Recalibrage automatique dans la configuration œil-en-main (robot à quatre axes/cinq axes)
Ce guide pratique explique comment effectuer le recalibrage automatique pour des robots à quatre axes/cinq axes dans la configuration œil-en-main (EIH).
Préparatifs avant la calibration
Avant la calibration main-œil, vous devez effectuer les préparatifs suivants:
Construire le système de vision
Construisez le système de vision Mech-Mind en vous référant à la section Configuration matérielle du système de vision.
Vous devez utiliser Mech-Eye Viewer, Mech-Vision et Mech-Viz pendant la calibration main-œil. Veuillez vous assurer qu’ils sont installés et exécutent les dernières versions.
Terminer la configuration de communication du robot
Si le robot utilise l’Interface standard pour communiquer avec le système de vision, veuillez configurer la communication via l’Interface standard avec le robot. Selon la marque de robot utilisée dans votre projet, vous pouvez terminer la configuration de communication de l’Interface standard en vous référant au guide « Configurer la communication de l’Interface standard » pour la marque de robot correspondante dans Communication via l’Interface standard.
Si le robot utilise Master-Control pour communiquer avec le système de vision, veuillez configurer la communication Master-Control avec le robot. Selon la marque de robot utilisée dans votre projet, vous pouvez terminer la configuration de communication Master-Control en vous référant au guide « Configurer la communication Master-Control » pour la marque de robot correspondante dans vCommunication Master-Control.
Préparer les matériaux requis pour la calibration
La calibration automatique dans la configuration EIH nécessite l’utilisation de la plaque de calibration.
Veuillez préparer la plaque de calibration selon les exigences suivantes:
-
Assurez-vous que les cercles de la plaque de calibration sont clairement visibles et sans rayures évidentes, et que la plaque ne présente pas de déformations.
-
Dans la configuration EIH, veuillez placer la plaque de calibration au centre du plan de travail, là où les objets cibles seront placés.
Vérifier la qualité du nuage de points de la plaque de calibration
| La qualité du nuage de points de la plaque de calibration affectera la précision de la calibration main-œil. Vérifiez la qualité du nuage de points de la plaque de calibration pour assurer la précision et la fiabilité des résultats de calibration. Le processus de calibration comprend l’étape de vérification de la qualité du nuage de points de la plaque de calibration. Vous pouvez également vérifier la qualité du nuage de points avant de commencer la calibration afin de gagner du temps. |
-
Placez la plaque de calibration à l’horizontale au centre du plan de travail dans le champ de vision de la caméra.
-
Ouvrez le logiciel Mech-Eye Viewer, sélectionnez la caméra utilisée par le projet, puis sélectionnez le groupe de paramètres « calib » et ajustez les paramètres de la caméra.
-
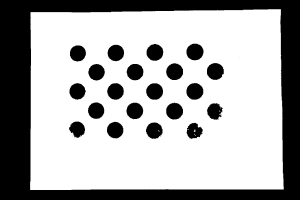
Ajustez les paramètres 2D pour garantir que l’image 2D globale n’est pas trop sombre, et que chaque cercle de calibration est clairement visible.
-
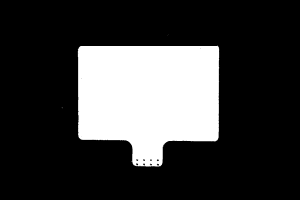
Ajustez les paramètres 3D pour garantir que chaque cercle de calibration sur la plaque est complet et visible.
Si l’éclairage ambiant sur site n’est pas idéal et affecte la qualité des images 2D et des nuages de points, vous pouvez utiliser de l’ombre ou un éclairage d’appoint pour améliorer les conditions lumineuses.
-
Assurez-vous que la qualité du nuage de points de la plaque de calibration est conforme aux normes après avoir terminé les étapes précédentes.
Normal Surexposé Sous-exposé Image 2D
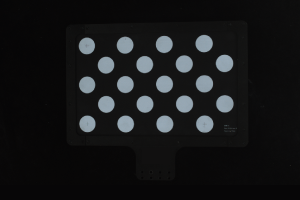
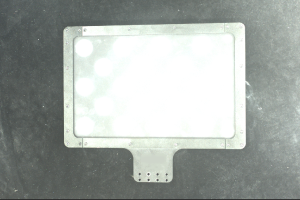

Nuage de points
Effectuer les vérifications préalables à la calibration
Veuillez vous référer à Vérifications préalables à la calibration et compléter les vérifications suivantes:
-
Confirmer que la base du robot est solidement fixée.
-
Confirmer que le cadre de montage de la caméra et la caméra sont solidement fixés.
-
Confirmer que la précision absolue du robot répond aux exigences d’utilisation.
-
Vérifier les paramètres du modèle de robot.
-
Confirmer que la caméra est préchauffée.
Configuration préalable à la calibration
-
Ouvrez Mech-Vision, sélectionnez un projet dans la liste des projets, puis cliquez sur le bouton Calibration de caméra dans la barre d’outils. La fenêtre Configuration avant la calibration s’affiche.
-
Après avoir confirmé que les vérifications préalables sont terminées, cliquez sur J’ai terminé toutes les vérifications, puis cliquez sur Suivant.
-
Dans la fenêtre Sélectionner l’utilisation des paramètres, sélectionnez le bouton radio Continuer à travailler avec la caméra calibrée, puis cliquez sur le bouton Suivant.
-
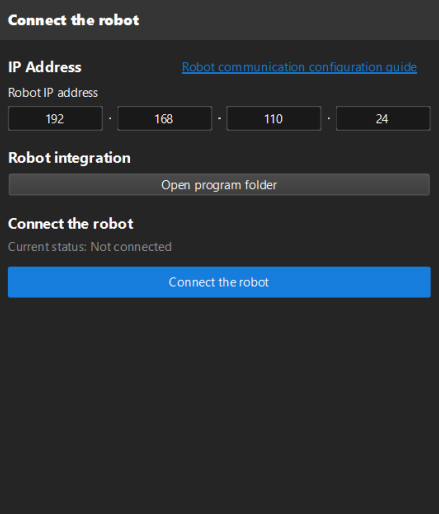
Statut de la caméra doit être affiché comme connecté.
-
Si le programme utilise le mode de communication Interface standard, veuillez sélectionner et exécuter le programme de calibration automatique sur la console d’enseignement du robot.
-
Après avoir terminé les réglages ci-dessus,Statut du robot doit afficher Connecté.
-
-
Dans la fenêtre Sélectionner la tâche de calibration, sélectionnez le bouton radio Recalibrer depuis le début, puis cliquez sur le bouton Calibration. La fenêtre Calibration (Œil-en-main) s’affiche.
Jusqu’à présent, vous avez terminé la configuration préalable et pouvez démarrer la procédure de calibration.
Effectuer la calibration
Se connecter à la caméra
Par défaut, la caméra utilisée dans le projet est configurée pour être connectée. Veuillez cliquer sur le bouton Suivant pour continuer la procédure de calibration.
Si la caméra n’est pas connectée, veuillez effectuer la connexion de la caméra en vous référant aux instructions suivantes:
-
À l’étape Se connecter à la caméra, sélectionnez la caméra à connecter dans la liste ID de la caméra, puis cliquez sur le bouton
 ou double-cliquez sur l’entrée de la caméra pour vous y connecter.
ou double-cliquez sur l’entrée de la caméra pour vous y connecter.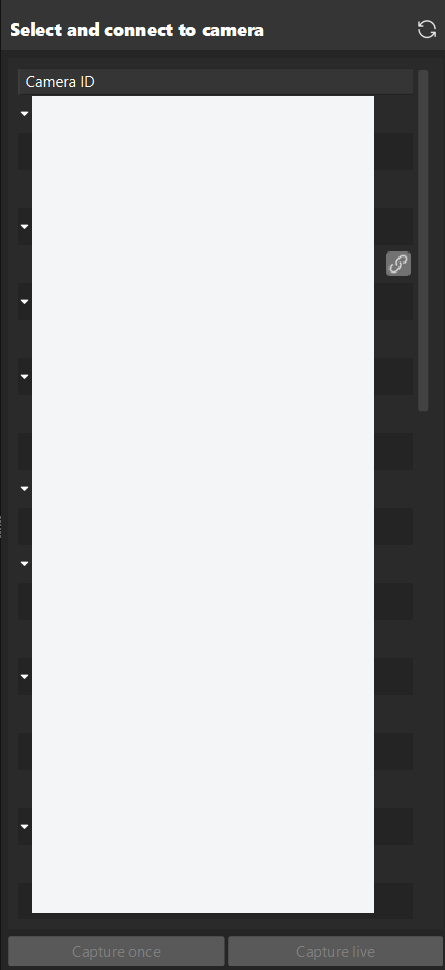
-
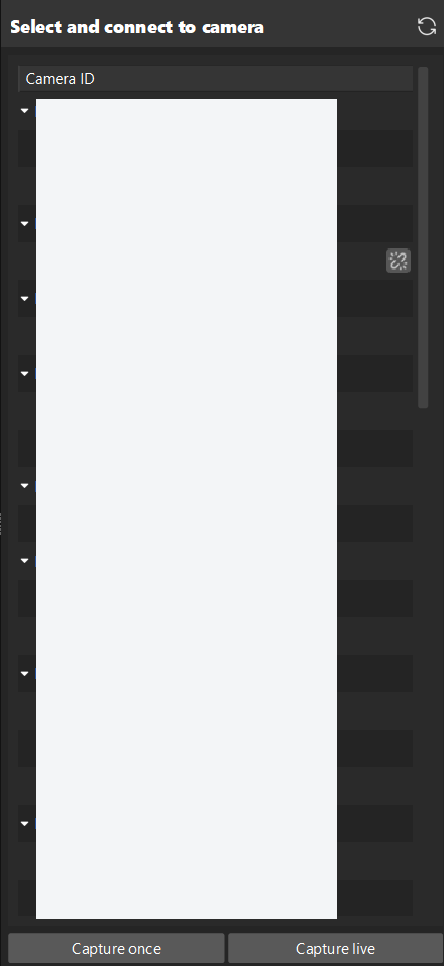
Après que la caméra est connectée, cliquez sur le bouton Capture en direct ou Capturer une fois.
-
Dans le panneau Visionneuse d’image, assurez-vous que la caméra peut capturer des images correctement et cliquez sur le bouton Suivant dans la barre inférieure.
Monter la plaque de calibration et vérifier les paramètres intrinsèques
-
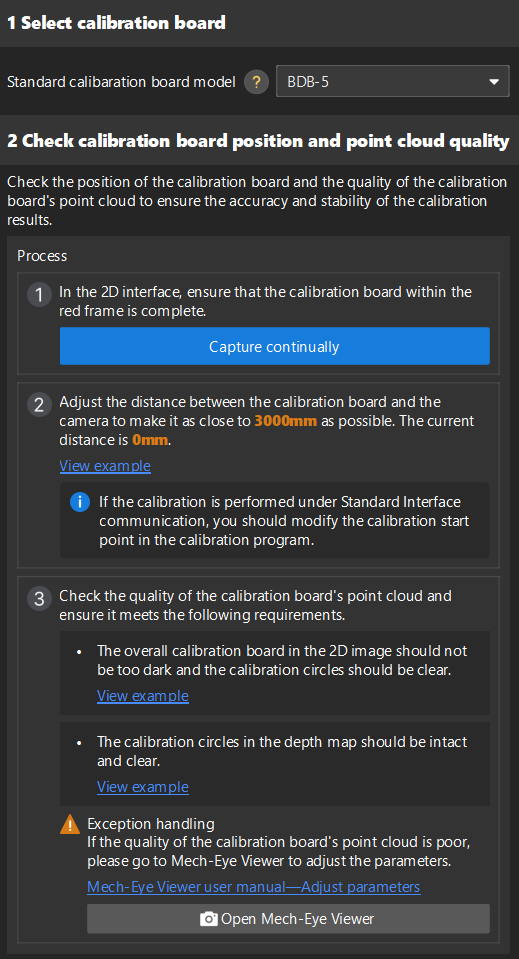
À l’étape Monter la plaque de calibration et vérifier les paramètres intrinsèques, définissez le paramètre Modèle de plaque de calibration standard dans la zone 1 Sélectionner la plaque de calibration.
-
Dans la zone 2 Vérifier la position de la plaque de calibration et la qualité du nuage de points, lisez attentivement les exigences relatives à la position de la plaque de calibration et à la qualité du nuage de points, puis cliquez sur le bouton Capturer en continu. Le bouton Capture en direct se transforme en Arrêter la capture et détecter la position.
-
Déplacez manuellement le robot vers une position appropriée, en veillant à ce que la plaque de calibration soit entièrement dans le cadre rouge, et que la distance entre la plaque de calibration et la caméra soit aussi proche que possible de la valeur recommandée sur l’interface.
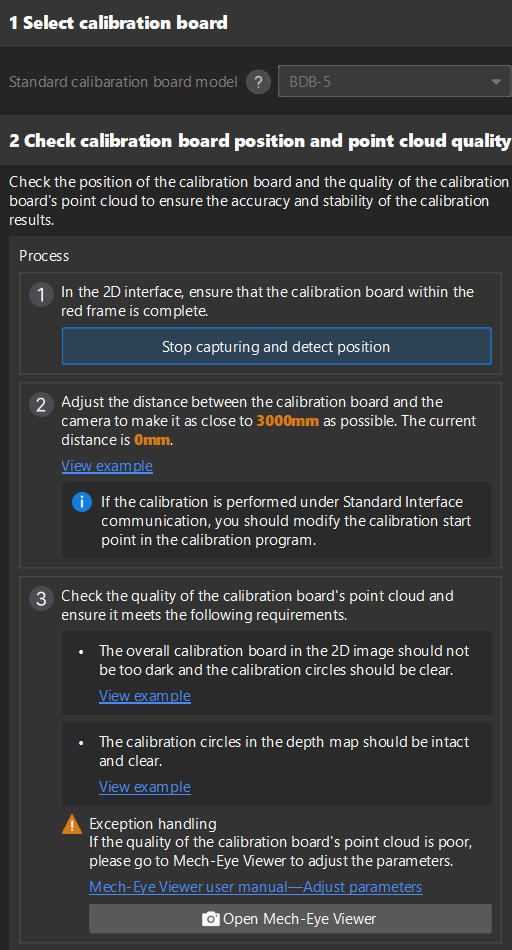
Si le mode de communication Interface standard est utilisé pour la calibration, après avoir ajusté la distance entre la plaque de calibration et la caméra selon les indications de l’interface, la position du robot peut être utilisée comme point de départ de la calibration. -
Veuillez vous assurer que l’image 2D et la carte de profondeur de la plaque de calibration répondent aux exigences, puis cliquez sur le bouton Arrêter la capture et détecter la position.
Si les images capturées ne répondent pas aux exigences, cliquez sur le bouton Ouvrir Mech-Eye Viewer pour ouvrir le logiciel Mech-Eye Viewer, ajustez les paramètres d’exposition 2D et 3D et recapturez des images. Veuillez noter que vous devez d’abord changer le paramètre Groupe de paramètres en « calib ».
-
Dans la zone 3 Vérifier les paramètres intrinsèques, cliquez sur le bouton Vérifier les paramètres intrinsèques.
-
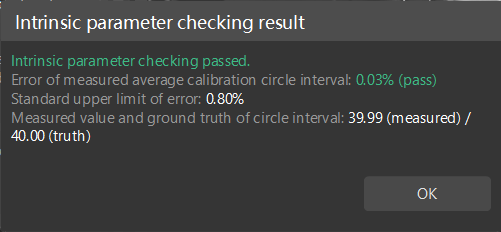
Confirmez les résultats de la vérification des paramètres intrinsèques de la caméra.
-
Si la vérification des paramètres intrinsèques de la caméra réussit, cliquez sur le bouton OK dans la fenêtre affichée, puis cliquez sur le bouton Suivant dans la barre inférieure.
-
Si la vérification des paramètres intrinsèques échoue, vous pouvez dessiner des cercles d’aide pour assister la vérification des paramètres intrinsèques, puis cliquez sur le bouton Revérifier les paramètres intrinsèques.
-
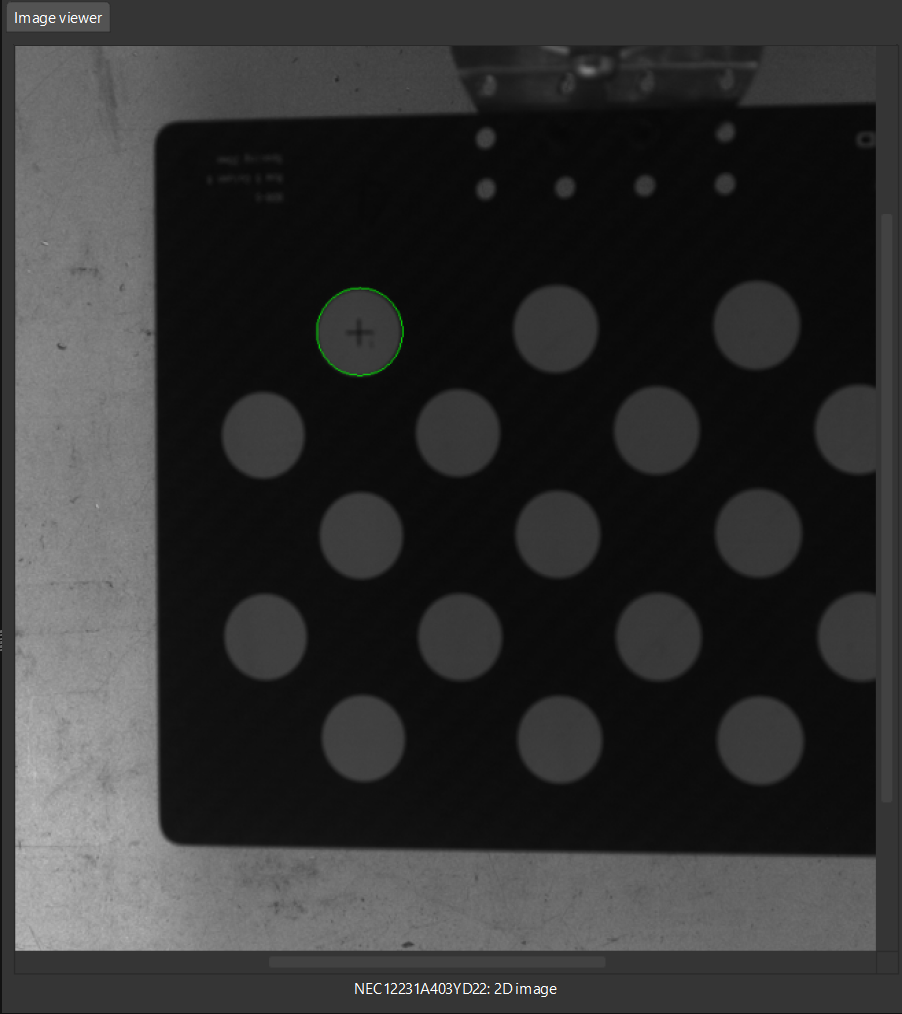
Dessiner un cercle d’aide
-
Pour dessiner un cercle d’aide, cliquez sur le bouton Dessiner un cercle d’aide.
-
Dans le panneau Visionneuse d’image à droite, cliquez avec le bouton droit sur l’image de la plaque de calibration, décochez la case Adapter à la fenêtre, maintenez la touche Ctrl et faites rouler la molette pour ajuster l’image à une taille appropriée.
-
Déplacez le pointeur de la souris sur le point central de la croix du cercle de calibration, maintenez enfoncé le bouton gauche de la souris pour que le cercle d’aide inclue complètement le cercle de calibration, puis relâchez le bouton gauche.
-
Cliquez sur le bouton Revérifier les paramètres intrinsèques, et confirmez que la vérification des paramètres intrinsèques de la caméra réussit. Si la vérification des paramètres intrinsèques échoue toujours, veuillez contacter le Support technique.
Connecter le robot
Si la communication Interface standard est utilisée pendant la calibration, veuillez vous référer à Connecter le robot (Interface standard).
Si la communication Master-Control est utilisée pendant la calibration, veuillez vous référer à Connecter le robot (Master-Control).
Connecter le robot (Interface standard)
-
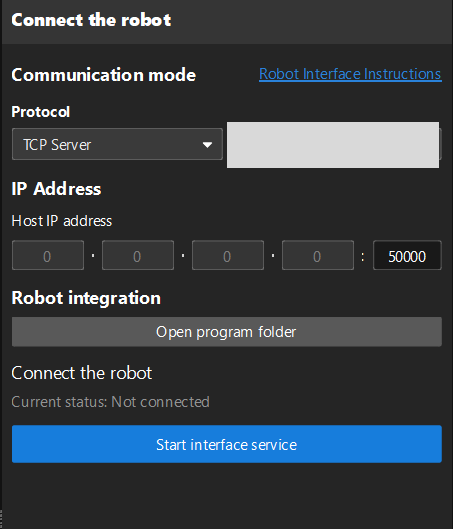
(Optionnel) À l’étape Connecter le robot, cliquez sur le bouton Démarrer le service d’interface. Le bouton se transforme en En attente de connexion du robot.... Si l’option Communication de l’interface standard sur la barre d’outils était déjà activée, cette étape n’est pas nécessaire.
-
Sur le boîtier d’apprentissage du robot, sélectionnez le programme de calibration automatique, enseignez le point de départ et exécutez le programme. Pour les détails des programmes de calibration des différents robots, veuillez vous référer à la section Communication de l’interface standard. Après le démarrage du programme, le message de journal « Entrée dans le processus de calibration, veuillez démarrer la calibration dans Mech-Vision » sera imprimé dans le panneau Journal de la console.
-
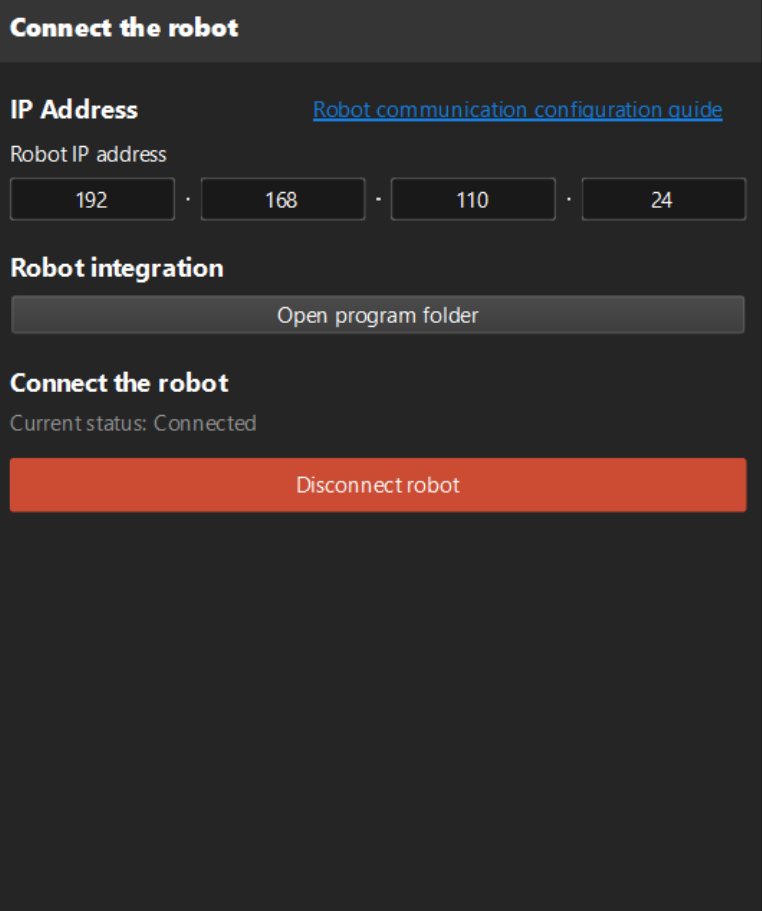
Retournez à Mech-Vision, confirmez que le message d’état « Connecté » est affiché dans la zone Connecter le robot, et cliquez sur le bouton Suivant.
Connecter le robot (Master-Control)
-
Sur le boîtier d’apprentissage du robot, sélectionnez et exécutez le programme Master-Control. Pour les instructions des différents robots, veuillez vous référer à la section Communication Master-Control.
-
Retournez au logiciel Mech-Vision, et définissez le paramètre Adresse IP du robot dans l’étape Connecter le robot.
-
Cliquez sur le bouton Connecter le robot dans la zone Connecter le robot. Le bouton se transforme en En attente de connexion du robot...
-
Attendez jusqu’à ce que le message d’état « Connecté » soit affiché dans la zone Connecter le robot, puis cliquez sur le bouton Suivant.
Définir la trajectoire de mouvement
-
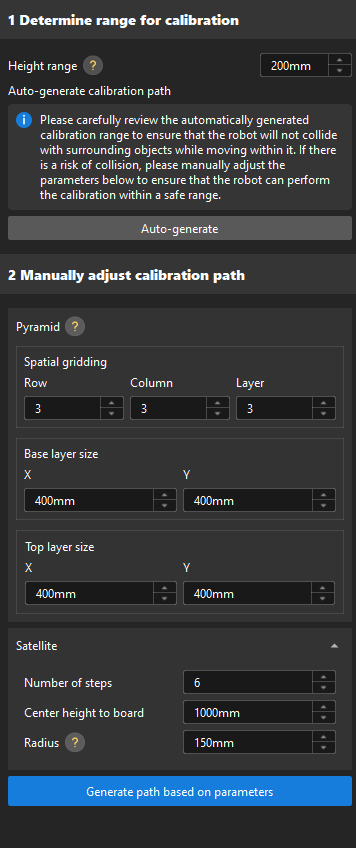
Déterminer l’étendue de calibration.
Définissez le paramètre Plage de hauteur. Le paramètre Plage de hauteur doit être défini selon la plage de distance de travail recommandée de la caméra et la taille de l’espace de travail du robot. En général, la plage de hauteur est légèrement supérieure à la hauteur des objets cibles à reconnaître.
-
Générer automatiquement la trajectoire de calibration (recommandé).
Cliquez sur le bouton Génération automatique, puis cliquez sur le bouton OK dans la fenêtre affichée Aligner automatiquement la trajectoire du robot sur le repère de la caméra.
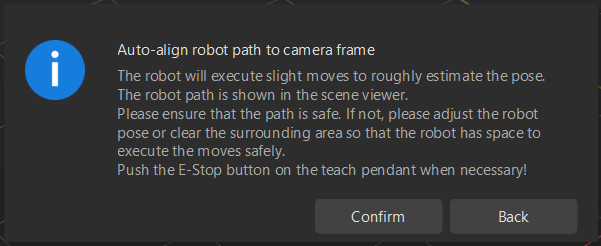
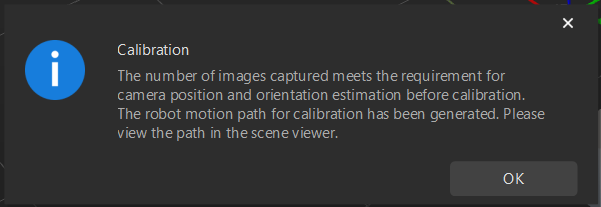
Cette opération déplacera légèrement le robot et capturera des images. L’ensemble du processus peut prendre de 10 à 15 secondes. Veuillez vous assurer que la trajectoire de mouvement est sûre. En cas d’urgence, appuyez sur le bouton d’arrêt d’urgence sur la console d’enseignement du robot pour arrêter immédiatement le robot. Après que la trajectoire de calibration a été générée, cliquez sur OK dans la fenêtre contextuelle Calibration.
-
Modifier manuellement la trajectoire de calibration.
Si la trajectoire de calibration générée automatiquement à l’étape 2 présente un risque de collision, vous pouvez également la modifier manuellement en ajustant la structure pyramidale, en redivisant la grille pyramidale et en définissant l’angle de rotation.
-
Maillage spatial : Pour raccourcir le temps de calibration ou si l’étendue de calibration est petite, vous pouvez définir deux rangées, deux colonnes et deux couches.
-
Taille de la couche de base : Si l’espace sur site est suffisant, la taille de la couche de base correspond généralement à la taille du bac ou de la palette. Si l’espace sur site est limité, la taille de la couche de base peut être réduite de manière appropriée pour éviter les collisions.
-
Taille de la couche supérieure : En général, la taille de la couche supérieure doit être légèrement inférieure à celle de la couche de base, ce qui rend l’étendue de calibration trapézoïdale.
-
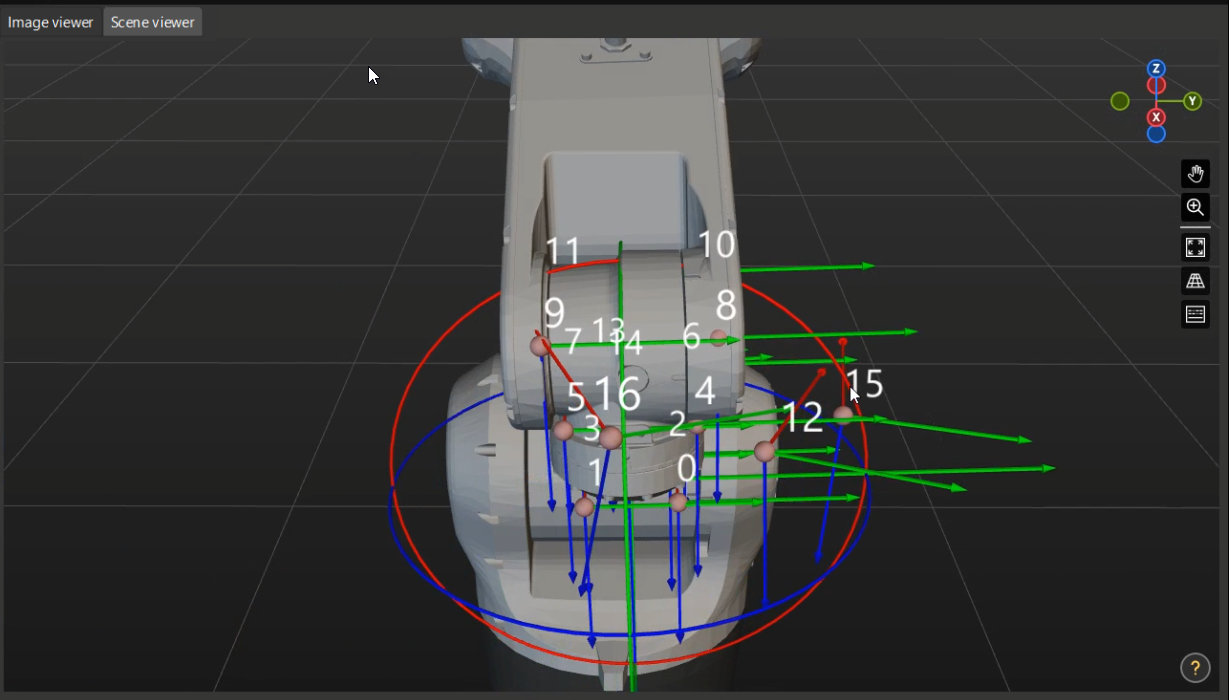
-
Dans le panneau Visionneuse de scène à droite, assurez-vous que tous les points de passage sont correctement positionnés et que le robot ne heurtera pas les objets environnants lors de ses déplacements.
-
Cliquez sur le bouton Générer la trajectoire de mouvement sur la base des paramètres de trajectoire puis cliquez sur le bouton Suivant dans la barre inférieure.
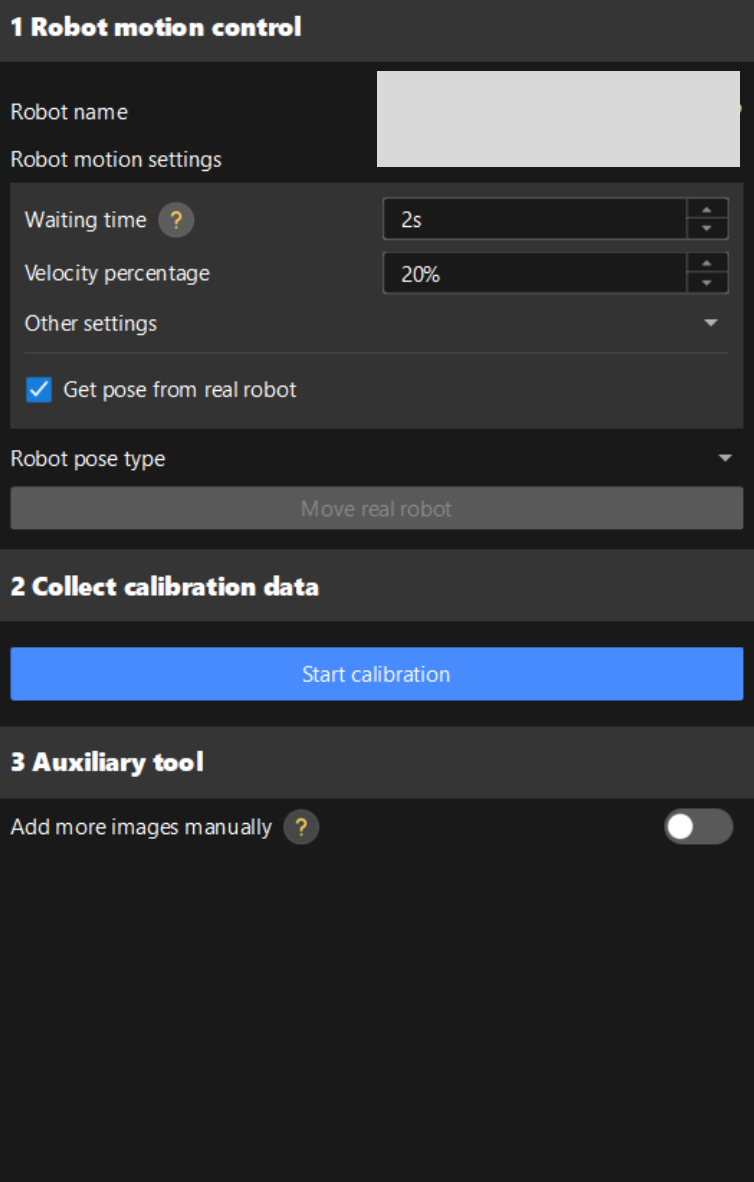
Obtenir des images et des poses
| Avant cette étape, veuillez vous assurer que la pose actuelle du robot correspond à la pose réelle sur le boîtier d’apprentissage du robot. |
-
À l’étape Obtenir des images et des poses, cliquez sur le bouton Démarrer la calibration.
-
Lisez attentivement la fenêtre de sécurité et cliquez sur le bouton OK.
-
Attendez que le robot termine son déplacement le long de la trajectoire prédéfinie et que la caméra finisse de capturer des images sur tous les points de passage. Une fenêtre contextuelle affichera la progression vers le point de calibration.
Veuillez rester à l’écart de la zone de travail du robot pour votre sécurité. -
Lorsque la fenêtre contextuelle indique « Tous les points de calibration ont été atteints avec succès, et la calibration est terminée. », cliquez sur le bouton Ok.
-
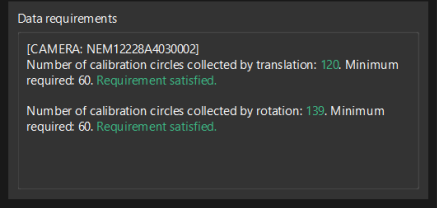
Confirmez que les données de calibration collectées répondent aux exigences en matière de données, puis cliquez sur le bouton Suivant dans la barre inférieure.
Si les exigences ne sont pas satisfaites, veuillez déplacer manuellement le robot (via le boîtier d’apprentissage ou Mech-Viz), activez l’option Ajouter davantage d’images manuellement dans l’3 Outil auxiliaire, et cliquez sur le bouton Ajouter des images et enregistrer les poses de la bride pour ajouter l’image de la plaque de calibration et saisir la pose de la bride du robot.
Calculer les paramètres extrinsèques
-
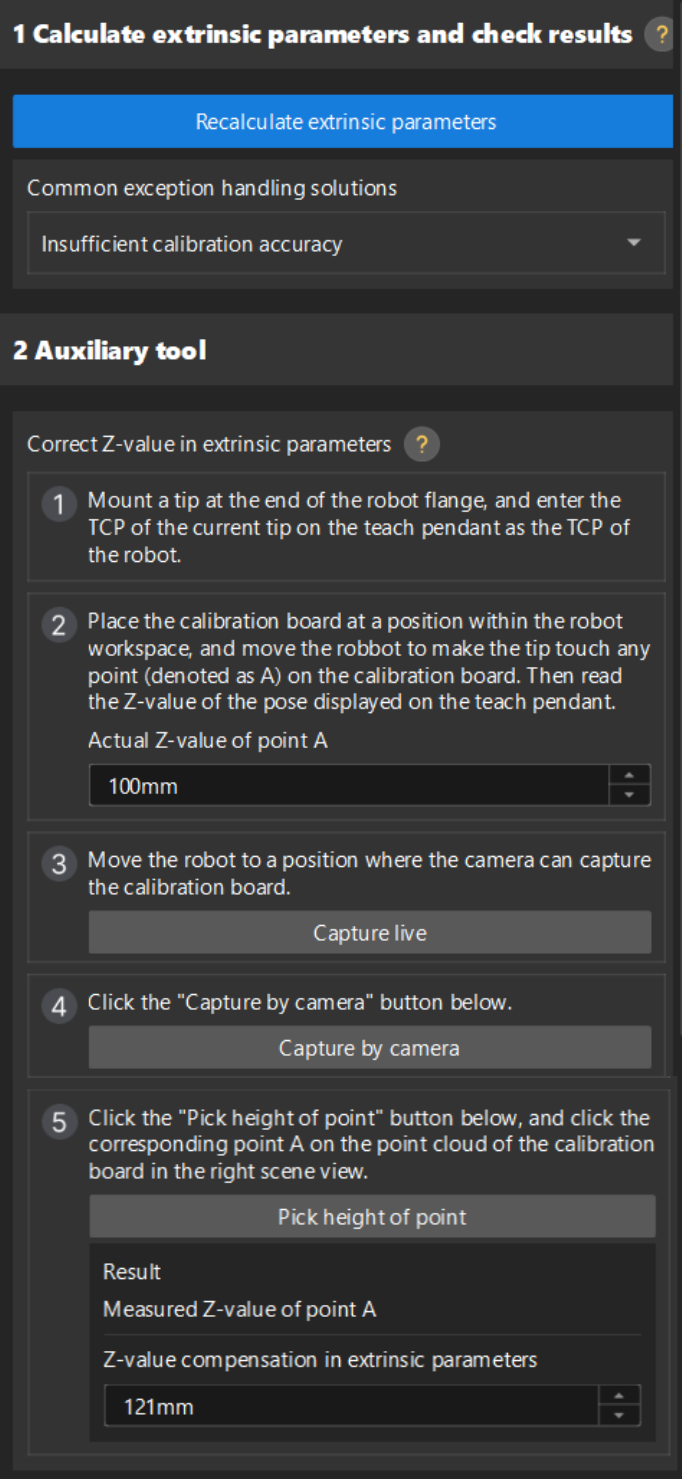
À l’étape Calculer les paramètres extrinsèques, cliquez sur le bouton Calculer les paramètres extrinsèques dans la zone 1 Calculer les paramètres extrinsèques et vérifier les résultats.
-
Dans la fenêtre affichée indiquant la réussite de l’étalonnage, cliquez sur le bouton OK.
-
Suivez les instructions concernant la correction de la valeur Z dans les paramètres extrinsèques dans la zone 2 Outil auxiliaire afin de calculer la compensation de la valeur Z dans les paramètres extrinsèques.
En raison du manque de degrés de liberté en rotation des robots à quatre axes/cinq axes, les images capturées pendant l’étalonnage peuvent manquer de rotation. Après l’étalonnage, vous devez corriger la valeur Z dans les paramètres extrinsèques.
Vérifier les résultats de la calibration
Cette section fournit des méthodes pour valider rapidement les résultats de la calibration.
Afficher le nuage de points d’erreur dans la Visionneuse de nuage de points
Après le calcul des paramètres extrinsèques de la caméra, effectuez les opérations suivantes:
-
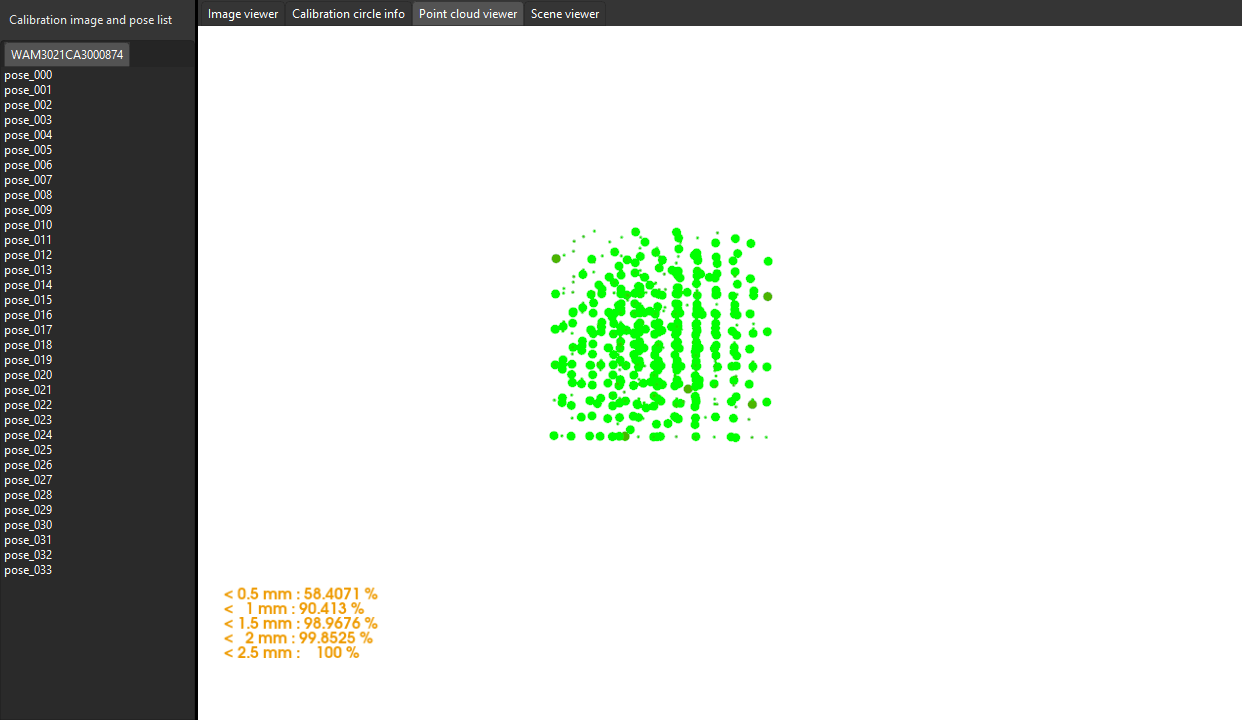
À l’étape Calculer les paramètres extrinsèques, affichez le nuage de points d’erreur dans le panneau Visionneuse de nuage de points à droite après la fin du calcul de calibration.
Le nuage de points d’erreur montre l’écart entre la valeur calculée et la valeur réelle des cercles sur la plaque de calibration. Pour une description détaillée, veuillez vous référer à Description du nuage de points d’erreur. -
Confirmez que la précision de la calibration répond aux exigences du projet. Trouvez la valeur d’erreur au pourcentage 100 % pour obtenir une précision de calibration approximative.
Par exemple, la vue du nuage de points après calibration avec plusieurs poses aléatoires de la plaque de calibration est illustrée dans la figure ci-dessous. L’erreur de calibration est inférieure à ±2,5 mm.
Vérifier grossièrement le degré de coïncidence entre le nuage de points du robot et le modèle du robot dans la Visionneuse de scène
Après avoir calculé les paramètres extrinsèques de la caméra, veuillez effectuer l’opération suivante:
-
Déplacez l’effecteur terminal du robot vers une position où la caméra peut capturer des images de la base.
-
À l’étape Calculer les paramètres extrinsèques, cliquez sur le bouton Capture par la caméra dans la zone 2 Outil auxiliaire. Cette opération déclenche la prise d’images par la caméra.
-
Dans le panneau Visionneuse de scène à droite, vérifiez visuellement le degré de coïncidence entre le nuage de points du robot réel et le modèle du robot. Si le nuage de points du robot coïncide grossièrement avec le modèle du robot, la calibration est réussie.
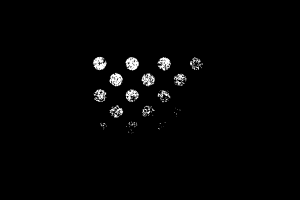
Comme montré sur la figure, la partie colorée est le modèle du robot, la partie noire est le nuage de points du robot. À partir de la figure, vous pouvez constater que le modèle du robot et le nuage de points du robot coïncident grossièrement. Cela indique que le résultat de calibration peut être utilisé.
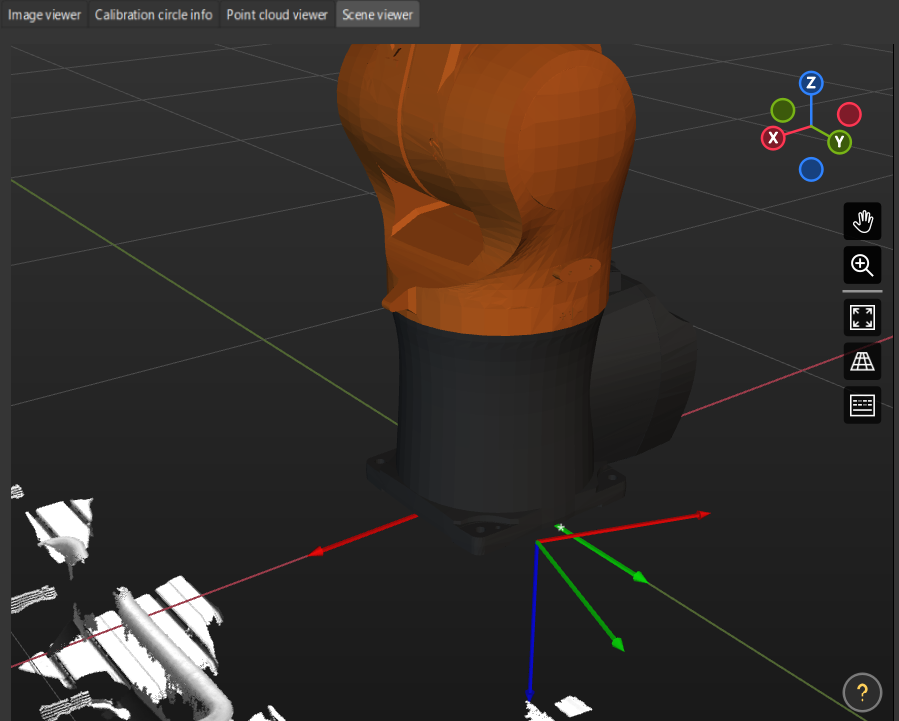
| Si la caméra ne peut pas capturer la base en raison des degrés de liberté du robot ou des limitations de l’espace de travail, vous pouvez choisir de visualiser le décalage du nuage de points de la plaque de calibration par rapport à un point fixe dans la visionneuse de scène à la place. |
Utiliser l’outil de validation de précision des paramètres extrinsèques pour valider les paramètres extrinsèques
Pour les scénarios de haute précision (dans ±2 mm), cette méthode doit être utilisée pour valider en profondeur les paramètres extrinsèques.
À l’étape Calculer les paramètres extrinsèques, cliquez sur Exactitude des paramètres extrinsèques pour ouvrir l’outil. Veuillez suivre les indications de l’outil pour valider l’exactitude des paramètres extrinsèques et générer le rapport d’évaluation final.
Si la précision de calibration ne répond pas aux exigences, vous pouvez cliquer sur le bouton Consulter le rapport de calibration des paramètres extrinsèques pour afficher les résultats de la vérification de la convention des angles d’Euler, de la vérification de la précision de la caméra et de la vérification de la précision absolue du robot.
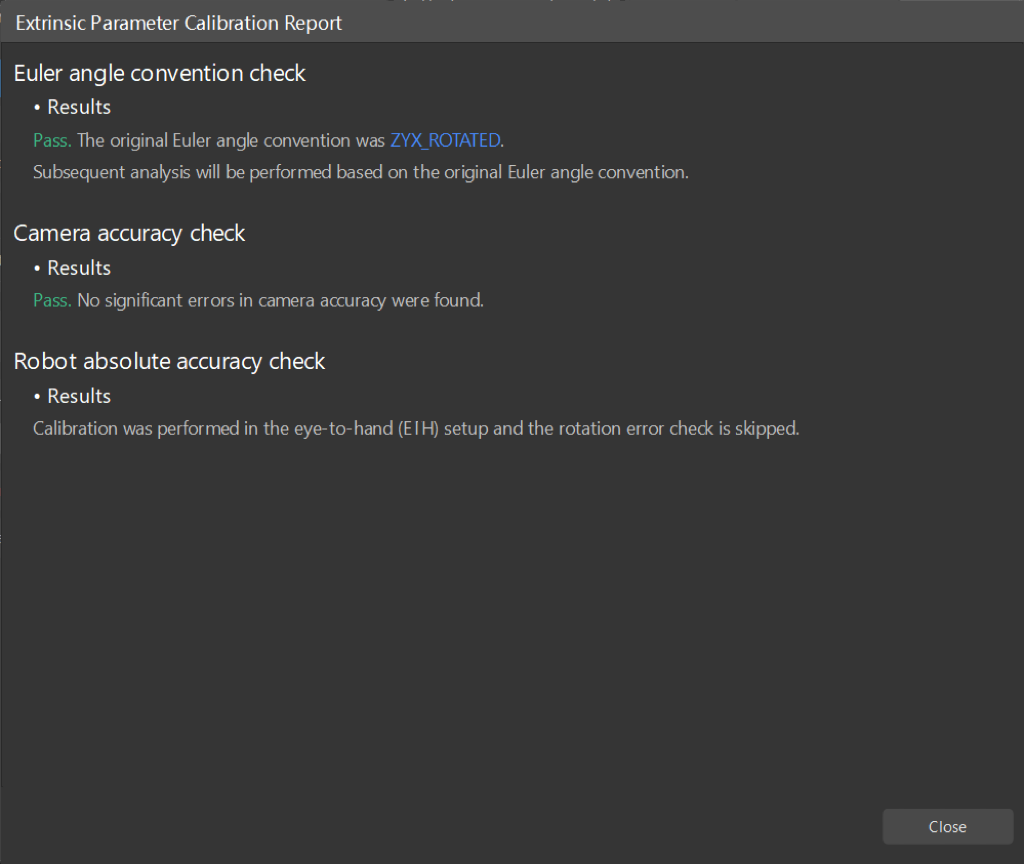
|
Si la précision de la caméra dans le rapport ne répond pas aux exigences, veuillez suivre les recommandations pour résoudre les erreurs de précision de la caméra. |
Appliquer le résultat de la calibration
Accédez à l’étape Calculer le paramètre extrinsèque, cliquez sur Enregistrer en bas. Configurez ensuite les paramètres d’enregistrement dans la boîte de dialogue Enregistrer le groupe de paramètres de calibration, puis cliquez sur OK. Le résultat de la calibration sera automatiquement enregistré dans le répertoire « calibration » du projet.
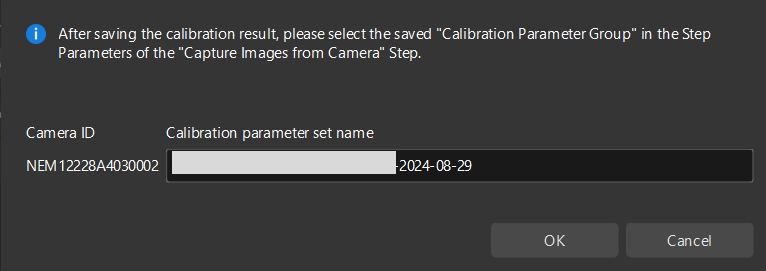
|
Après que « Projet actuel - Enregistrer le fichier uniquement » est sélectionné, lorsque vous souhaitez appliquer un nouveau groupe de paramètres de calibration ultérieurement, accédez au panneau Paramètres de l’étape de l’étape « Capturer des images depuis la caméra », cliquez sur l’icône |
À ce stade, le processus de calibration est terminé.
Codes d’état liés à la calibration
Si le robot utilise l’Interface standard pour communiquer avec le système de vision pendant la calibration main-œil, le système de vision retournera des codes d’état dans les données de réponse pour indiquer l’état d’exécution des commandes. Les codes d’état indiquent aussi bien les résultats d’exécution normaux que les échecs d’exécution. Vous pouvez effectuer des investigations supplémentaires en fonction des codes d’état.
Codes d’erreur de calibration
| Codes d’erreur | Description |
|---|---|
Calibration : Erreur de paramètre |
|
Calibration : Pose de la bride de calibration non fournie par Mech-Vision |
|
Calibration : Positions articulaires de calibration non fournies par Mech-Vision |
|
Calibration : Le robot n’a pas atteint le point de calibration |