Fit Plane to Point Cloud
Workflow
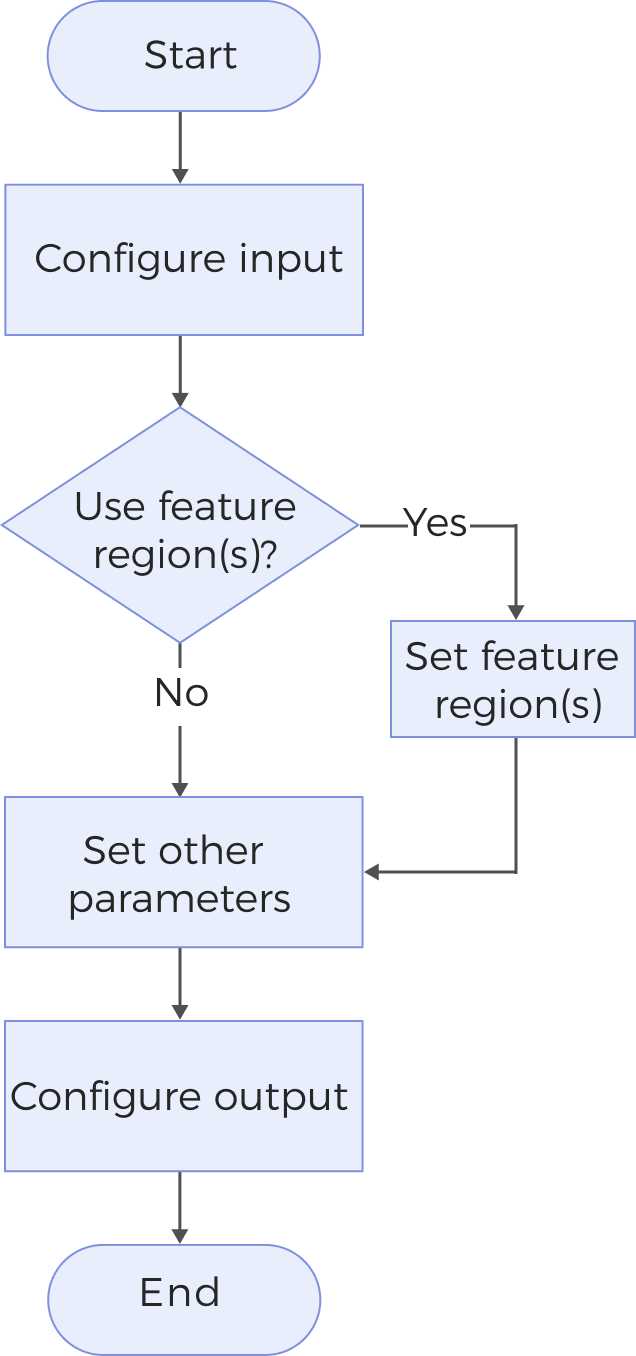
The process of configuring this Step is as follows:
-
Configure the input. Connect the ports manually in the graphical programming workspace or select the input under Input in the parameter configuration panel.
-
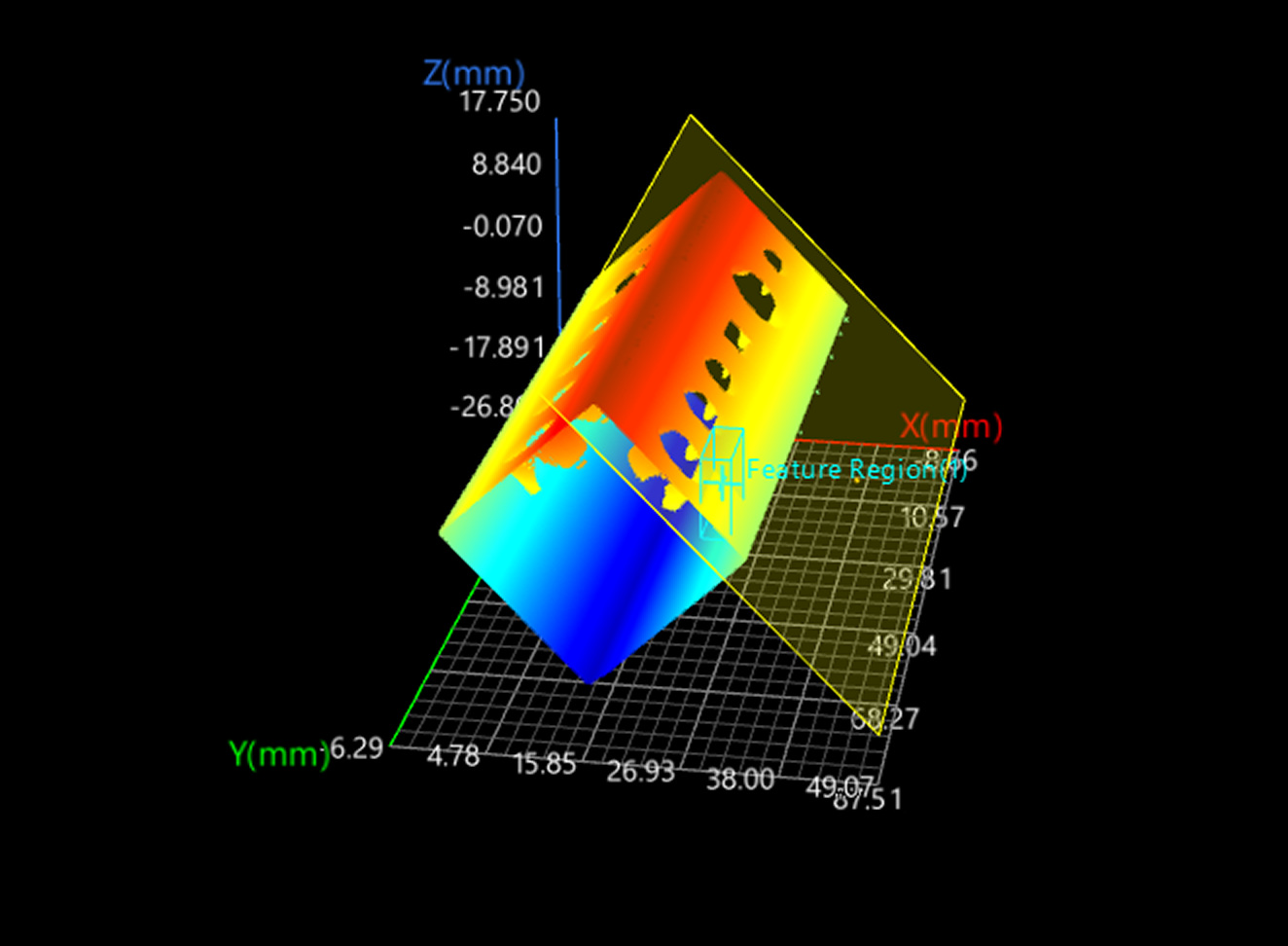
Determine whether to use a feature region.
-
Set other parameters.
-
Select the desired output items under Output. For an expandable output item, click ▶ and configure the Min and Max values to set the acceptable range.
Parameter Description
| Parameter | Description | ||
|---|---|---|---|
Use Feature Region |
When this option is unselected, all points will be used for plane fitting. Once this option is selected, you can set one or more feature regions. Only points within the feature region(s) will be used for plane fitting. |
||
Point Cloud Downsampling |
This parameter is used to determine whether to downsample the point cloud before plane fitting. When the point cloud is very dense, you can use downsampling to reduce the number of points and improve calculation efficiency. Once this option is selected, you need to set Voxel Size: The downsampling process divides the point cloud space into cubic voxels (3D grids), replacing all points within each voxel with a single representative point. A larger voxel size speeds up processing but may increase fitting error. A smaller voxel size preserves more details and improves fitting accuracy, at the cost of slower processing.
|
||
Max Iterations |
The maximum number of attempts the algorithm will make to fit an optimal plane. Iteration stops once this limit is reached. Default value: 40 |
||
Plane Type |
Select the type of plane to fit.
|
||
Plane Normal Direction |
This parameter is used to constrain the direction of the plane’s normal to determine the plane orientation. The algorithm will only look for the plane whose normal points roughly in the specified direction. Value list: All directions, Positive Z, Negative Z, Positive X, Negative X, Positive Y, Negative Y, Custom If Custom is selected, set the Tilt Angle and Direction Angle to determine a unique direction vector as the normal of the fitted plane.
|
Output Description
The output of this Step is a fitted plane that can be used as input to other Steps.
Troubleshooting
|
CV-W7101
Error: The set “Plane Normal Direction” is invalid.
Solution: Select a valid plane normal direction from the drop-down list.
CV-W7102
Error: Too few points in the point cloud to fit a plane.
Possible causes:
-
Too few points in the point cloud input to the Step.
-
Too few points in the feature region(s).
-
The voxel size for downsampling is too large, which results in insufficient points.
Solutions:
-
Ensure that there are enough points in the point cloud input to the Step for plane fitting.
-
Adjust the feature region (s) to ensure that enough points are within the feature region(s) to fit a plane.
-
Adjust “Voxel Size” to ensure sufficient points after downsampling.