Generate Bounding Box for Point Cloud
Workflow
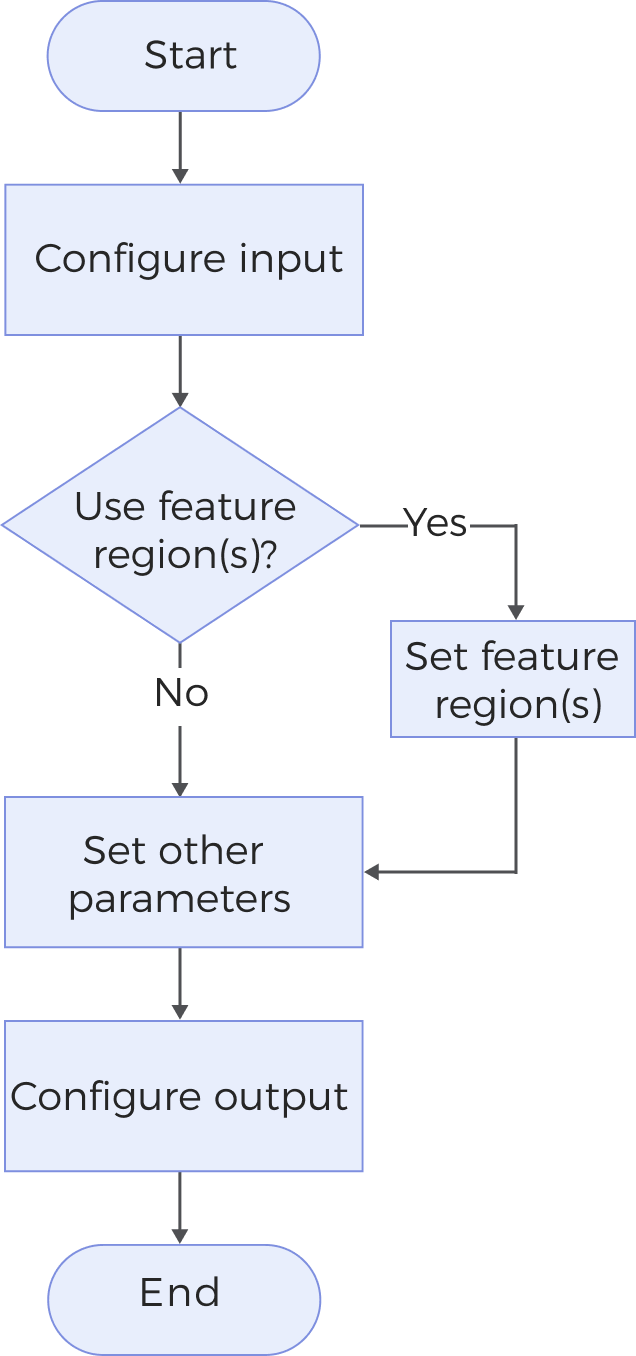
The process of configuring this Step is as follows:
-
Configure the input. Connect the ports manually in the graphical programming workspace or select the input under Input in the parameter configuration panel.
-
Determine whether to use a feature region.
-
Set other parameters.
-
Select the desired output items under Output. For an expandable output item, click ▶ and configure the Min and Max values to set the acceptable range.
Parameter Description
| Parameter | Description | ||
|---|---|---|---|
Use Feature Region |
When this option is unselected, a minimum volume bounding box will be generated for the entire point cloud. Once this option is selected, you can set one or more feature regions. The Step generates a bounding box based on the point cloud within the feature region(s). |
||
Point Cloud Downsampling |
This parameter is used to determine whether to downsample the point cloud before calculating the bounding box. When the point cloud is very dense, you can apply downsampling to reduce the number of points and improve calculation efficiency. Once this option is selected, you need to set Voxel Size: The downsampling process divides the point cloud space into cubic voxels (3D grids), replacing all points within each voxel with a single representative point. A larger voxel size speeds up processing but may cause more detail loss, resulting in a greater bounding box. A smaller voxel size preserves more details but reduces processing speed.
|
||
Euler Angle Rotation Order |
This parameter is used to specify the rotation order for generating the bounding box. It will only affect the angles output by the Step, not the size and position of the bounding box. Default value: Auto. The default option allows the system to automatically select the optimal rotation order. Value list: Auto, X→Y→Z, X→Z→Y, Y→X→Z, Y→Z→X, Z→X→Y, Z→Y→X |
Output Description
| Parameter | Description | ||
|---|---|---|---|
Point Cloud Bounding Box |
A minimum volume bounding box that tightly encloses the point cloud. |
||
Center X Center Y Center Z |
The coordinates of the geometric center of the bounding box, which represent the position of the bounding box in the 3D space. The unit is millimeters (mm). |
||
Rotation Angle about X-axis Rotation Angle about Y-axis Rotation Angle about Z-axis |
These angles are Euler angles, corresponding to the rotation angles of the bounding box around the X, Y, and Z axes in the world reference frame, respectively. They are affected by the Euler Angle Rotation Order parameter. The unit is degrees (°). |
||
Width (X) Length (Y) Height (Z) |
Correspond to the dimensions of the bounding box in its local reference frame in the X, Y, and Z directions, respectively. The unit is millimeters (mm). |
||
Bounding Box Volume |
The volume of the 3D space enclosed by the bounding box. The unit is cubic millimeters (mm3). |
||
Bounding Box Center |
The output is a feature point at the geometric center of the bounding box. |
||
Bounding Box X-axis Bounding Box Y-axis Bounding Box Z-axis |
Correspond to the X-axis, Y-axis, and Z-axis of the bounding box in its local reference frame, respectively, which pass through the geometric center of the bounding box.
|
Troubleshooting
|
CV-W7001
Error: Too few points in the point cloud to generate a bounding box.
Possible causes:
-
Too few points in the point cloud input to the Step.
-
Too few points in the feature region(s).
-
The voxel size for downsampling is too large, which results in insufficient points.
Solutions:
-
Ensure that the input point cloud contains at least four points.
-
Adjust the feature region(s) to ensure that there are at least four points in the feature region(s).
-
Adjust “Voxel Size” to ensure sufficient points after downsampling.