Remake Point Cloud Model and Pick Point
Introduction to Point Cloud Model and Pick Point
What Is Point Cloud Model?
In 3D matching, the point cloud model is a three-dimensional dataset used to represent and describe the surface shape of an object. It represents a specific geometric shape or object and serves as a standard for comparison to identify and analyze similar structures or objects in other point cloud data.
Point cloud model can not only describe the whole target object, but also describe part of the target object, such as the object’s surface or edge. By matching the point cloud model with the scene point cloud captured by the camera, you can achieve object recognition and localization.
What Is Pick Point?
A pick point is the position on the object that can be grasped by the robot. The pick point is in the object reference frame, and the point’s position and orientation are relative to the object. The robot needs a picking pose (the TCP of the robot when picking) provided by Mech-Vision to actually perform the picking. The picking pose is transformed from the pick point on the target object. Therefore, pick points need to be added to point cloud models, so that Mech-Vision can generate pick points for target objects through matching, and further output picking poses for the robot.
Depending on the specific picking method, the point can be located inside the point cloud, on the surface of the point cloud, or at a certain distance away from the point cloud. In practice, you can initially set the position of the pick point roughly and then adjust it based on the actual picking results.
How to Make Point Cloud Model and Pick Point?
Basic Requirements
A good point cloud model should meet at least the following three requirements:
-
The point cloud model should have a sufficient number of points, which are evenly distributed to guarantee the matching speed.
-
The point cloud model should reflect typical features of the target object to ensure accurate recognition during matching.
-
The point cloud model should not contain interfering point clouds to ensure the stability and accuracy of matching.
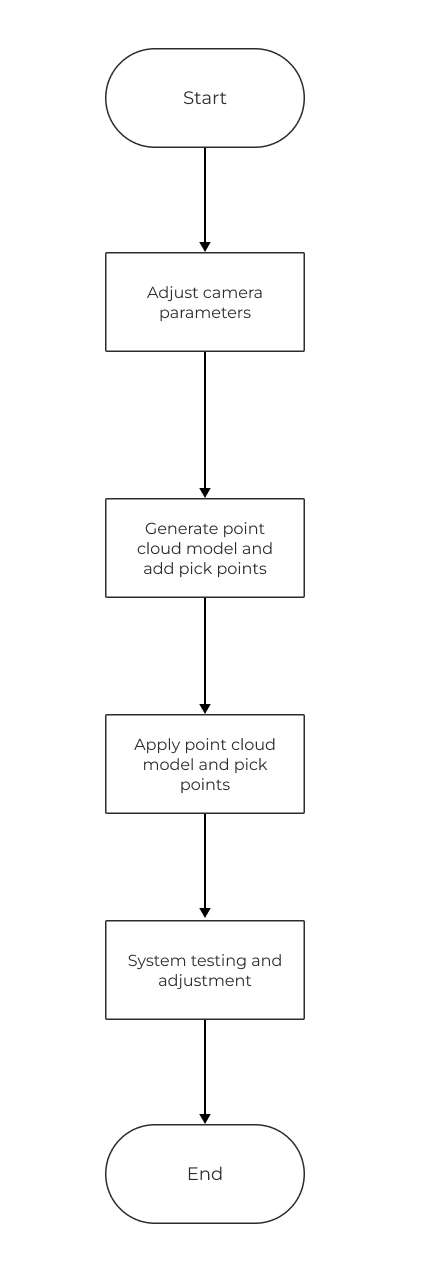
To ensure that the point cloud model meets the above requirements, you need to adjust the camera parameters to improve the quality of the captured point cloud. Additionally, remove noise and perform point cloud downsampling on the captured data to further enhance the point cloud quality. To assist users in creating and editing point cloud model and adding pick points, "Target Object Editor" is provided by Mech-Vision. You can use this tool to create point cloud models and set pick points.
When to Remake Point Cloud Model?
Remake the point cloud model in the following situations:
-
Changes in object features: When the shape, size, or surface texture of the target object changes, remake the point cloud model to accommodate the new features.
-
Changes in the environment: Changes in lighting or background conditions can affect the quality of the point cloud data. Therefore, remake the point cloud model when environmental conditions change to ensure accuracy.
-
Increased accuracy requirements: When higher accuracy is needed, remake a more precise point cloud model to meet the new accuracy standards.
-
System upgrades or hardware replacement: When upgrading software, replacing the camera or changing other hardware, remake the point cloud model to adapt to the new system configuration.
-
Increased error rate: If the matching error rate rises, it indicates that the existing model may no longer be suitable. Remake the point cloud model to improve matching accuracy.
-
New application or product line introduction: When facing new products or application scenarios, remake the point cloud model to optimize and meet the requirements of the new application or product line.
-
Solution upgrade: After the solution created in 1.8 or earlier versions is upgraded to the current version, you need to remake the point cloud model using the "Target Object Editor" tool.