Recalibrage main-œil
La calibration main-œil établit la relation de transformation entre les repères de référence de la caméra et du robot (c’est-à-dire les paramètres extrinsèques de la caméra). Grâce à cette relation, la pose de l’objet déterminée par le système de vision peut être transformée dans le repère de référence du robot, ce qui guide le robot dans l’exécution de ses tâches.
|
Quand faut-il procéder à un recalibrage main-œil ?
Lors du déploiement de l’application, la calibration main-œil a été effectuée et les paramètres extrinsèques ont été vérifiés comme satisfaisant aux exigences de précision du projet. Toutefois, un recalibrage main-œil est nécessaire dans les cas suivants:
-
Lors du remplacement d’un équipement du système de vision (par exemple une caméra): La relation main-œil existante du robot n’est plus applicable ; il faut donc refaire la calibration main-œil.
-
Lorsque l’environnement de travail ou l’agencement du robot changent: Si des modifications de l’environnement affectent la position relative entre la caméra et le robot, il faut refaire la calibration main-œil.
-
Lorsque l’exigence de précision de préhension augmente: Si les résultats de calibration initiaux ne répondent pas aux exigences sur site, une précision plus élevée est nécessaire.
-
Quand une collision ou un mouvement entraîne des changements de position du robot ou de la caméra: Toute modification physique susceptible d’affecter la position relative entre la caméra et le robot nécessite un recalibrage main-œil.
-
Lorsque des problèmes de préhension imprécise surviennent et que les erreurs des paramètres extrinsèques augmentent: La dégradation des paramètres extrinsèques peut être causée par une baisse de la précision des paramètres intrinsèques de la caméra ou de la précision du robot. Pour savoir comment évaluer les erreurs des paramètres extrinsèques, veuillez consulter Méthodes d’analyse de l’erreur des paramètres extrinsèques.
-
Pour une application à long terme, afin d’assurer la stabilité du système, il est nécessaire de refaire périodiquement la calibration main-œil.
Méthodes d’analyse de l’erreur des paramètres extrinsèques
Analyser l’erreur des paramètres extrinsèques dans une configuration ETH
Si le projet a des exigences faibles en matière de précision de préhension (de l’ordre du centimètre), vous pouvez déterminer rapidement si les erreurs des paramètres extrinsèques sont trop importantes en « vérifiant le recouvrement entre le nuage de points du robot et le modèle du robot dans le Visionneur de scène ».
Si le projet exige une haute précision (quelques millimètres), vous pouvez évaluer les paramètres extrinsèques en utilisant la méthode « Analyser l’erreur des paramètres extrinsèques dans une configuration ETH ».
Vérifier grossièrement le degré de coïncidence entre le nuage de points du robot et le modèle du robot dans le Visionneur de scène
Vous pouvez vérifier grossièrement les résultats de calibration en inspectant le degré de coïncidence entre le nuage de points du robot et le modèle du robot dans le Visionneur de scène. Les étapes spécifiques sont les suivantes:
-
Déplacez le corps du robot (son cinquième axe est recommandé) dans le champ de vision de la caméra.
-
Ouvrez Mech-Vision, sélectionnez le projet dans la liste des projets, puis cliquez sur le bouton Calibration de la caméra dans la barre d’outils. La fenêtre Configuration avant la calibration s’affiche.
-
Dans la fenêtre Sélectionner la méthode de calibration, sélectionnez le bouton radio Charger les paramètres de calibration, sélectionnez les paramètres qui ont été calibrés pour le projet, puis cliquez sur le bouton Suivant.
-
Dans la fenêtre Sélectionner l’utilisation des paramètres, sélectionnez le bouton radio Continuer à travailler sur la caméra calibrée, puis cliquez sur le bouton Suivant.
Statut de la caméra devrait être affiché comme connecté. -
Dans la fenêtre Sélectionner la tâche de calibration, sélectionnez le bouton radio Recalculer les paramètres extrinsèques, laissez la case Charger les données de calibration cochée, puis cliquez sur le bouton Calibrer. La fenêtre Calibration s’affiche.
-
À l’étape Calculer les paramètres extrinsèques, cliquez sur le bouton Calculer les paramètres extrinsèques. Cette opération déclenchera la caméra pour capturer des images et générer les nuages de points du robot.
-
Cliquez sur Scene viewer pour vérifier le degré de coïncidence entre le nuage de points du robot et le modèle du robot.
S’il existe un écart significatif entre le nuage de points du robot et le modèle du robot, cela indique que les erreurs des paramètres extrinsèques sont importantes et qu’un recalibrage est nécessaire.
Utiliser l’outil « Analyser l’erreur des paramètres extrinsèques en configuration Eth » pour évaluer les paramètres extrinsèques
Avant d’évaluer les paramètres extrinsèques, veuillez vous assurer que la plaque de calibration est solidement montée sur le dernier joint du robot. Après avoir monté la plaque de calibration, sélectionnez le dans la barre de menus, puis sélectionnez dans la fenêtre Analyse des erreurs.
La procédure d’évaluation des paramètres extrinsèques à l’aide de l’outil « Analyser l’erreur des paramètres extrinsèques en configuration ETH » est la suivante:
-
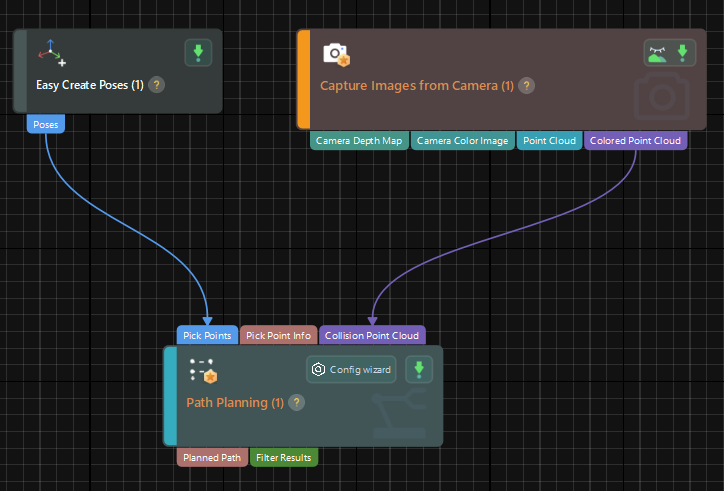
Créez un nouveau projet pour obtenir les poses de la plaque de calibration. Le projet à construire est montré ci-dessous:
-
Synchronisez la pose du robot réel et obtenez le nuage de points de la scène contenant le nuage de points de la plaque de calibration.
-
Sélectionnez l’étape « Planification de trajectoire » dans le projet, et cliquez sur le bouton Ouvrir l’éditeur sur le panneau Paramètres de l’étape pour ouvrir la zone de simulation 3D.
-
Synchronisez la pose du robot réel avec celle du robot simulé dans l’étape « Planification de trajectoire », afin que les poses du robot simulé dans la zone de simulation 3D et du robot réel soient identiques.
-
Cliquez sur le bouton Simuler pour visualiser le nuage de points de la scène contenant la plaque de calibration. (Veuillez ignorer le message d’erreur après avoir cliqué sur Simuler.)
-
-
Créez un TCP virtuel sur la plaque de calibration.
-
Ajoutez un outil d’extrémité aux ressources dans l’outil de planification de trajectoire.
-
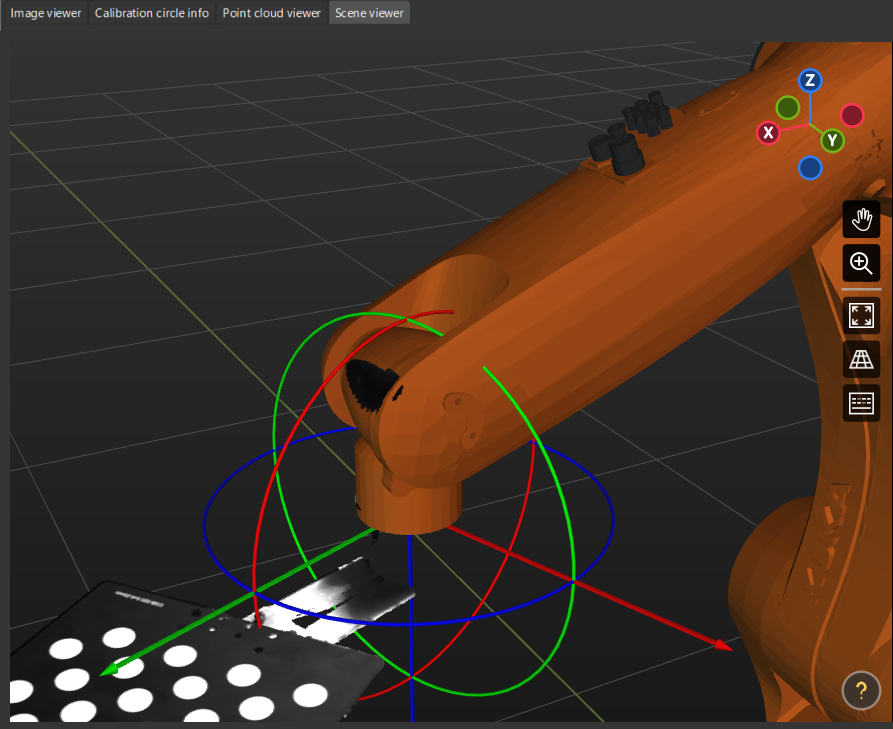
Vérifiez la visualisation de l’outil d’extrémité dans la zone de simulation 3D, et ajustez les paramètres pour faire coïncider le TCP avec un centre de cercle sur la plaque de calibration (l’axe de la pose doit coïncider avec la croix dans le cercle et le plan XOY doit être étroitement aligné avec le plan de calibration).
-
Saisissez un nom et cliquez sur OK pour terminer la création du TCP virtuel.
-
-
Vérifiez les paramètres extrinsèques à d’autres positions dans l’espace de travail.
-
Déplacez le robot réel à l’aide du boîtier d’apprentissage vers d’autres positions de l’espace de travail.
-
Synchronisez la pose du robot réel avec celle du robot simulé dans l’étape « Planification de trajectoire », afin que les poses du robot simulé dans la zone de simulation 3D et du robot réel soient identiques.
-
Cliquez sur le bouton Simuler pour obtenir le nouveau nuage de points de la scène contenant la plaque de calibration.
-
Vérifiez si le TCP virtuel ajouté à l’étape précédente coïncide avec le centre du cercle sur la plaque de calibration.
-
Si l’écart entre le TCP virtuel et le centre du cercle de la plaque de calibration est important, l’erreur des paramètres extrinsèques est élevée et vous devez effectuer à nouveau la calibration main-œil.
Analyser l’erreur des paramètres extrinsèques dans une configuration EIH
Si le projet a des exigences faibles en matière de précision de préhension (de l’ordre du centimètre), vous pouvez déterminer rapidement si les erreurs des paramètres extrinsèques sont trop importantes en « vérifiant le recouvrement entre le nuage de points du robot et le modèle du robot dans le Visionneur de scène ».
Si le projet exige une haute précision (quelques millimètres), vous pouvez évaluer les paramètres extrinsèques en utilisant la méthode « Analyser l’erreur des paramètres extrinsèques dans une configuration EIH ».
Vérifier grossièrement le degré de coïncidence entre le nuage de points du robot et le modèle du robot dans le Visionneur de scène
Vous pouvez vérifier grossièrement les résultats de calibration en inspectant le degré de coïncidence entre le nuage de points du robot et le modèle du robot dans le Visionneur de scène. Les étapes spécifiques sont les suivantes:
-
Déplacez l’effecteur terminal du robot vers une position où la caméra peut capturer la base du robot.
-
Ouvrez Mech-Vision, sélectionnez le projet dans la liste des projets, puis cliquez sur le bouton Calibration de la caméra dans la barre d’outils. La fenêtre Configuration avant la calibration s’affiche.
-
Dans la fenêtre Sélectionner la méthode de calibration, sélectionnez le bouton radio Charger les paramètres de calibration, sélectionnez les paramètres qui ont été calibrés pour le projet, puis cliquez sur le bouton Suivant.
-
Dans la fenêtre Sélectionner l’utilisation des paramètres, sélectionnez le bouton radio Continuer à travailler sur la caméra calibrée, puis cliquez sur le bouton Suivant.
Statut de la caméra devrait être affiché comme connecté. -
Dans la fenêtre Sélectionner la tâche de calibration, sélectionnez le bouton radio Recalculer les paramètres extrinsèques, laissez la case Charger les données de calibration cochée, puis cliquez sur le bouton Calibrer. La fenêtre Calibration s’affiche.
-
À l’étape Calculer les paramètres extrinsèques, cliquez sur le bouton Calculer les paramètres extrinsèques. Cette opération déclenchera la caméra pour capturer des images et générer les nuages de points du robot.
-
Cliquez sur Scene viewer pour vérifier le degré de coïncidence entre le nuage de points du robot et le modèle du robot.
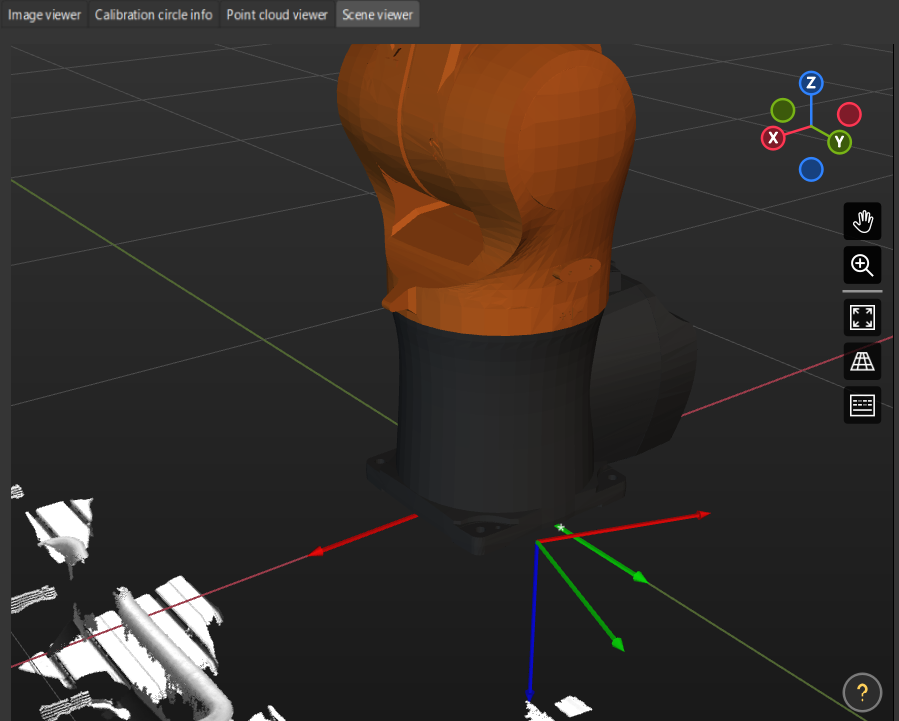
S’il existe un écart significatif entre le nuage de points du robot et le modèle du robot, cela indique que les erreurs des paramètres extrinsèques sont importantes et qu’un recalibrage est nécessaire.
Utiliser l’outil « Analyser l’erreur des paramètres extrinsèques en configuration EIH » pour évaluer les paramètres extrinsèques
Vous pouvez utiliser la méthode « Analyser l’erreur des paramètres extrinsèques en configuration EIH » dans l’outil de calibration pour évaluer les erreurs des paramètres extrinsèques.
Les instructions détaillées sont les suivantes:
-
Ouvrez Mech-Vision, sélectionnez le projet dans la liste des projets, puis cliquez sur le bouton Calibration de la caméra dans la barre d’outils.
-
Dans la fenêtre Configuration avant la calibration, sélectionnez le bouton radio Charger les paramètres de calibration, sélectionnez les paramètres qui ont été calibrés pour le projet, puis cliquez sur le bouton Suivant.
-
Dans la fenêtre Sélectionner l’utilisation des paramètres, sélectionnez le bouton radio Continuer à travailler sur la caméra calibrée, puis cliquez sur le bouton Suivant.
Statut de la caméra devrait être affiché comme connecté. -
Dans la fenêtre Sélectionner la tâche de calibration, sélectionnez le bouton radio Recalculer les paramètres extrinsèques, laissez la case Charger les données de calibration cochée, puis cliquez sur le bouton Calibrer. La fenêtre Calibration s’affiche.
-
À l’étape Calculer les paramètres extrinsèques, cliquez sur le bouton Calculer les paramètres extrinsèques.
-
Dans la zone 2 Outil auxiliaire, cliquez sur Précision des paramètres extrinsèques pour ouvrir l’outil de validation de la précision des paramètres extrinsèques, et sélectionnez « Analyser l’erreur des paramètres extrinsèques en configuration EIH ».
-
Prenez connaissance des instructions d’évaluation de l’erreur des paramètres extrinsèques en configuration EIH, puis cliquez sur le bouton Suivant.
-
Cliquez sur + pour ajouter plusieurs ensembles de poses de la plaque de calibration.
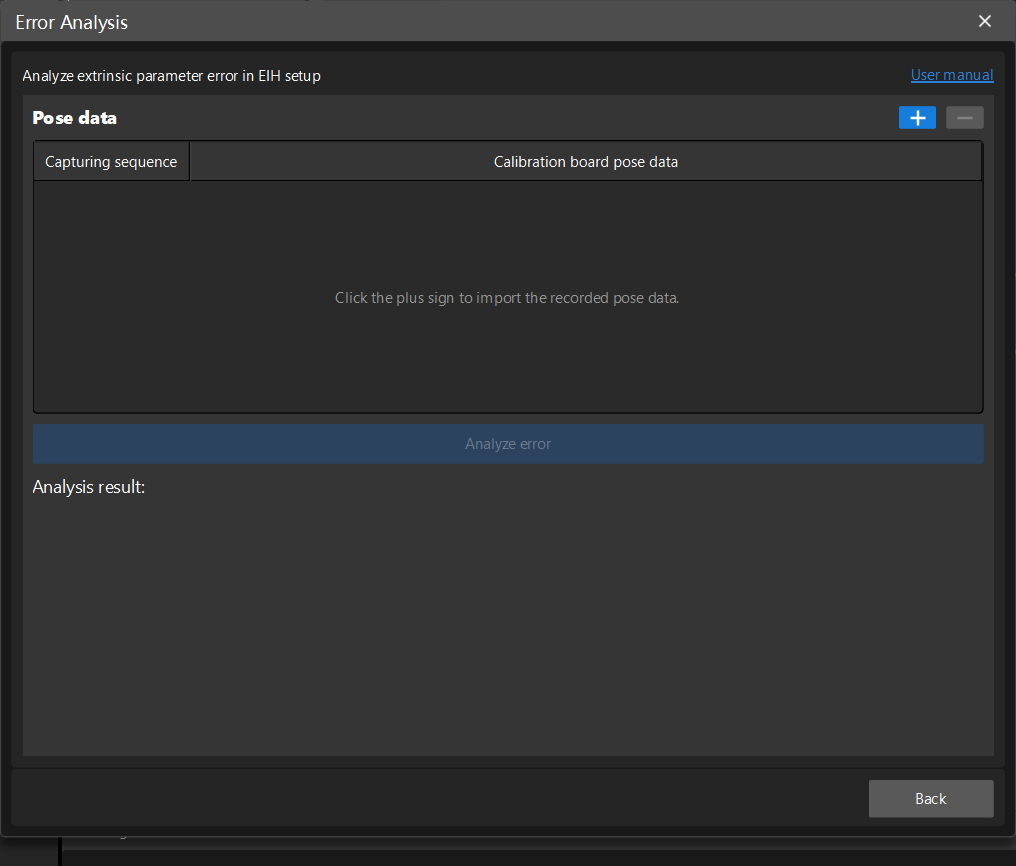
-
Cliquez sur le bouton Analyser l’erreur pour afficher le résultat.
Si l’erreur est importante (supérieure aux exigences de précision de préhension du projet), vous devez effectuer à nouveau la calibration main-œil.