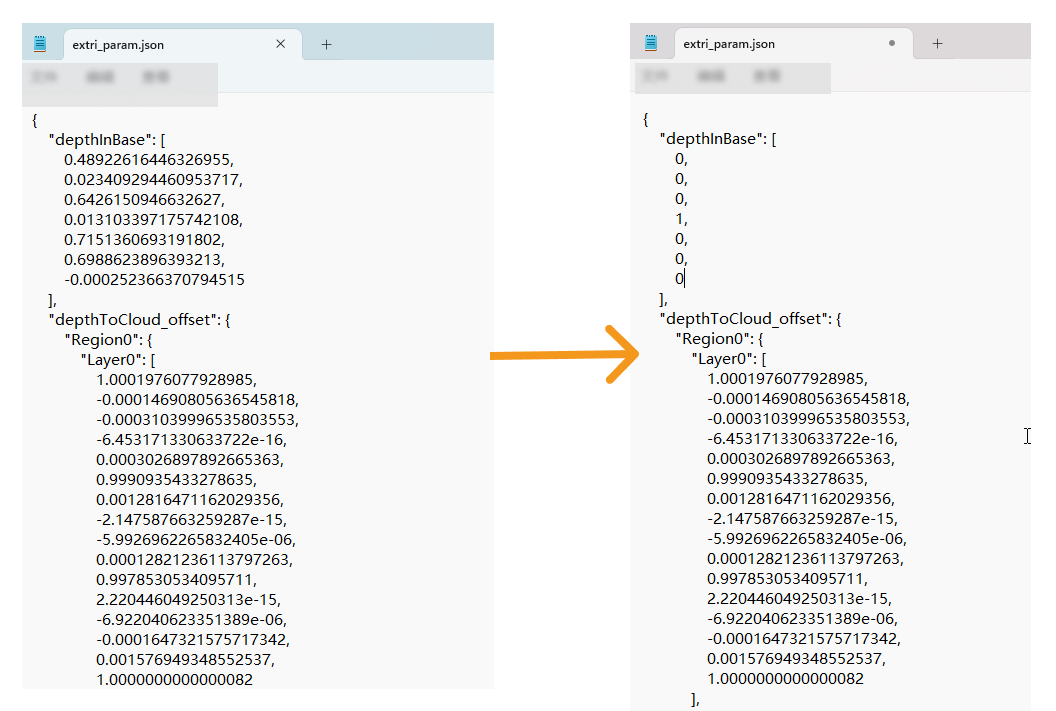
Cause possible:
Une panne de courant inattendue de l’IPC a entraîné la perte du contenu du fichier de paramètres extrinsèques.
Solution:
Veuillez le restaurer à l’aide des fichiers de paramètres extrinsèques de sauvegarde, ou consultez Recalibrage main-œil.
Le flux de données entre les étapes est interrompu
Symptôme:
Suite à des mises à niveau logicielles, des pannes de courant ou des manipulations incorrectes, les connexions de flux de données entre les étapes peuvent être interrompues.
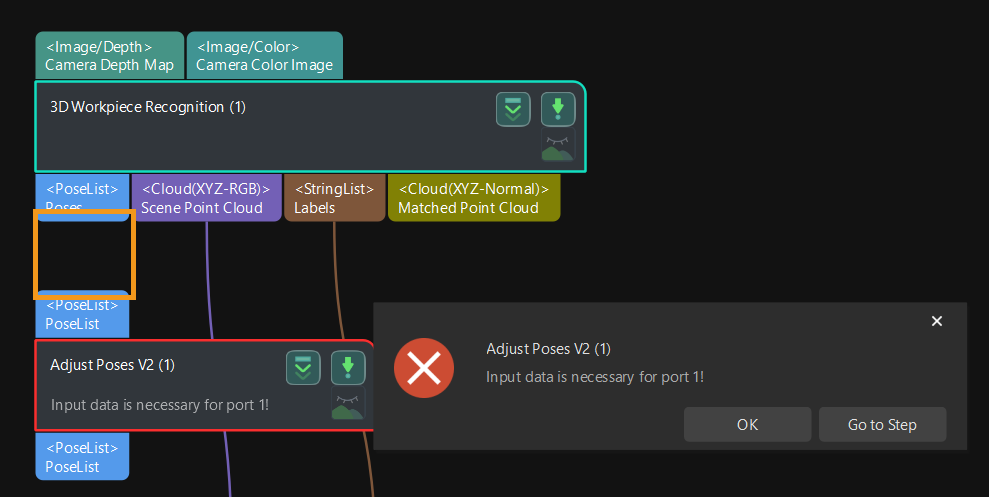
Solution:
Reconnectez les ports entre les étapes.
Mech-Vision se bloque ou manque de mémoire
Symptôme:
En raison d’un manque de mémoire sur l’IPC, les problèmes suivants peuvent survenir:
-
Le message d’erreur « bad allocation » est enregistré dans le panneau de journal de Mech-Vision.
-
Mech-Vision ne répond plus pendant une période prolongée.
-
Mech-Vision se bloque.
Solution:
-
Si « bad allocation » est enregistré dans le journal, veuillez consulter Mémoire insuffisante pour le dépannage.
-
Vérifiez si le modèle de l’objet cible est trop volumineux et n’a pas été sous-échantillonné. Le cas échéant, essayez de recréer un modèle de nuage de points et sous-échantillonnez correctement le nuage de points pour réduire la charge de calcul.
-
Redémarrez régulièrement l’IPC. Il est recommandé de le faire une fois par semaine.
Le robot ne peut pas atteindre le point de passage
Symptôme:
Le robot ne peut pas atteindre le point de passage et des journaux d’erreur sont générés.
-
Si le projet utilise Mech-Vision pour la planification de trajectoire, alors « [1030] Mech-Vision : Le robot ne peut pas atteindre le point de passage » sera enregistré dans l’onglet Console du panneau de journal de Mech-Vision.
-
Si le projet utilise Mech-Viz pour la planification de trajectoire, alors « [2004] Mech-Viz : Le robot ne peut pas atteindre le point de passage » sera enregistré dans l’onglet Console du panneau de journal de Mech-Vision.
Solution:
Veuillez consulter Code d’erreur 1030 ou Code d’erreur 2004 pour le dépannage. Si le problème persiste, veuillez contacter le Support technique.
Expiration du délai d’exécution du projet Mech-Viz
Symptôme:
Le système de vision n’a pas envoyé de résultats au robot ou au PLC, et l’onglet Console du panneau de journal de Mech-Vision affiche « [2025] Mech-Viz : Délai d’exécution dépassé ».
Solution:
Veuillez résoudre le problème en suivant les étapes suivantes:
-
Veuillez vérifier si le disque de l’IPC est plein.
-
Si oui, veuillez nettoyer le disque rapidement puis exécuter l’étape suivante.
-
Si non, veuillez exécuter l’étape suivante.
-
-
Veuillez consulter Code d’erreur 2025 pour le dépannage.
-
Si le problème persiste, veuillez contacter le Support technique.
Mech-Viz: Aucun résultat de vision reçu du service de vision
Symptôme:
Le système de vision n’a pas envoyé de résultats au robot ou au PLC, et l’onglet Console du panneau de journal de Mech-Vision affiche « [2037] Mech-Viz : Aucun résultat de vision reçu du service de vision ».
Solution:
Veuillez consulter Code d’erreur 2037 pour le dépannage. Si le problème persiste, veuillez contacter le Support technique.
Mech-Viz: Erreur de singularité de mouvement
Symptôme:
Le système de vision n’a pas envoyé de résultats au robot ou au PLC, et l’onglet Console du panneau de journal de Mech-Vision affiche « [2020] Mech-Viz : Erreur de singularité de mouvement ».
Solution:
Veuillez consulter Code d’erreur 2020 pour le dépannage. Si le problème persiste, veuillez contacter le Support technique.
Mech-Viz: Collision du robot détectée
Symptôme:
Le système de vision n’a pas envoyé de résultats au robot ou au PLC, et l’onglet Console du panneau de journal de Mech-Vision affiche « [2031] Mech-Viz : Collision du robot détectée ».
Solution:
Veuillez consulter Code d’erreur 2031 pour le dépannage. Si le problème persiste, veuillez contacter le Support technique.