Inspection et Maintenance
Les équipements sur site doivent être vérifiés conformément aux normes d’inspection. Dans la période spécifiée, utilisez les méthodes adéquates pour inspecter le matériel et le logiciel du système de vision afin de détecter précocement les pannes potentielles et d’effectuer une maintenance et des réglages en temps utile.
| Catégorie | Élément | Inspection | Fréquence d’inspection |
|---|---|---|---|
Boîtier de la caméra |
Vérifier si la caméra est entrée en collision avec d’autres objets |
Une fois par jour |
|
Câbles de la caméra |
Vérifier si les câbles de la caméra présentent un vieillissement |
Une fois par jour |
|
Vérifier si les connexions aux deux extrémités des câbles de la caméra sont bien fixées |
Une fois par jour |
||
Vérifier si les câbles sont pliés, tordus ou usés |
Une fois par jour |
||
Cadre de montage de la caméra |
Observer visuellement si le cadre de montage de la caméra présente des signes de déformation ou de déplacement et si les boulons de fixation sont desserrés |
Une fois toutes les deux semaines |
|
IPC |
Vérifier si l’IPC est placé dans un environnement bien ventilé |
Une fois par semaine |
|
Redémarrer l’IPC |
Une fois par semaine |
||
Périphériques de l’IPC |
Vérifier tout jeu au niveau des interfaces des câbles |
Une fois par semaine |
|
Commutateur réseau |
Vérifier si le commutateur réseau fonctionne normalement |
Une fois par semaine |
|
Socle du robot |
Vérifier si le socle du robot vibre |
Une fois tous les six mois |
|
Position zéro du robot |
Vérifier si la position zéro du robot est décalée |
Une fois tous les six mois |
|
Inspection des paramètres intrinsèques et extrinsèques de la caméra |
Paramètres intrinsèques de la caméra |
Vérifier si les paramètres intrinsèques de la caméra se sont dégradés |
Une fois tous les six mois |
Paramètres extrinsèques de la caméra |
Vérifier si les paramètres extrinsèques de la caméra se sont dégradés |
Une fois tous les six mois |
Inspection de la caméra et des accessoires
Boîtier de la caméra
Le boîtier de la caméra est une structure essentielle qui protège les composants internes de précision et maintient l’étanchéité de la caméra. Il nécessite une maintenance et un entretien quotidiens réguliers. La fréquence d’inspection recommandée est d’une fois par jour.
Les collisions de la caméra peuvent être évaluées en inspectant visuellement la présence de bosses, déformations ou rayures sur son extérieur. En cas de collision, vous devez vérifier à l’aide du logiciel si la précision des paramètres intrinsèques et extrinsèques a changé. Le cas échéant, vous devez cesser de l’utiliser pour garantir la sécurité, et la caméra doit être remplacée ou les paramètres extrinsèques recalibrés dès que possible. (Pour les procédures spécifiques de vérification des paramètres intrinsèques et extrinsèques, veuillez vous reporter à la section « Inspection des paramètres intrinsèques et extrinsèques de la caméra ».)

Câbles de la caméra
Les câbles de la caméra comprennent le câble d’alimentation et le câble Ethernet. Le câble d’alimentation fournit la tension stable nécessaire à la caméra 3D, tandis que le câble Ethernet assure un environnement de transmission de données stable pour la communication entre la caméra 3D et l’IPC. Tous deux doivent être inspectés régulièrement dans le cadre de la maintenance quotidienne. La fréquence d’inspection recommandée est d’une fois par jour.
Il est nécessaire de vérifier régulièrement si les câbles présentent un vieillissement et si les connexions aux deux extrémités des câbles de la caméra sont bien fixées. Si les câbles passent à travers un dresspack de robot, en plus de vérifier les connexions aux deux extrémités, vous devez également vérifier si les câbles présentent des signes de pliure, de torsion ou d’usure en fonction de l’usure des dresspacks. En cas de problème, veuillez contacter Mech-Mind pour remplacer les câbles.

| Déconnectez l’alimentation si la caméra ne sera pas utilisée pendant une longue période. |
Cadre de montage de la caméra
Le cadre de montage de la caméra est une structure de fixation essentielle pour la caméra 3D. La stabilité du cadre affecte directement la précision des paramètres extrinsèques de la caméra 3D, il doit donc être inspecté régulièrement. La fréquence d’inspection recommandée est d’une fois toutes les deux semaines.
Vous pouvez déterminer si la caméra est correctement fixée en observant visuellement si le cadre de montage de la caméra présente des signes de déformation ou de déplacement et si les boulons de connexion sont desserrés. Si l’inspection échoue, vous devez vérifier à l’aide du logiciel si la précision des paramètres intrinsèques et extrinsèques a changé. Le cas échéant, vous devez cesser de l’utiliser pour garantir la sécurité, et les paramètres extrinsèques doivent être recalibrés dès que possible. (Pour les procédures spécifiques de vérification des paramètres intrinsèques et extrinsèques, veuillez vous reporter à la section « Inspection des paramètres intrinsèques et extrinsèques de la caméra ».)

Inspection de l’IPC et du commutateur réseau
-
Le logiciel de vision 3D est installé sur l’IPC, et l’état de l’IPC affecte directement les performances et le temps de calcul du logiciel de vision. Pour garantir que l’IPC fonctionne correctement, il est nécessaire d’effectuer des inspections régulières. La fréquence d’inspection recommandée est d’une fois par semaine.
-
Le commutateur réseau et les câbles Ethernet sont utilisés pour les connexions réseau entre les équipements. Des inspections régulières peuvent aider à réduire les défaillances de communication réseau. La fréquence d’inspection recommandée est d’une fois par semaine.
-
Périphériques de l’IPC : Les composants clés incluent l’alimentation de l’IPC, les câbles Ethernet et le dispositif de licence logiciel (clé de licence) ; les composants non clés incluent les câbles du clavier et de la souris, ainsi que les câbles vidéo HDMI. Pour assurer un fonctionnement stable de l’IPC, vérifiez régulièrement tout jeu au niveau des interfaces des câbles. La fréquence d’inspection recommandée est d’une fois par semaine.

-
Il est recommandé de placer l’IPC dans un environnement bien ventilé et de redémarrer régulièrement l’IPC afin d’assurer un fonctionnement plus stable. Veillez à ce que l’IPC ne soit pas placé dans un espace clos ou exigu, et évitez de poser des objets sans rapport sur sa surface. Les orifices de ventilation de l’IPC doivent rester dégagés, et il doit y avoir au moins 5 cm d’espace libre autour de l’IPC pour éviter la surchauffe. La fréquence d’inspection recommandée est d’une fois par semaine.
Inspection du robot
Le robot est le mécanisme d’exécution du flux de travail, et sa précision affecte directement la précision de la prise.
-
Socle du robot : Vérifier si le socle du robot tremble. Le cas échéant, cessez d’utiliser le robot, refixez la fondation et recalibrez les paramètres extrinsèques. La fréquence d’inspection recommandée est d’une fois tous les six mois.
-
Position zéro du robot : Un décalage du point zéro peut entraîner des variations de précision du robot. Veuillez vérifier la position zéro en vous référant au guide d’exploitation du robot concerné. S’il existe un décalage du point zéro du robot, cessez de l’utiliser, recalibrez la position zéro et les paramètres extrinsèques. La fréquence d’inspection recommandée est d’une fois tous les deux mois.
Inspection des paramètres intrinsèques et extrinsèques de la caméra
Pour le logiciel de la caméra, vérifiez principalement ses paramètres intrinsèques et extrinsèques. Ces deux paramètres affectent la précision de la reconnaissance visuelle. La fréquence d’inspection recommandée est d’une fois tous les deux mois. (La vérification des paramètres intrinsèques et extrinsèques de la caméra nécessite l’utilisation d’un logiciel de vision. Veuillez opérer sous la guidance d’un technicien.)
|
De plus, veuillez préchauffer la caméra avant de vérifier ses paramètres intrinsèques et extrinsèques. La caméra ne peut pas garantir efficacement la précision de la reconstruction du nuage de points tant que l’équilibre thermique n’est pas atteint. Veuillez utiliser l’une des méthodes suivantes pour chauffer la caméra :
|
Méthode de vérification des paramètres intrinsèques
Placez la plaque de calibration directement sous la caméra, en veillant à ce que la distance entre la plaque et la caméra soit aussi proche que possible de la longueur focale de la caméra. La plaque de calibration doit être aussi parallèle que possible au dessous de la caméra, puis procédez aux opérations logicielles.
-
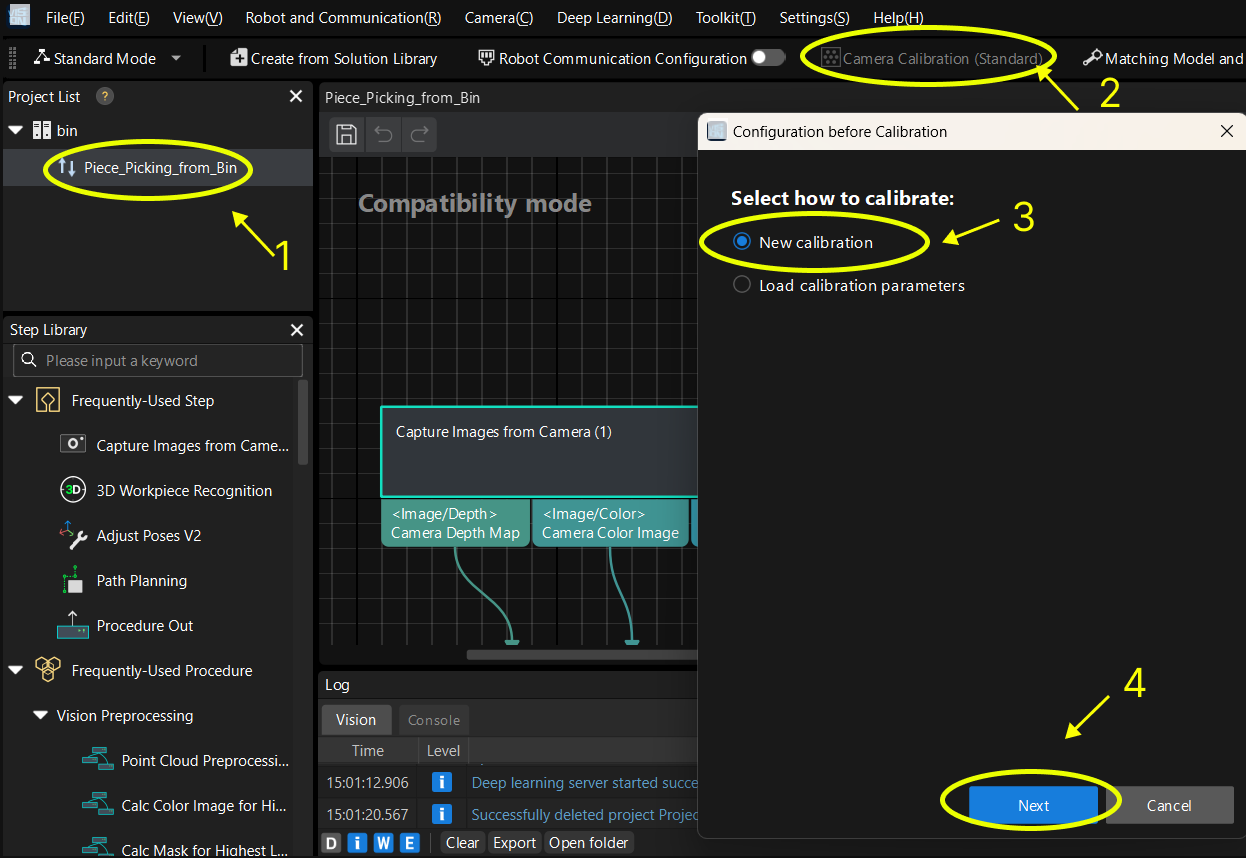
Ouvrez le logiciel Mech-Vision, sélectionnez le projet, cliquez sur le bouton Étalonnage de la caméra, sélectionnez Nouvel étalonnage, puis cliquez sur le bouton Suivant.
-
Après avoir confirmé que les vérifications préalables à l’étalonnage sont terminées, cliquez sur J’ai terminé toutes les vérifications, puis cliquez sur Suivant.
-
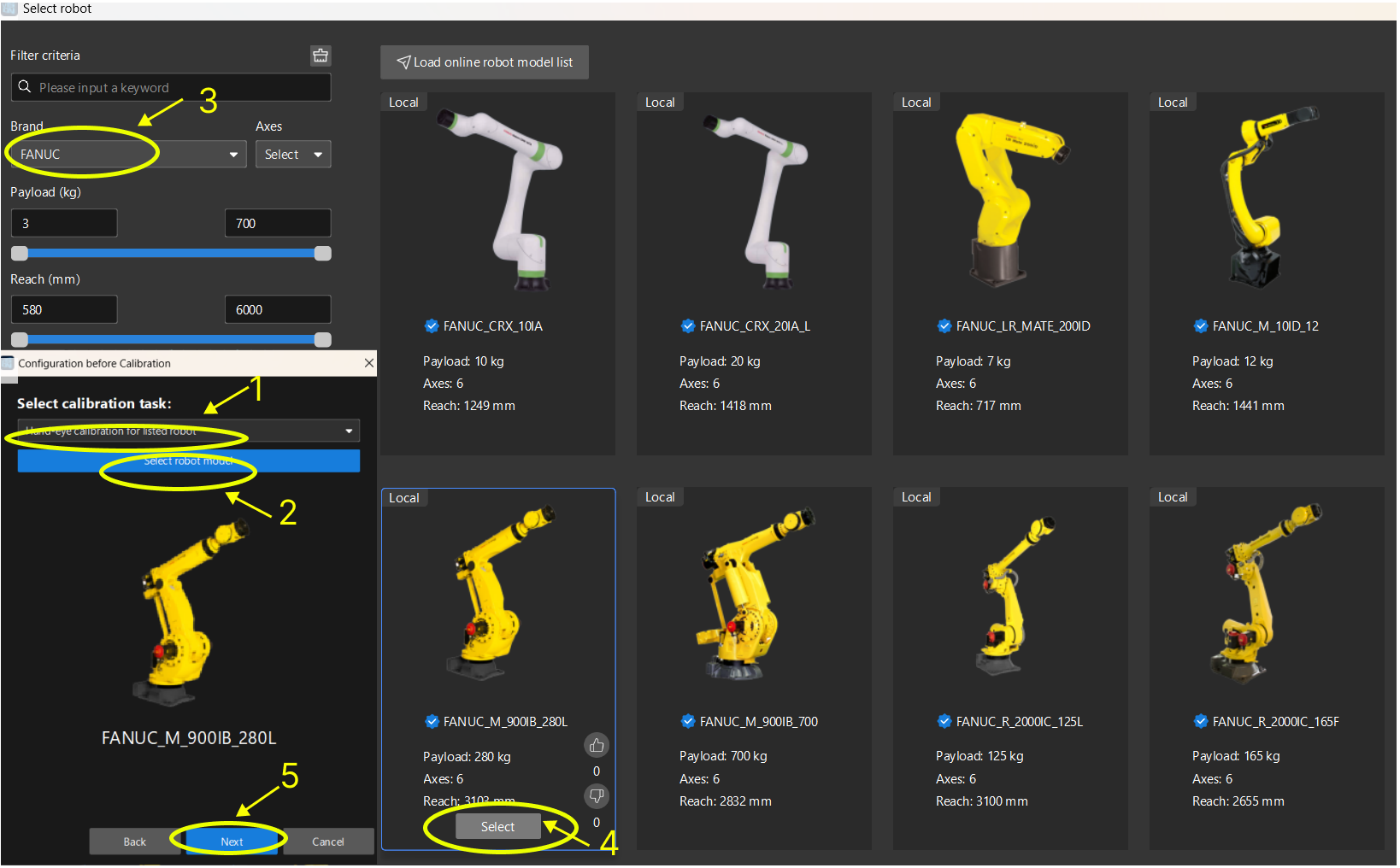
Sélectionnez le modèle de robot en fonction des conditions du site, puis cliquez sur le bouton correspondant.
-
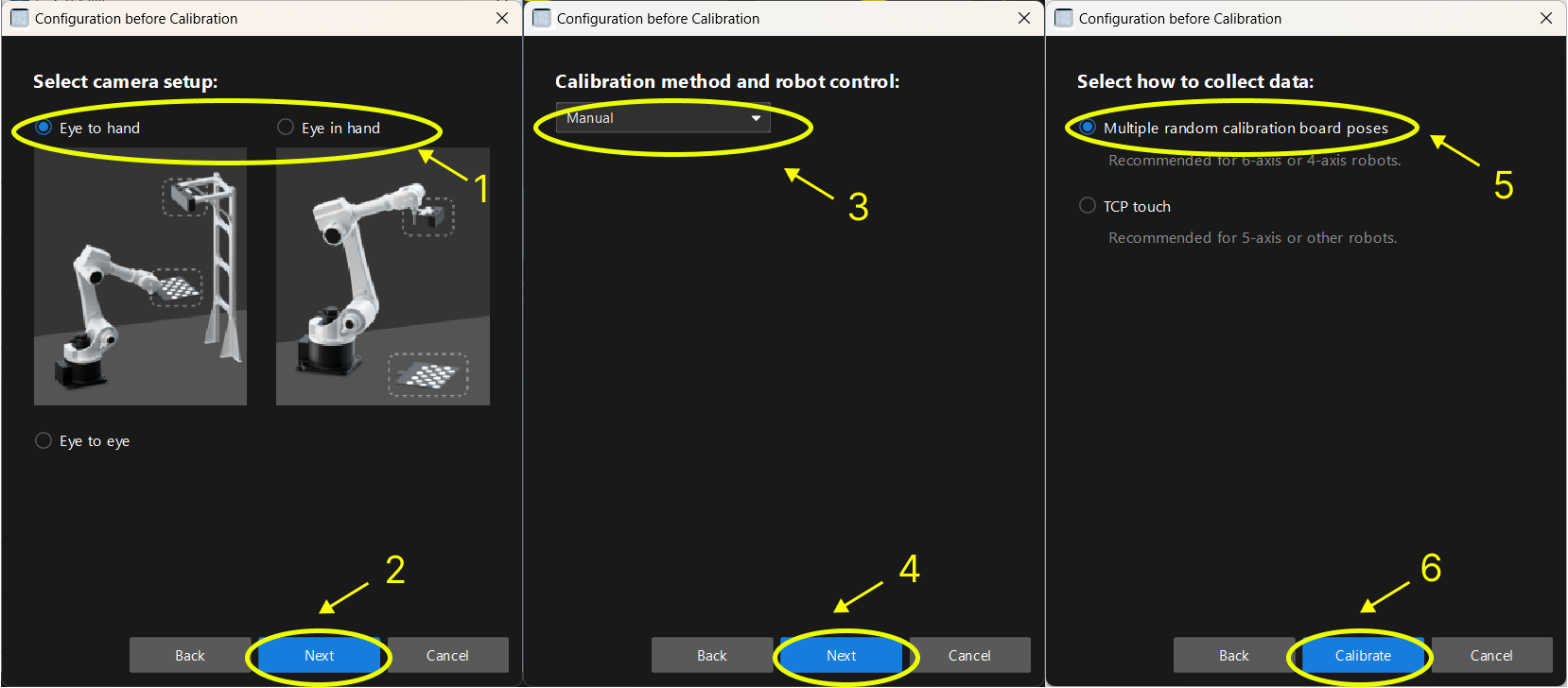
Sélectionnez la méthode de montage de la caméra (choisissez Œil vers main si la caméra est montée sur un cadre fixe, ou Œil dans la main si elle est montée sur le robot), puis cliquez sur le bouton correspondant.
-
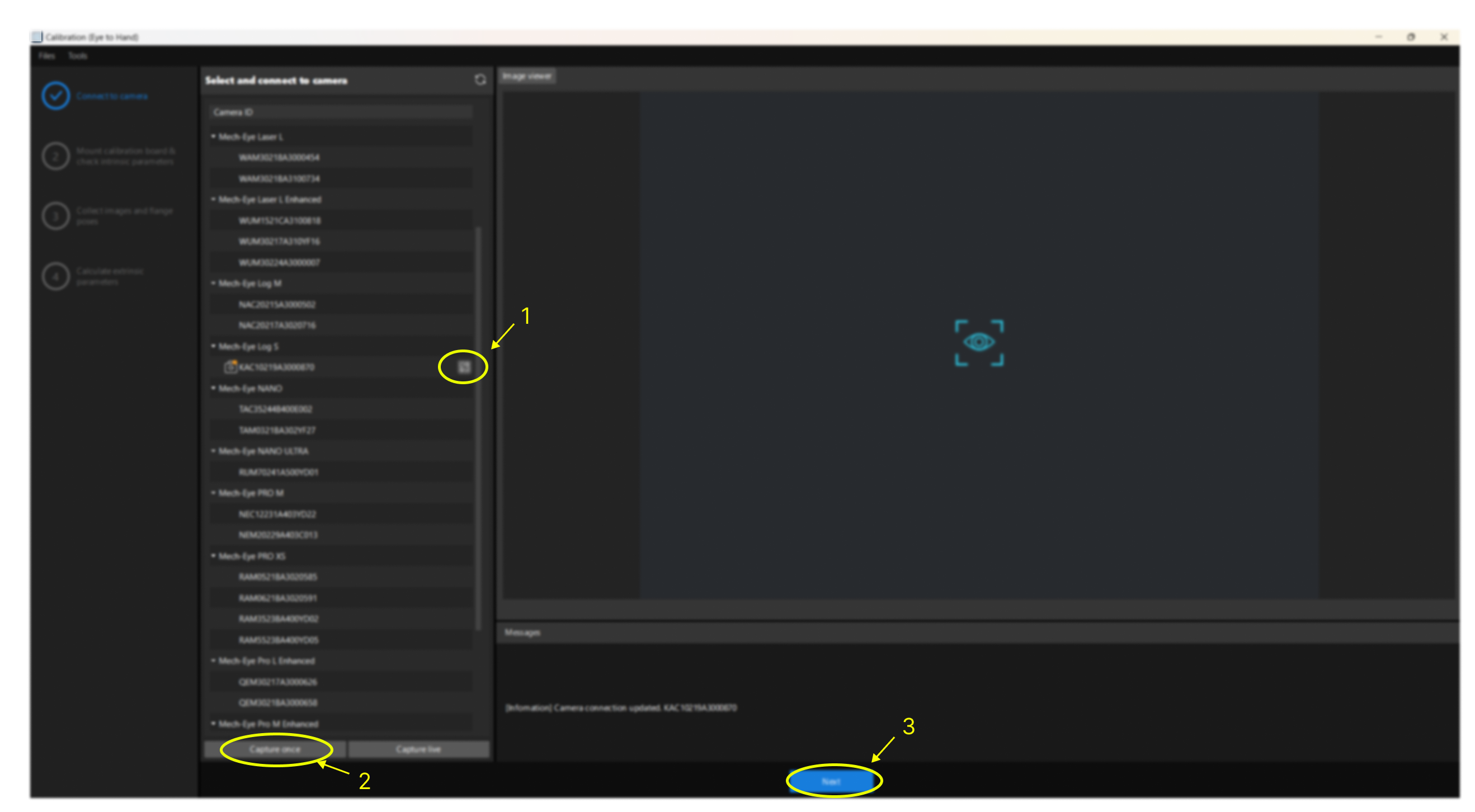
À l’étape Connexion à la caméra, sélectionnez la caméra correspondante→Cliquez sur le bouton « Connecter »→Capturez une fois. Puis cliquez sur le bouton Suivant après avoir confirmé que l’image 2D et la carte de profondeur de la caméra sont normales.
-
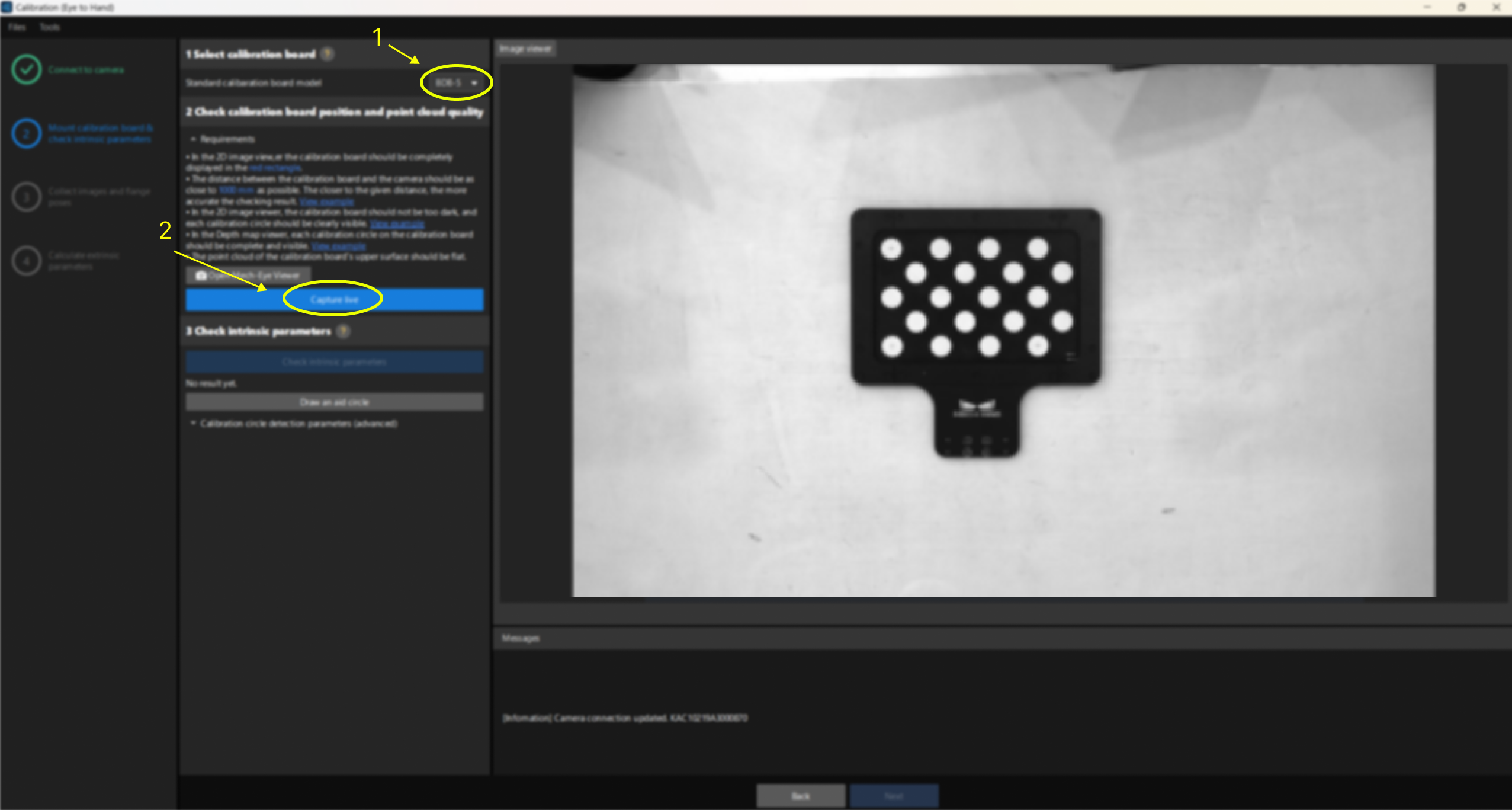
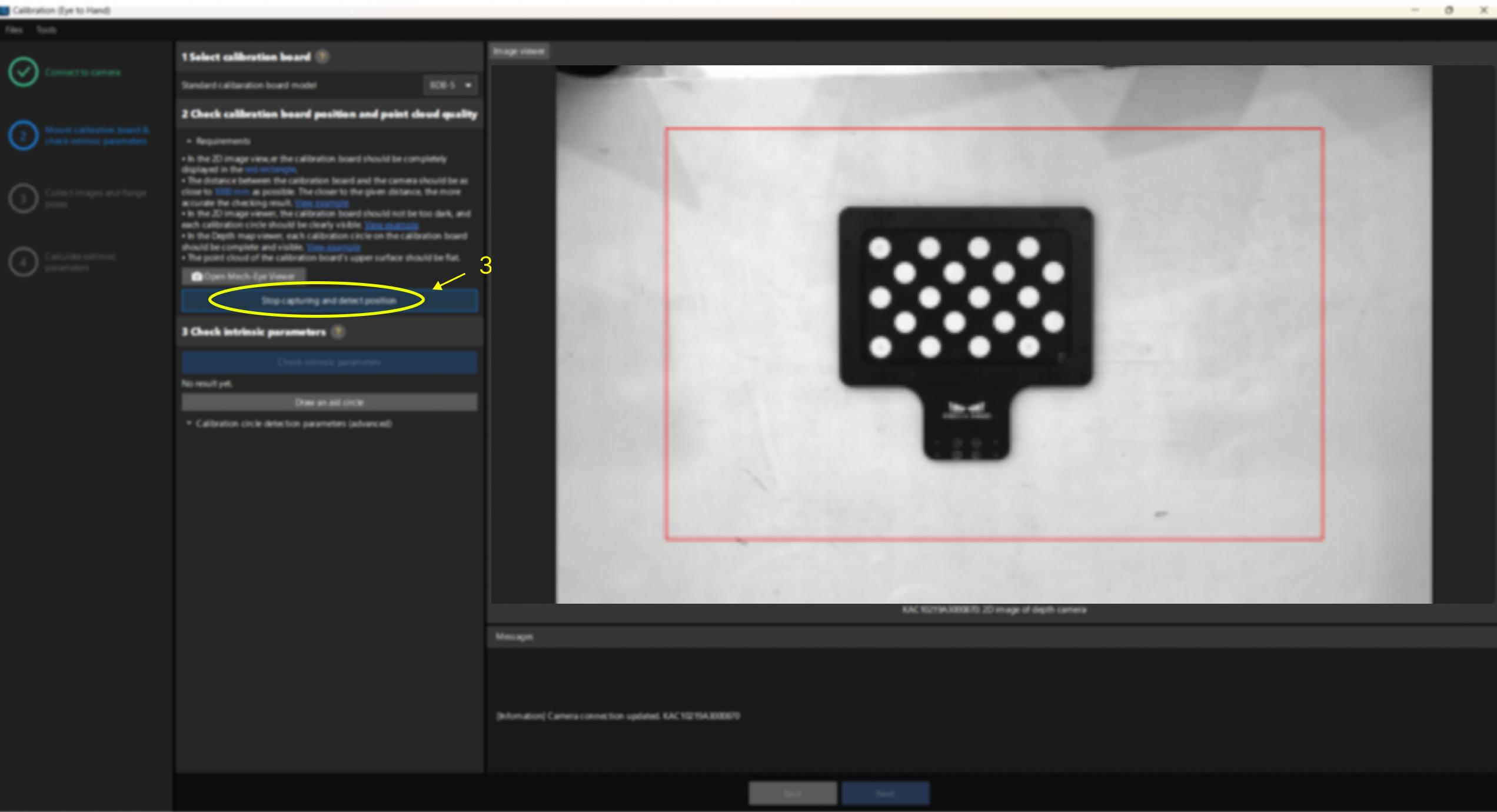
À l’étape Monter la plaque de calibration et vérifier les paramètres intrinsèques, sélectionnez le modèle de plaque de calibration correspondant (le modèle est indiqué sur la plaque), et cliquez sur Capture en direct, en veillant à ce que la plaque de calibration soit dans le cadre rouge de la vue de droite. Ensuite, cliquez sur le bouton Arrêter la capture et détecter la position.
-
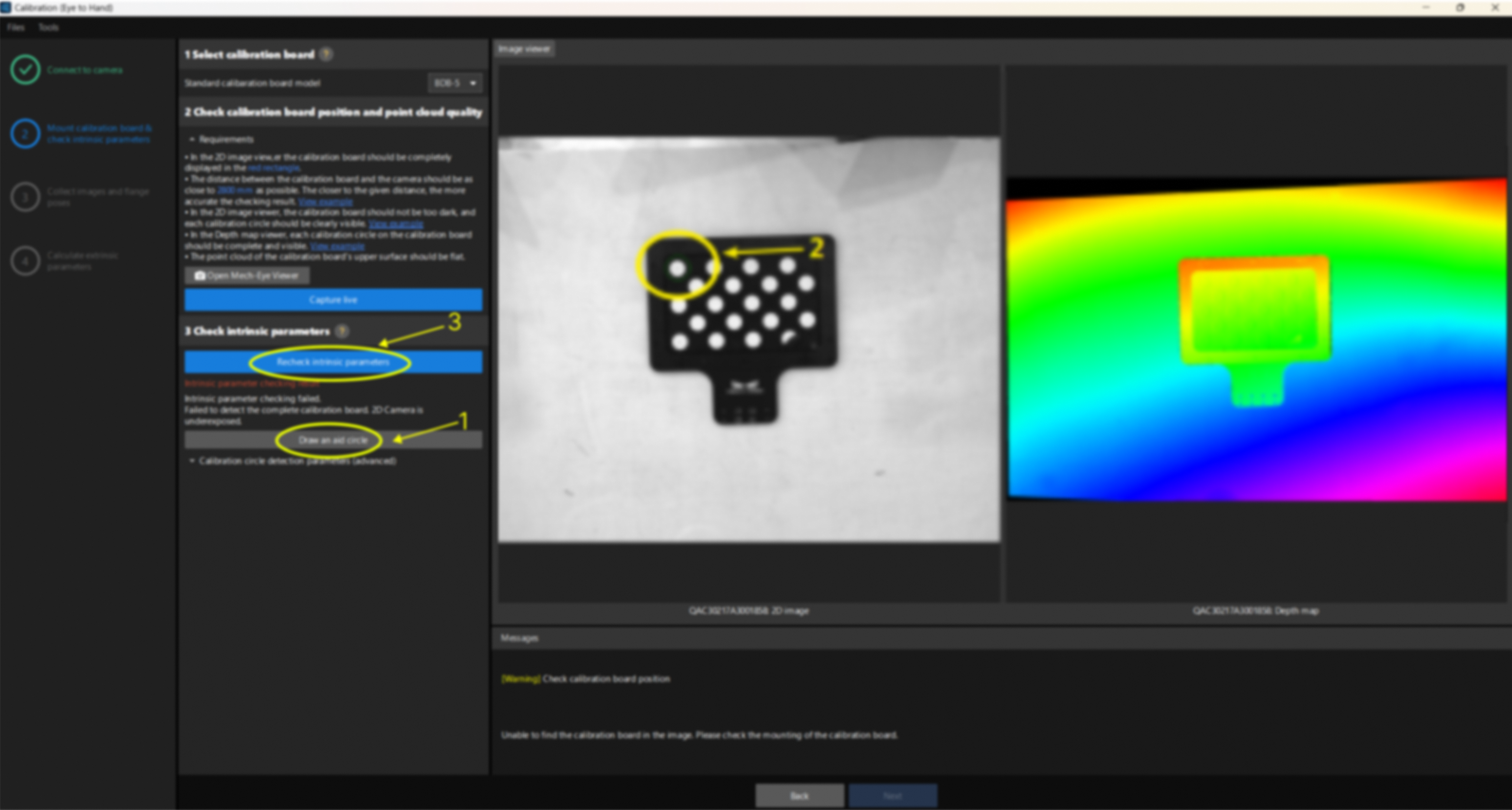
Cliquez sur Vérifier les paramètres intrinsèques.
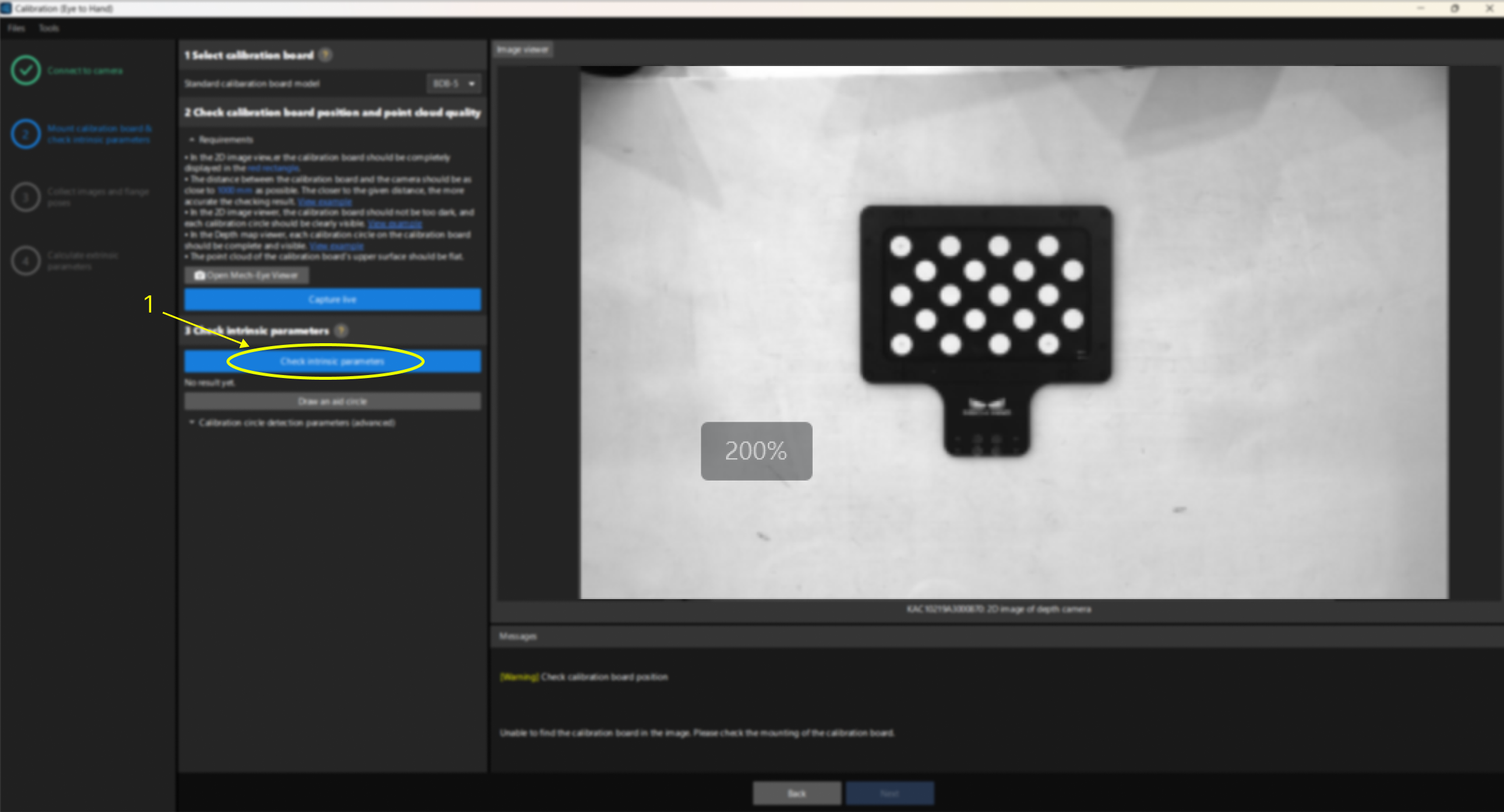
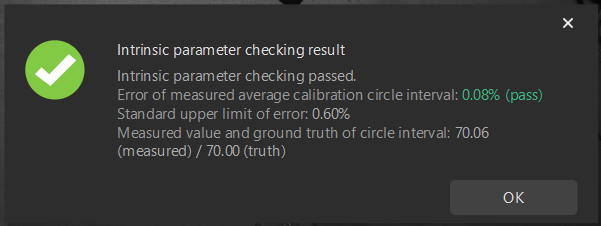
Si la détection réussit, l’affichage sera comme ci-dessous. Si l’erreur des paramètres intrinsèques dépasse la plage normale, les informations affichées deviendront rouges. Dans ce cas, vous devrez rechercher la cause et recalibrer les paramètres intrinsèques de la caméra.
En cas d’échec de détection comme ci-dessous, cliquez sur OK, puis poursuivez avec l’opération de dessin d’un cercle d’aide.
-
Si la vérification des paramètres intrinsèques échoue, vous pouvez dessiner un cercle d’aide : Cliquez sur le bouton « Dessiner un cercle d’aide »→Utilisez la souris pour dessiner un cercle autour d’un point blanc sur la plaque de calibration de droite→Cliquez sur « Vérifier de nouveau ».
Méthode de vérification des paramètres extrinsèques (Applicable uniquement lorsque le robot possède un modèle)
Vous pouvez vérifier approximativement les paramètres extrinsèques en contrôlant le degré de coïncidence entre le nuage de points du robot et le modèle du robot. Pour les scénarios haute précision (dans ±2 mm), vous pouvez utiliser l’outil de validation de l’exactitude des paramètres extrinsèques pour valider en profondeur les paramètres extrinsèques.
Vérification approximative du degré de coïncidence entre le nuage de points du robot et le modèle du robot (ETH)
-
Déplacez le corps du robot (son cinquième axe est recommandé) dans le champ de vision de la caméra.
-
Ouvrez Mech-Vision, et cliquez sur le bouton Étalonnage de la caméra dans la barre d’outils.
-
Dans la fenêtre Configuration avant étalonnage, sélectionnez Charger les paramètres d’étalonnage à l’étape Sélectionner la méthode d’étalonnage, sélectionnez Continuer à travailler sur la caméra étalonnée à l’étape Sélectionner l’utilisation de l’étalonnage, sélectionnez Recalibrer les paramètres extrinsèques à l’étape Sélectionner la tâche d’étalonnage, puis cliquez sur le bouton Calibrer.
-
À l’étape Calculer les paramètres extrinsèques de la fenêtre d’étalonnage, cliquez sur le bouton Capture par la caméra dans la zone 2 Outil auxiliaire. Cette opération déclenchera la capture d’images par la caméra.
-
Dans le panneau de droite Visionneuse de scène, vérifiez visuellement le degré de coïncidence entre le nuage de points du robot réel et le modèle du robot.
Si le nuage de points du robot coïncide approximativement avec le modèle du robot, la calibration est réussie.
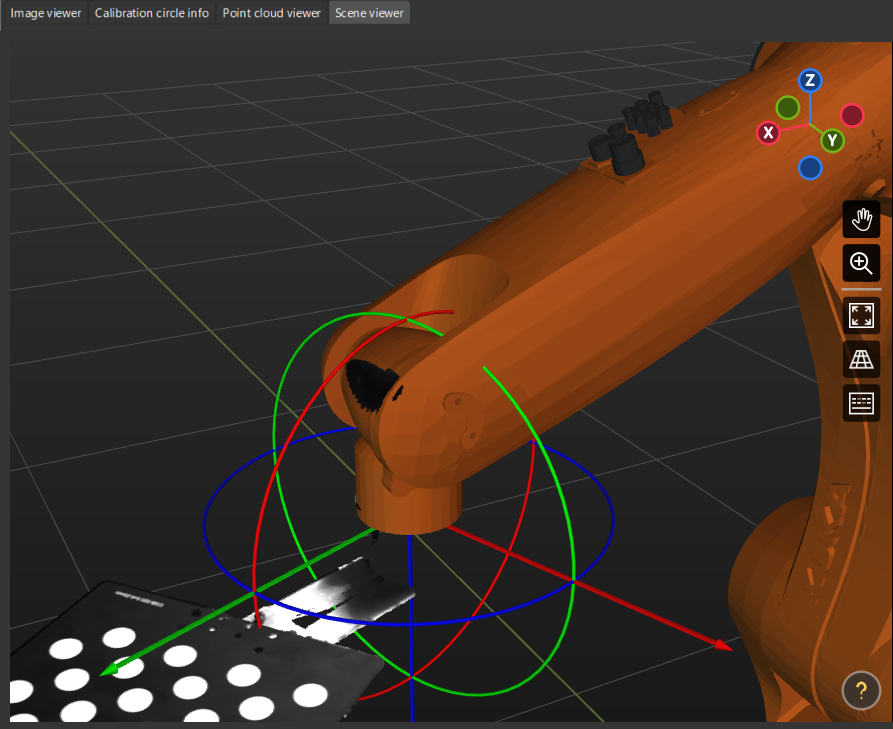
Vérification approximative du degré de coïncidence entre le nuage de points du robot et le modèle du robot (EIH)
-
Déplacez l’effecteur terminal du robot vers une position où la caméra peut capturer le socle du robot.
-
Ouvrez Mech-Vision, sélectionnez le projet dans la liste des projets, puis cliquez sur le bouton Étalonnage de la caméra dans la barre d’outils.
-
Dans la fenêtre Configuration avant étalonnage, sélectionnez Charger les paramètres d’étalonnage à l’étape Sélectionner la méthode d’étalonnage, sélectionnez Continuer à travailler sur la caméra étalonnée à l’étape Sélectionner l’utilisation de l’étalonnage, sélectionnez Recalibrer les paramètres extrinsèques à l’étape Sélectionner la tâche d’étalonnage, puis cliquez sur le bouton Calibrer.
-
À l’étape Calculer les paramètres extrinsèques de la fenêtre d’étalonnage, cliquez sur le bouton Capture par la caméra dans la zone 2 Outil auxiliaire. Cette opération déclenchera la capture d’images par la caméra.
-
Dans le panneau de droite Visionneuse de scène, vérifiez visuellement le degré de coïncidence entre le nuage de points du robot réel et le modèle du robot.
Si le nuage de points du robot coïncide approximativement avec le modèle du robot, la calibration est réussie.
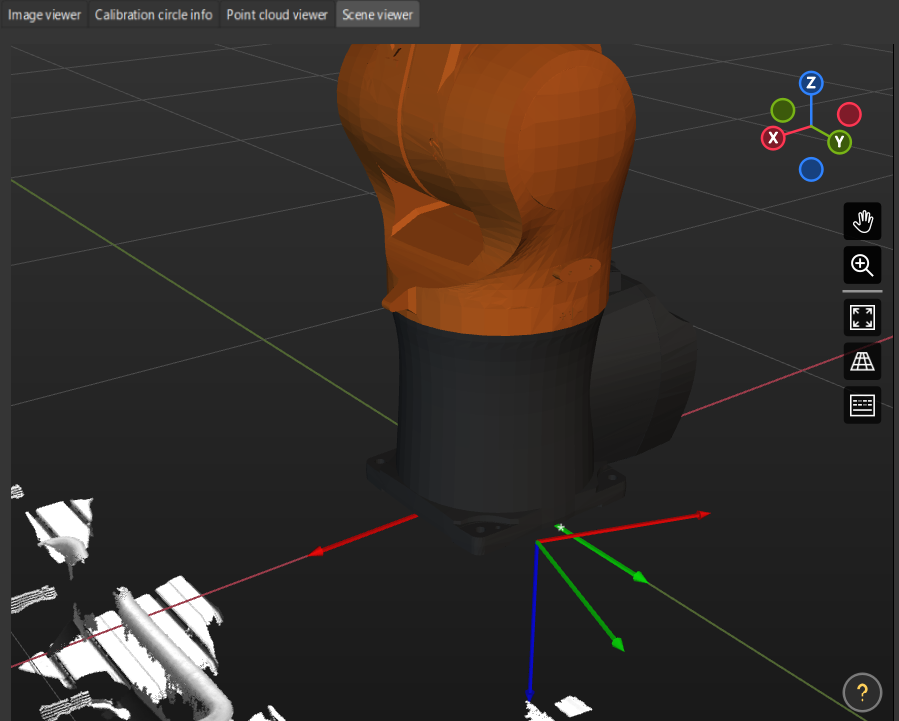
Utiliser l’outil de validation de l’exactitude des paramètres extrinsèques pour valider les paramètres extrinsèques
Pour les scénarios haute précision (dans ±2 mm), cette méthode doit être utilisée pour valider en profondeur les paramètres extrinsèques.
-
Ouvrez Mech-Vision, et cliquez sur le bouton Étalonnage de la caméra dans la barre d’outils.
-
Dans la fenêtre Configuration avant étalonnage, sélectionnez Charger les paramètres d’étalonnage à l’étape Sélectionner la méthode d’étalonnage, sélectionnez Continuer à travailler sur la caméra étalonnée à l’étape Sélectionner l’utilisation de l’étalonnage, sélectionnez Recalibrer les paramètres extrinsèques à l’étape Sélectionner la tâche d’étalonnage, puis cliquez sur le bouton Calibrer.
-
À l’étape Calculer les paramètres extrinsèques de la fenêtre d’étalonnage, cliquez sur le bouton Calculer les paramètres extrinsèques.
-
Dans la zone 2 Outil auxiliaire, cliquez sur Exactitude des paramètres extrinsèques pour ouvrir l’outil de validation de l’exactitude des paramètres extrinsèques.
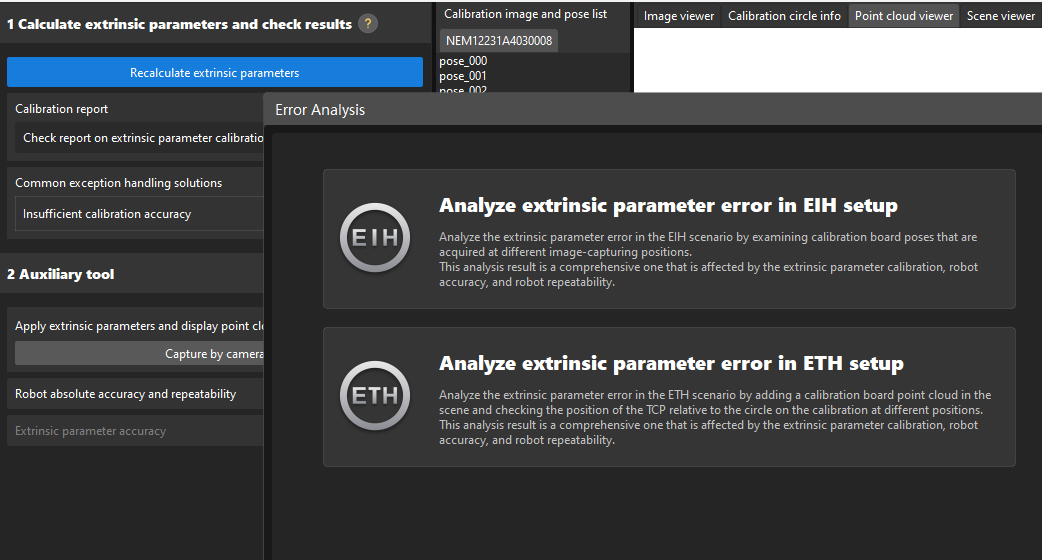
-
Veuillez vous référer aux instructions de l’outil pour valider l’exactitude des paramètres extrinsèques et générer le rapport d’évaluation final.