The Vision System Has Not Output Any Results
This section introduces issues related to the Vision System not outputting results and provides solutions.
Issues with the Vision System not outputting results often occur alongside other problems. Please address these issues based on the specific symptoms observed.
Image Capturing Error
| Symptom | Solutions |
|---|---|
Cameras cannot be found by Mech-Eye Viewer. |
Please refer to Camera Not Discovered for troubleshooting. |
Mech-Vision cannot capture images using the camera that can be found by Mech-Eye Viewer. |
Please refer to Mech-Vision cannot capture images using the camera that can be found by Mech-Eye Viewer for troubleshooting. |
The camera is disconnected occasionally during stable production. |
Please refer to Camera Disconnected Occasionally for troubleshooting. |
Point cloud loss refers to the occasional phenomenon that the acquired point cloud has some missing parts. |
Please refer to Point Cloud Loss for troubleshooting. |
Image acquisition time is too long. |
Please refer to Image Acquisition Time Too Long for troubleshooting. |
No Point Cloud in the 3D ROI
Symptom:
The Vision System did not output results to the robot or PLC, and there was no point cloud in the 3D ROI.
The common steps of setting 3D ROI include: “3D Target Object Recognition”, “Extract 3D Points in 3D ROI”
Possible Cause:
Inappropriate 3D ROI settings.
Solution:
Please refer to Set Proper 3D ROI.
No Output from Deep Learning Inference
Symptom:
When the “Deep Learning Model Package Inference” Step is used in the Mech-Vision project, the inference result is null.
Possible Cause:
Confidence threshold is set too high.
Solution:
In the Step Parameters tab of the “Deep Learning Model Package Inference” Step, decrease the value of Instance Segmentation Confidence Threshold parameter.
If the issue still exists, please contact Technical Support.
No 3D Matching Result
Symptom:
No matching results for the 3D Matching-related Steps or “3D Target Object Recognition” Step.
Possible Causes:
-
The step has no point cloud input.
-
The Confidence Threshold of the “3D Fine Matching” or “3D Target Object Recognition” Step is set too high, which leads to all matching results being filtered out.
-
The incoming materials change, and the point cloud model of the target object does not match the actual target object to be matched.
Solution:
Please address the issue by the following steps:
-
In Mech-Vision, double-click the data flow above the 3D Matching-related Steps or “3D Target Object Recognition”, and check the Debug Output window to see if there is any point cloud data.
-
If so, please execute the next step.
-
If not, please refer to Inappropriate 3D ROI Settings for troubleshooting or check if clustering and filtering parameters are improperly configured, which might cause the point cloud of the target object to be filtered out.
-
-
Select the “3D Fine Matching” or “3D Target Object Recognition” Step, lower its confidence threshold and execute the single step. Then check if there are any matching results in the Debug Output window.
-
If so, please execute the next step.
-
If not, please contact Technical Support.
-
-
In the Debug Output window, check whether the point cloud of the object to be matched is consistent with the point cloud model.
-
If so, the troubleshooting is completed.
-
If not, please recreate a point cloud model for the target object and modify the model called by the Steps.
-
Mech-Vision Project Execution Timeout
Symptom:
The Vision System did not output results to the robot or PLC, and the Console tab in the Mech-Vision’s Log panel shows “[1019]: Mech-Vision Execution Timeout”.
Solution:
Please address the issue by the following steps:
-
Please check if the IPC’s disk is full.
-
If so, please clean up the disk promptly and execute the next step.
-
If not, please execute the next step.
-
-
Please refer to 1019 Error Code for troubleshooting.
-
If the issue still exists, please contact Technical Support.
Extrinsic Parameter File Is Missing or Damaged
Symptom:
The contents of camera extrinsic parameter files (the file calibration/Camera ID/extri_param.json in the Mech-Vision project directory) are missing.
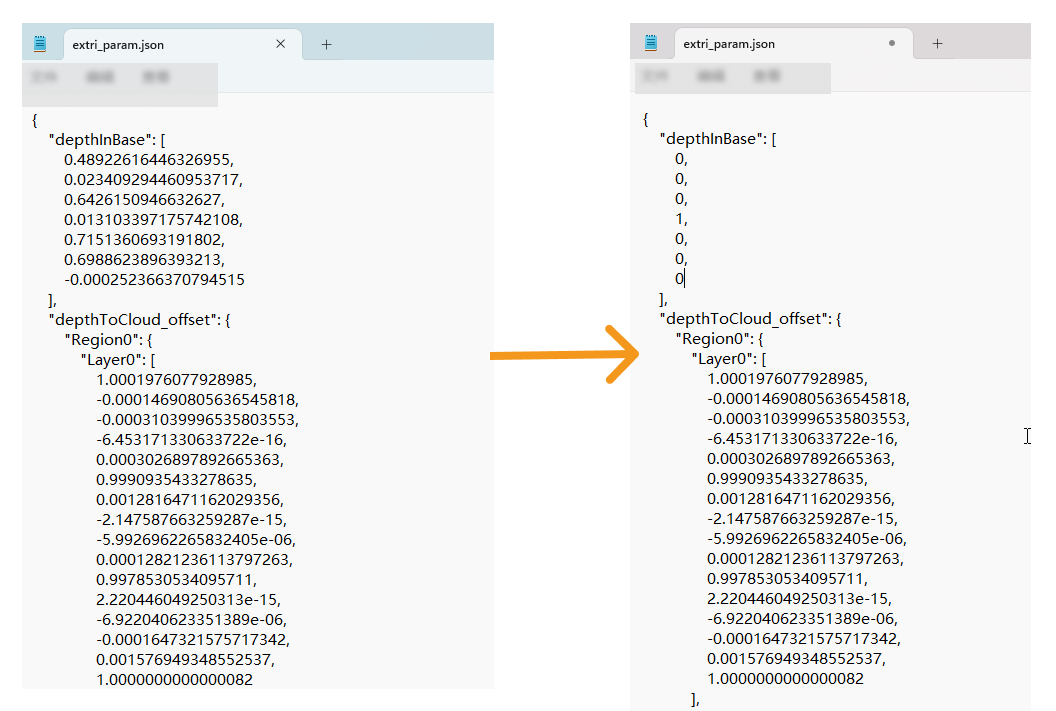
Possible Cause:
An unexpected power outage on the IPC leads to the loss of the extrinsic parameter file contents.
Solution:
Please restore it using the backup extrinsic parameter files, or refer to Hand-Eye Re-Calibration.
Data Flow between Steps Is Interrupted
Symptom:
Due to software upgrades, power outages, or incorrect operations, the data flow connections between Steps may be interrupted.
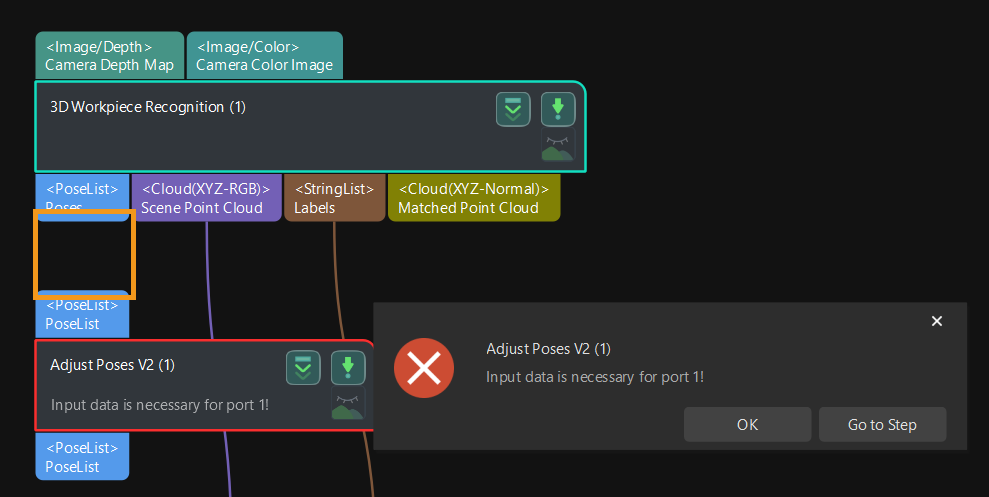
Solution:
Reconnect the ports between the Steps.
Mech-Vision Crashes or Has Insufficient Memory
Symptom:
Due to the IPC running out of memory, the following issues may occur:
-
Error message “bad allocation” is recorded in the Mech-Vision’s log panel.
-
Mech-Vision is unresponsive for an extended period.
-
Mech-Vision crashes.
Solution:
-
If “bad allocation” is recorded in the log, please refer to Insufficient Memory for troubleshooting.
-
Verify if the target object model is too large and has not been downsampled. If so, try to recreate a point cloud model and downsample the point cloud properly to reduce the calculation workload.
-
Regularly restart the IPC. It is recommended to do it once a week.
Robot Cannot Reach the Waypoint
Symptom:
The robot cannot reach the waypoint, and there are error logs.
-
If the project uses Mech-Vision for path planning, then “[1030] Mech-Vision: Robot cannot reach the waypoint” will be recorded in the Console tab of Mech-Vision’s Log panel.
-
If the project uses Mech-Viz for path planning, then “[2004] Mech-Viz: Robot cannot reach the waypoint” will be recorded in the Console tab of Mech-Vision’s Log panel.
Solution:
Please refer to 1030 Error Code or 2004 Error Code for troubleshooting. If the issue still exists, please contact Technical Support.
Mech-Viz Project Execution Timeout
Symptom:
The Vision System did not output results to the robot or PLC, and the Console tab in the Mech-Vision’s Log panel shows “[2025] Mech-Viz: Execution Timeout”.
Solution:
Please address the issue by the following steps:
-
Please check if the IPC’s disk is full.
-
If so, please clean up the disk promptly and execute the next step.
-
If not, please execute the next step.
-
-
Please refer to 2025 Error Code for troubleshooting.
-
If the issue still exists, please contact Technical Support.
Mech-Viz: No Vision Result Received from Vision Service
Symptom:
The Vision System did not output results to the robot or PLC, and the Console tab in the Mech-Vision’s Log panel shows “[2037] Mech-Viz: No vision result received from vision service”.
Solution:
Please refer to 2037 Error Code for troubleshooting. If the issue still exists, please contact Technical Support.
Mech-Viz: Motion Singularity Error
Symptom:
The Vision System did not output results to the robot or PLC, and the Console tab in the Mech-Vision’s Log panel shows “[2020] Mech-Viz: Motion singularity error”.
Solution:
Please refer to 2020 Error Code for troubleshooting. If the issue still exists, please contact Technical Support.
Mech-Viz: Robot Collision Detected
Symptom:
he Vision System did not output results to the robot or PLC, and the Console tab in the Mech-Vision’s Log panel shows “[2031] Mech-Viz: Robot collision detected”.
Solution:
Please refer to 2031 Error Code for troubleshooting. If the issue still exists, please contact Technical Support.