Modifier manuellement pour définir des points de préhension
Lorsque vous souhaitez définir des points de préhension par édition manuelle, le flux de configuration global est le suivant.

-
Importer les informations du projet : sélectionnez le projet et la source du nuage de points, et le modèle de nuage de points peut être généré automatiquement.
-
Modifier le modèle : modifiez le modèle de nuage de points généré, y compris le calibrage du point central de l’objet et la configuration du modèle de nuage de points, afin d’assurer de meilleures performances de l’appariement 3D.
-
Définir le point de préhension : ajoutez des points de préhension ou le tableau de points de préhension sur le modèle de nuage de points modifié.
-
Définir le modèle de collision (optionnel) : générez le modèle de collision pour la détection de collision pendant la planification de trajectoire.
Les sections suivantes fournissent des instructions détaillées sur la configuration.
Importer les informations du projet
Configurer les paramètres du projet
Pour obtenir les informations à partir du projet, sélectionnez le projet correspondant, le port de l’Étape qui produit le nuage de points de surface/d’arête, et le repère de référence pour définir le nuage de points. Cliquez ensuite sur Aperçu pour afficher le modèle de nuage de points dans la zone de visualisation à gauche.
|
Lors du choix du repère de référence pour définir le nuage de points, assurez-vous qu’il correspond au repère de référence du nuage de points de la scène utilisé dans l’Étape d’appariement 3D ultérieure. |
Les informations du projet ont maintenant été importées. Cliquez sur Suivant pour modifier le modèle de nuage de points généré.
Modifier le modèle de nuage de points
Le modèle de nuage de points généré doit être modifié afin d’obtenir de meilleures performances lors de l’appariement 3D ultérieur.
Éditer le nuage de points
S’il existe des points d’interférence autour du modèle de nuage de points, vous pouvez les supprimer en éditant le nuage de points. Reportez-vous à Éditer le nuage de points pour des instructions détaillées.
Étalonner le point central de l’objet
Après le calcul automatique d’un point central d’objet, vous pouvez l’étalonner en fonction de l’objet cible réellement utilisé. Sélectionnez une méthode de calcul sous Étalonner le point central selon l’application, puis cliquez sur Commencer le calcul pour étalonner le point central de l’objet.
| Méthode | Description | Opération | Objet cible applicable |
|---|---|---|---|
Recalculer en utilisant le point central original |
Méthode de calcul par défaut. Calcule le point central de l’objet en fonction des caractéristiques de l’objet cible et du point central original de l’objet. |
Sélectionnez Recalculer en utilisant le point central original, puis cliquez sur le bouton Commencer le calcul. |
En général, cette méthode peut être utilisée pour calculer le point central de tous les objets cibles. |
Étalonner vers le centre de symétrie |
Calculez le point central de l’objet selon la symétrie de l’objet cible.
|
Sélectionnez Étalonner vers le centre de symétrie et cliquez sur le bouton Commencer le calcul. |
Cette méthode peut être utilisée pour calculer le point central de l’objet lors du filtrage des résultats de correspondance par la symétrie de l’objet cible. |
Étalonner vers le centre de la caractéristique |
Calculez le point central de l’objet selon le Type de caractéristique sélectionné et le ROI 3D défini. |
|
Objets cibles avec des caractéristiques géométriques évidentes
|

Configurer le modèle de nuage de points
Pour mieux utiliser le modèle de nuage de points dans la correspondance 3D ultérieure et améliorer la précision de correspondance, l’outil propose les deux options suivantes pour configurer le modèle de nuage de points. Vous pouvez activer la fonctionnalité Configurer le modèle de nuage de points selon les besoins.
Calculer des poses pour filtrer le résultat de correspondance
Une fois Calculer des poses pour filtrer le résultat de correspondance activé, davantage de tentatives de correspondance seront effectuées selon les paramètres afin d’obtenir des résultats de correspondance avec une confiance plus élevée. Toutefois, davantage de tentatives entraîneront un temps de traitement plus long.
Deux méthodes sont disponibles : Calcul automatique des poses improbables et Configurer la symétrie manuellement. En général, Calcul automatique des poses improbables est recommandé. Voir ci-dessous pour les détails.
| Méthode | Description | Opération |
|---|---|---|
Calcul automatique des poses improbables |
Les poses susceptibles d’entraîner des correspondances erronées seront calculées automatiquement. Lors des correspondances ultérieures, les poses qui réussissent à correspondre à ces poses seront considérées comme non qualifiées et filtrées. |
Notez que les résultats de calcul ne seront pas mis à jour automatiquement lorsque le modèle de nuage de points est modifié. En cas de modifications, veuillez cliquer de nouveau sur « Calculer les poses improbables » pour mettre à jour les résultats. |
Configurer la symétrie manuellement |
Calculez les poses potentiellement mal appariées sur la base des paramètres définis manuellement tels que l’Ordre de symétrie et la Plage d’angle. Lors des correspondances ultérieures, les poses qui réussissent à correspondre à ces poses seront considérées comme non qualifiées et filtrées. |
Sélectionnez l’axe de symétrie en vous référant à Symétrie de rotation des objets cibles, puis définissez l’Ordre de symétrie et la Plage d’angle. |
|
Lorsque cette fonctionnalité est activée, vous devez configurer les paramètres correspondants dans les étapes de correspondance ultérieures pour activer la fonctionnalité. Voir ci-dessous pour plus de détails.
|
Définir le gabarit de pondération
Lors de la reconnaissance de l’objet cible, la définition d’un gabarit de pondération met en évidence les caractéristiques clés de l’objet cible, améliorant la précision des résultats de correspondance. Le gabarit de pondération est généralement utilisé pour distinguer l’orientation de l’objet cible. Les procédures pour définir un gabarit de pondération sont les suivantes.
|
Un gabarit de pondération ne peut être défini que lorsque les Paramètres d’affichage du nuage de points sont définis sur Afficher uniquement le nuage de points de surface. |
-
Cliquez sur Éditer le gabarit.
-
Dans la zone de visualisation, maintenez le bouton droit de la souris enfoncé pour sélectionner une partie des caractéristiques de l’objet cible. La partie sélectionnée, c’est-à-dire le gabarit de pondération, se verra attribuer un poids plus élevé dans le processus de correspondance.
En maintenant Maj et le bouton droit de la souris enfoncés simultanément, vous pouvez définir plusieurs zones pondérées dans un seul modèle de nuage de points.
-
Cliquez sur Appliquer pour terminer la définition du gabarit de pondération.
|
Pour que le gabarit de pondération configuré prenne effet lors de la correspondance ultérieure, accédez au paramètre « Paramètres du modèle » de l’étape « 3D Matching », et sélectionnez le modèle avec un gabarit de pondération correctement défini. Ensuite, allez à « Filtrage des poses » et activez Prendre en compte la pondération dans la vérification du résultat. Le paramètre « Prendre en compte la pondération dans la vérification du résultat » apparaîtra après que le « Niveau de réglage des paramètres » est défini sur Expert. |
La modification du modèle de nuage de points est maintenant terminée. Vous pouvez cliquer sur Suivant pour définir le point de préhension pour le modèle de nuage de points.
Définir le point de préhension
Ajuster le point de prise
Par défaut, la liste des points de prise affiche les points de prise ajoutés, définis dans le repère dont l’origine est le point central de l’objet. La modification du point central de l’objet affectera les points de prise. Vous pouvez ajuster les points de prise par défaut ou ajouter de nouveaux points de prise.
-
Ajuster les points de prise par défaut
Si le point de prise généré automatiquement ne répond pas aux exigences de l’application, vous pouvez personnaliser les valeurs dans « Paramètres du point de prise » ou faire glisser manuellement le point de prise dans la zone de visualisation.
-
Ajouter de nouveaux points de prise
Si l’objet cible comporte plusieurs points de prise, cliquez sur le bouton Ajouter pour ajouter de nouveaux points de prise.
En prenant l’exemple des tubes carrés, le préhenseur magnétique peut saisir sur les côtés, les extrémités et les arêtes. Vous pouvez donc ajouter des points de prise à ces positions.
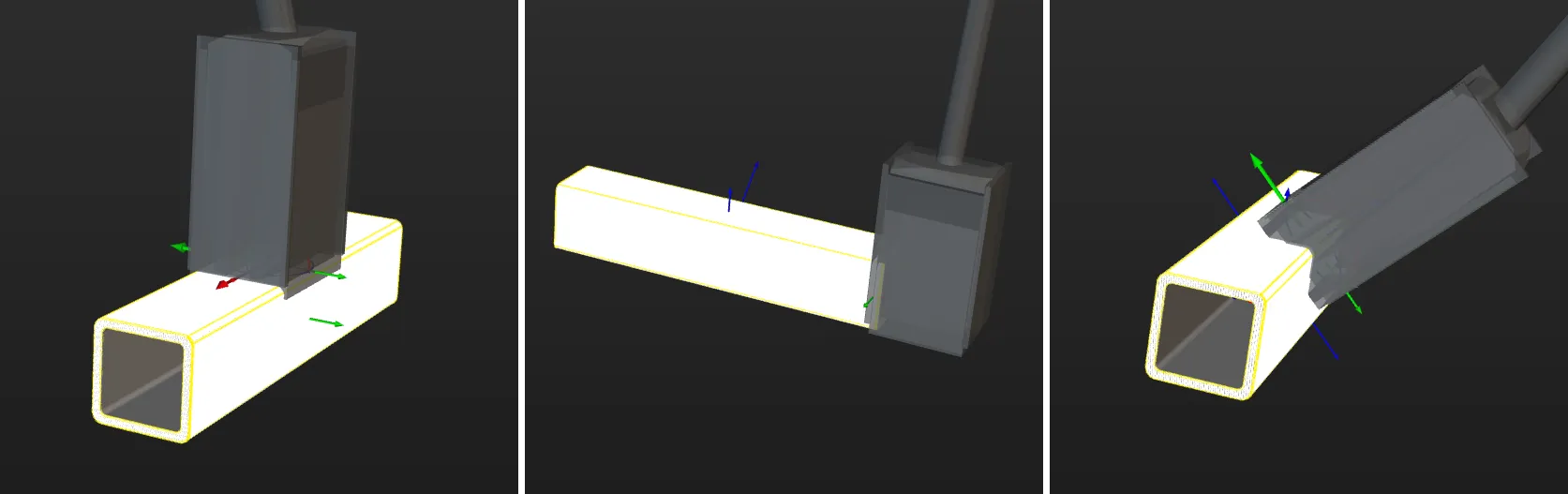
Après avoir ajouté des points de prise, vous pouvez faire glisser les points de prise dans la liste pour ajuster la priorité. Les points plus hauts dans la liste seront considérés en premier lors de la prise effective.
Définir le tableau de points de prise
Lorsque l’objet cible est symétrique, vous pouvez définir le tableau de points de prise basé sur le point central de l’objet selon les besoins réels. La définition du tableau de points de prise peut éviter les rotations inutiles de l’outil de bout du robot pendant la prise. Cela augmente le taux de réussite de la planification de trajectoire et réduit le temps nécessaire pour la planification de trajectoire, permettant au robot de se déplacer plus harmonieusement et rapidement. Les procédures de définition sont les suivantes.
-
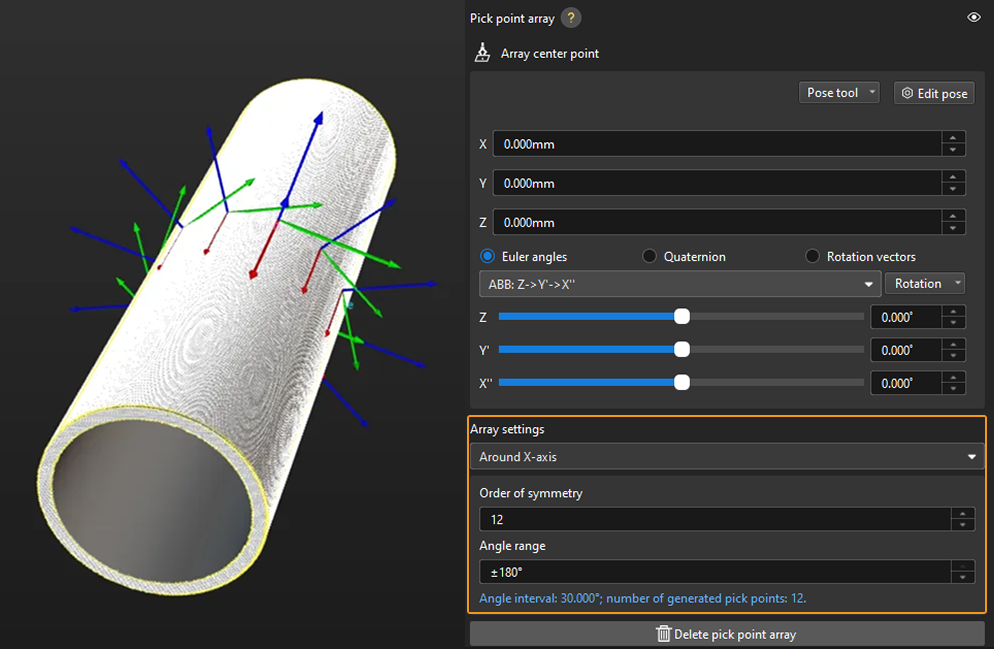
Sous « Paramètres du point de prise », cliquez sur Générer à côté de Tableau de points de prise.
-
Reportez-vous à Symétrie de rotation des objets cibles pour sélectionner l’axe de symétrie, puis définissez l’Ordre de symétrie et la Plage d’angle.
-
(Optionnel) Faire en sorte que le résultat de vision contienne des tableaux de points de prise.
Si désactivé, Mech-Viz ou l’outil de planification de trajectoire générera des tableaux de points de prise selon les paramètres de l’éditeur d’objet cible et planifiera la trajectoire en fonction des points de prise du tableau. Si activé, Mech-Vision produira des tableaux de points de prise selon les paramètres de l’éditeur d’objet cible, et Mech-Viz ou l’outil de planification de trajectoire utilisera les points de prise du tableau pour planifier la trajectoire.
-
Si vous souhaitez que les tableaux de points de prise soient générés et sortis avant la planification de trajectoire, vous devez activer cette option.
-
Si vous souhaitez que les tableaux de points de prise soient générés après la planification de trajectoire, vous devez désactiver cette option.
En situation réelle, vous pouvez décider d’activer ou non cette option selon les exigences du projet et les performances du système. Par exemple, dans des scénarios complexes, il est généralement recommandé d’activer cette option pour filtrer les points de prise invalides avant la planification de trajectoire et produire des tableaux de points de prise optimisés, afin d’améliorer l’efficacité globale.
-
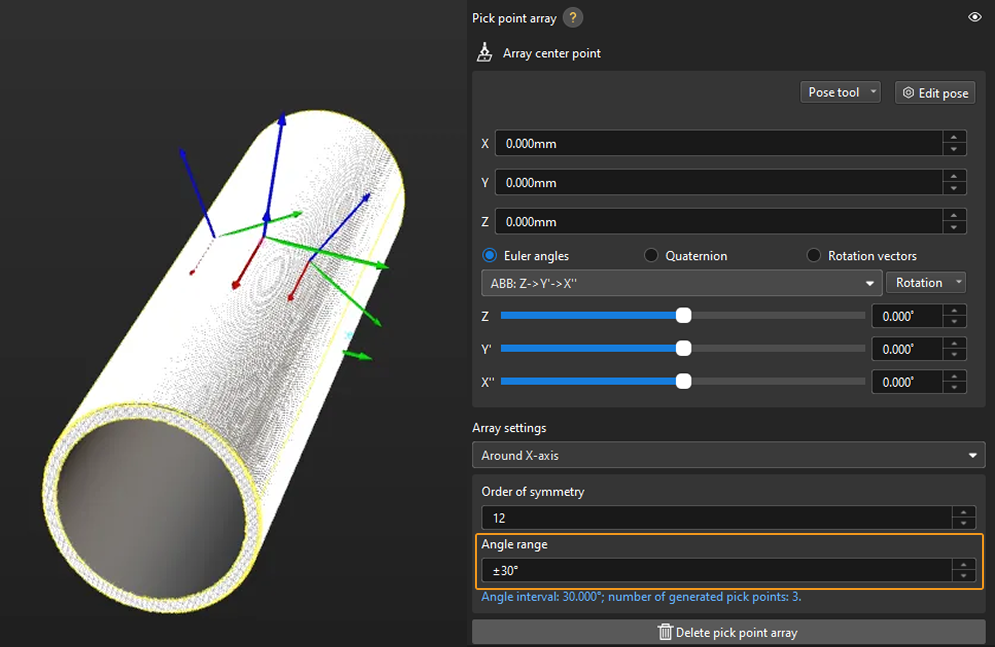
En prenant un tube rond comme exemple, les paramètres du tableau de points de prise sont les suivants.
En pratique, les points de prise avec un axe Z orienté vers le bas sont souvent invalides et affectent la planification de trajectoire. Par conséquent, vous devez réduire la Plage d’angle. Il est généralement recommandé de conserver la plage dans ±90°. Par exemple, lors de la configuration d’un tableau de points de prise pour des tubes ronds placés aléatoirement, la valeur de plage d’angle est définie à ±30° dans la figure ci-dessous.
Ajouter une configuration de prise
Prévisualiser l’effet de prise
Si un outil a été configuré dans l’outil de planification de trajectoire ou Mech-Viz, vous pouvez l’activer dans l’éditeur d’objet cible pour prévisualiser la relation positionnelle entre le point de prise et l’outil lors de la prise réelle. Cela aide à déterminer si les paramètres de point de prise sont appropriés. Les instructions détaillées sont les suivantes.
-
Outil de planification de trajectoire
-
Mech-Viz
-
Ajouter un outil de bout.
Ajouter un outil de bout et définir le TCP dans l’outil de planification de trajectoire.
-
Prévisualiser et activer l’outil.
Une fois l’outil de bout ajouté, les informations de l’outil seront automatiquement mises à jour dans la liste des outils au sein de l’éditeur d’objet cible. Vous pouvez sélectionner un outil dans la liste des outils en fonction de vos besoins réels et prévisualiser la relation positionnelle entre le point de prise et l’outil dans la zone de visualisation lors de la prise réelle (comme illustré ci-dessous).
Si l’outil est modifié dans l’outil de planification de trajectoire, veuillez enregistrer les modifications dans l’outil de planification de trajectoire afin de mettre à jour la liste des outils dans l’éditeur d’objet cible. 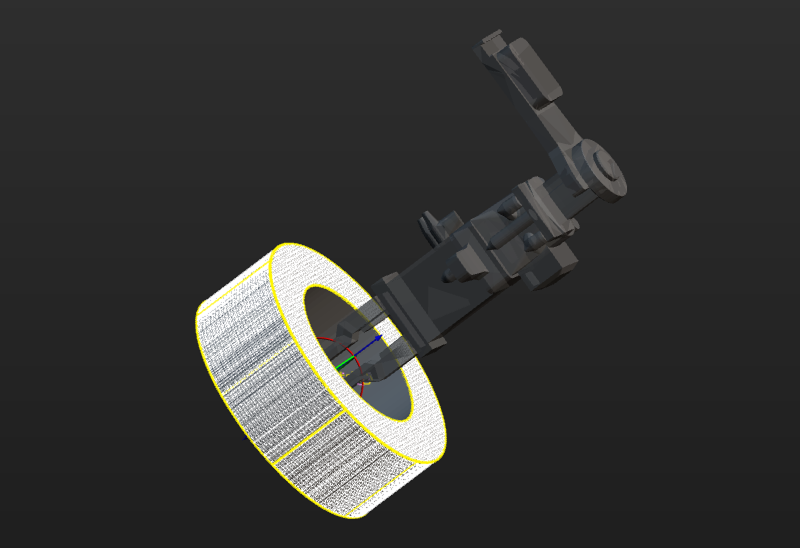
-
Assurez-vous que le projet Mech-Viz se trouve dans la solution actuelle.
Afin de garantir que les informations de l’outil de bout dans Mech-Viz puissent être mises à jour dans l’éditeur d’objet cible, reportez-vous à Exporter le projet vers Solution pour déplacer le projet Mech-Viz vers la solution actuelle.
-
Ajouter un outil de bout.
Ajouter un outil de bout et définir le TCP dans Mech-Viz.
-
Prévisualiser et activer l’outil.
Une fois l’outil de bout ajouté, les informations de l’outil seront automatiquement mises à jour dans la liste des outils au sein de l’éditeur d’objet cible. Vous pouvez sélectionner un outil dans la liste des outils en fonction de vos besoins réels et prévisualiser la relation positionnelle entre le point de prise et l’outil dans la zone de visualisation lors de la prise réelle (comme illustré ci-dessous).
Si vous avez modifié les configurations de l’outil dans Mech-Viz, enregistrez les modifications dans Mech-Viz pour mettre à jour la liste des outils dans l’éditeur d’objet cible.
Configurer les marges de translation et de rotation pour les outils
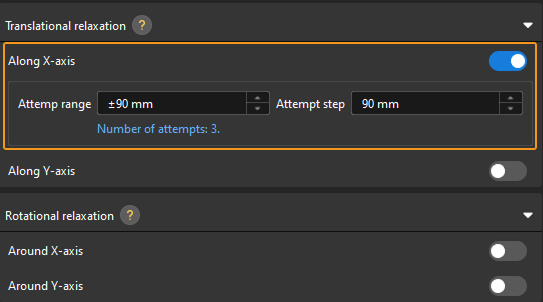
En pratique, afin de garantir que l’outil puisse toujours saisir l’objet cible après une translation ou une rotation selon un certain axe du point de prise, vous pouvez configurer la marge de translation et la marge de rotation pour l’outil dans l’éditeur d’objet cible.
Prenons le tube rond comme exemple : l’outil peut être translaté le long de l’axe X du point de prise pendant la saisie.
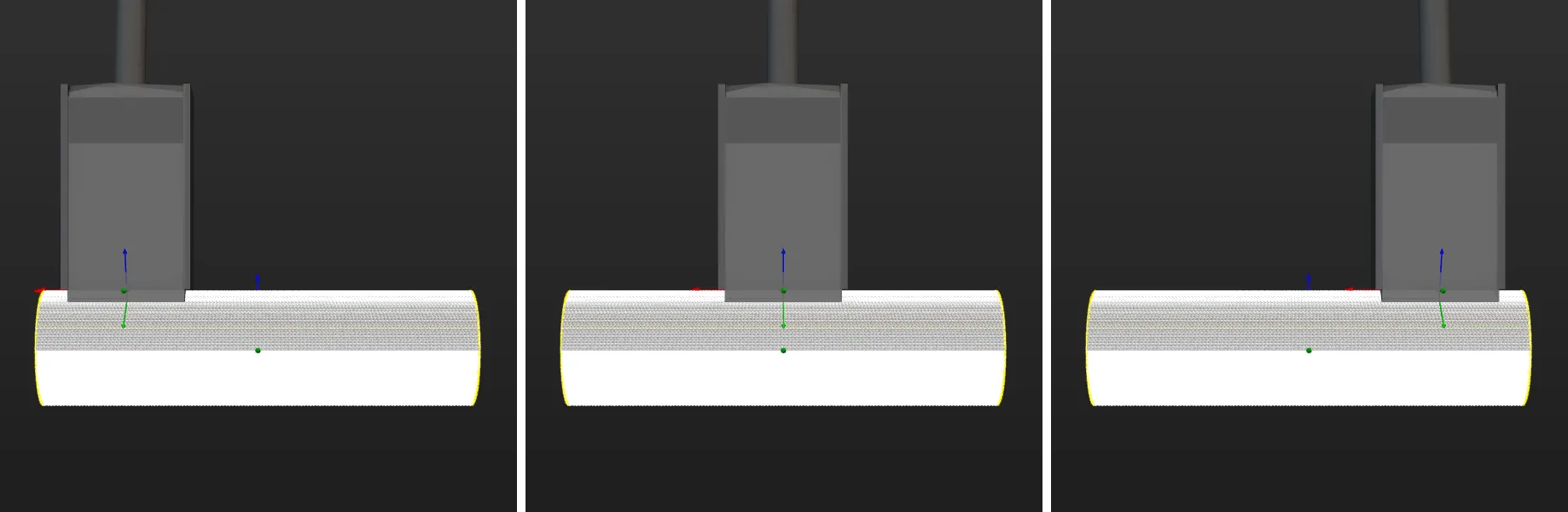
La configuration correspondante est présentée ci-dessous.
Définir la stratégie de sélection du point de prise
Par défaut, Rotation minimale de l’outil sera utilisée, et vous pouvez sélectionner une stratégie de sélection du point de prise selon les exigences réelles.
-
Rotation minimale de l’outil: Lorsque cette stratégie est sélectionnée, le point de prise qui entraîne la plus petite rotation de l’axe Z de l’outil durant l’ensemble du processus de prise et de dépose sera sélectionné en priorité. Cette stratégie peut éviter que l’outil ne tourne inutilement après la saisie de l’objet cible et prévenir la chute de l’objet saisi.
-
Différence minimale entre la pose de l’outil et la pose vision: Lorsque cette stratégie est sélectionnée, le point de prise avec la plus petite différence d’angle par rapport à la pose de l’objet cible sera sélectionné en priorité.
-
Collision minimale entre l’outil et le nuage de points: Lorsque cette stratégie est sélectionnée, le point de prise qui entraîne le moins de collisions entre l’outil et les nuages de points de l’objet cible sera sélectionné en priorité.
Cliquez sur Enregistrer pour sauvegarder les configurations de l’objet cible. Pour définir le modèle de collision, cliquez sur Suivant.
Définir le modèle de collision (optionnel)
Définir le modèle de collision
Le modèle de collision est un objet virtuel 3D utilisé pour la détection de collisions lors de la planification de trajectoire. L’outil recommande automatiquement le mode de génération du modèle de collision en fonction du workflow de configuration actuel. Le mode recommandé pour ce cas est Utiliser le modèle STL pour générer un cube de nuage de points. Cet outil générera des cubes de nuage de points en se basant sur le modèle STL sélectionné pour la détection de collision. Le modèle de collision généré par cette méthode présente une grande précision, tandis que la vitesse de détection de collision est plus faible.
-
Sélectionnez le modèle STL.
Cliquez sur Sélectionner le modèle STL puis sélectionnez le modèle STL utilisé pour générer le cube de nuage de points.
-
Alignez les modèles.
L’alignement du modèle de collision avec le modèle de nuage de points de l’objet cible garantit une détection de collisions efficace. Vous pouvez cliquer sur Aligner automatiquement le modèle de nuage de points et le modèle de collision ou ajuster manuellement la pose du modèle de collision pour obtenir l’alignement avec le modèle de nuage de points de l’objet cible.
Configurer la symétrie de l’objet cible tenu
La symétrie de rotation est la propriété de l’objet cible qui lui permet de coïncider avec lui-même après une rotation d’un certain angle autour de son axe de symétrie. Lorsque le « Type de waypoint » est « Pose de l’objet cible », la configuration de la symétrie de rotation peut empêcher l’outil du robot d’effectuer des rotations inutiles lors de la manipulation de l’objet cible. Cela augmente le taux de réussite de la planification de trajectoire et réduit le temps nécessaire à celle-ci, permettant au robot de se déplacer plus facilement et rapidement.
Sélectionnez l’axe de symétrie en vous référant à Symétrie de rotation des objets cibles, puis définissez l'Ordre de symétrie et la Plage d’angle.
À présent, les paramètres du modèle de collision sont terminés. Cliquez sur Enregistrer pour enregistrer l’objet cible dans Solution folder\resource\workobject_library. L’objet cible pourra alors être utilisé dans les étapes d’appariement 3D ultérieures.