데이터 획득 예시
이 부분에서는 일부 알고리즘 모듈에 대한 데이터 획득 예시를 제공하며, 실제 솔루션에서 고품질 데이터 세트를 획득하는 방법을 소개합니다.
인스턴스 세그먼테이션
-
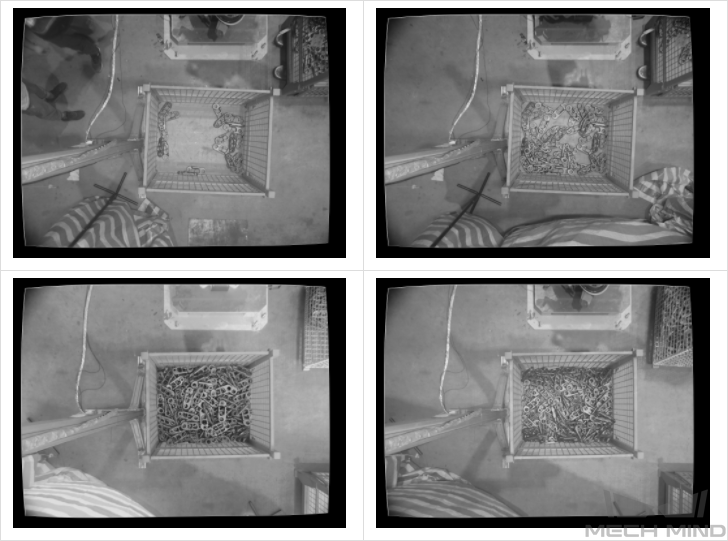
금속 부품 프로젝트에서는 단일 종류 물체이므로 50장을 수집합니다. 물체 방향은 평배치와 측면 세움을 모두 고려해야 하며, 물체 위치는 빈 중앙/사방/모서리 및 다양한 높이를 포함해야 합니다. 물체 간 관계는 적층뿐 아니라 소량 병렬 배치도 고려해야 합니다. 실제 수집 이미지는 다음과 같습니다:

-
생활용품 프로젝트에서는 7개 종류의 혼합 물체를 분류해야 합니다. 수집 시 "단일 종류 물체의 다중 자세 배치"와 "다중 종류 물체의 혼합 배치"를 모두 고려해 특성을 충분히 커버해야 합니다. 단일 종류 수집 수량 = 5 × 종류 수, 혼합 배치 수집 수량 = 20 × 종류 수입니다. 물체 방향은 평배치/측면 세움/기울임을 모두 고려하고, 물체 위치는 빈 중앙/사방/모서리를 포함해야 하며, 물체 간 관계는 적층, 병렬, 밀착 배치를 모두 고려해야 합니다. 실제 수집 이미지는 다음과 같습니다:
-
단일 종류 물체

-
혼합 물체

-
-
트랙슈 프로젝트에서는 물체 모델이 여러 종류이므로 수집 수량은(30 × 모델 수)입니다. 물체 방향은 정면 상향만 고려하면 되고, 물체 위치는 고/중/저 층의 다양한 높이 시야를 포함해야 하며, 물체 간 관계는 규칙 적재 상태에서 밀착 배치를 중점 고려해야 합니다. 실제 수집 이미지는 다음과 같습니다:

-
금속 부품 프로젝트에서는 단층 평배치이므로 50장을 수집합니다. 물체 방향은 정면 상향만 고려하면 되고, 물체 위치는 빈 중앙/사방/모서리를 포함해야 하며, 물체 간 관계는 밀착 배치를 고려해야 합니다. 실제 수집 이미지는 다음과 같습니다:
-
금속 부품 프로젝트에서는 다층 정렬 적재이므로 30장을 수집합니다. 물체 방향은 정면 상향만 고려하면 되고, 물체 위치는 빈 중앙/사방/모서리 및 고/중/저 층 높이를 포함해야 하며, 물체 간 관계는 밀착 배치를 고려해야 합니다. 실제 수집 이미지는 다음과 같습니다:
이미지 분류
-
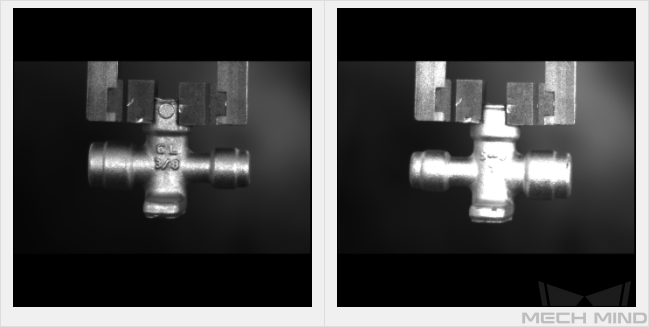
밸브 튜브 프로젝트: 단일 종류 밸브 튜브의 앞면과 뒷면을 구분해야 하며, 위치 오프셋이 작습니다. 앞면과 뒷면 각각 15장의 이미지를 캡처합니다.
-
엔진 밸브 조립 프로젝트: 단일 종류의 물체가 슬롯에 올바르게 배치되었는지 확인해야 합니다. 슬롯 외부에서는 다양한 위치와 방향을 고려해야 하므로 20장의 이미지를 캡처하고, 슬롯 내부에서는 위치 편차만 고려하면 되므로 10장의 이미지를 캡처합니다.

-
판금 프로젝트: 두 가지 종류의 물체 크기를 구분해야 하며, 물체는 위치와 방향이 다를 수 있습니다. 앞면과 뒷면 각각 20개의 이미지를 캡처합니다.


물체 검출
-
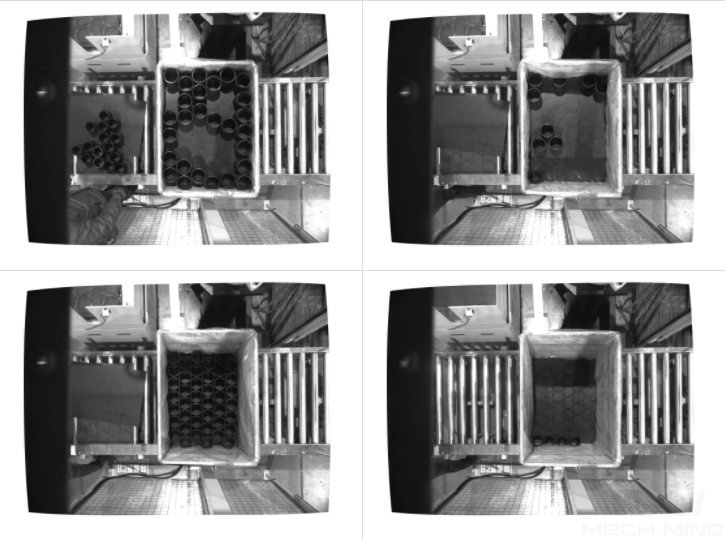
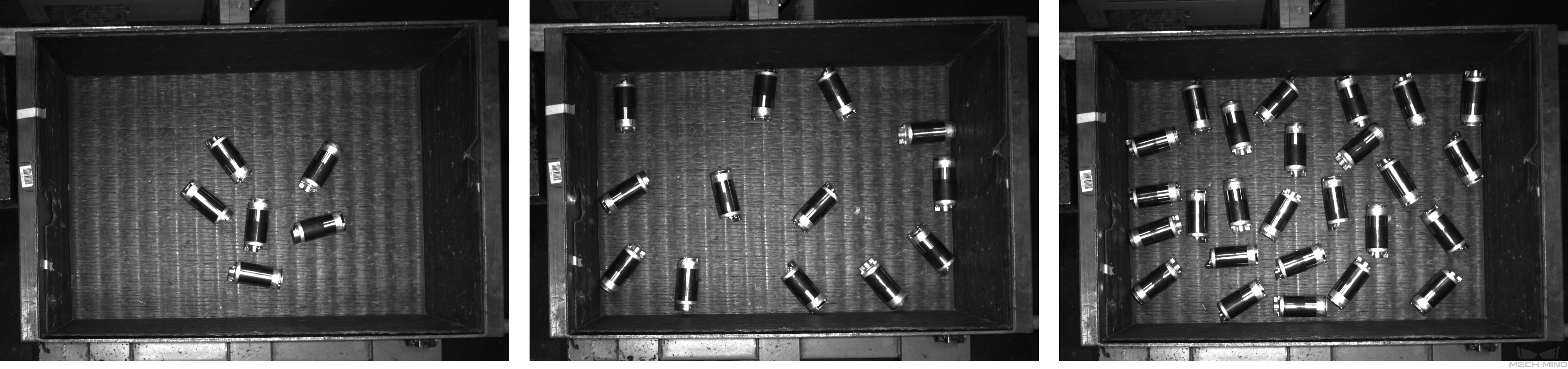
물체 검출 프로젝트의 경우, 무작위로 흩어져 있는 로터를 검사해야 합니다. 이 프로젝트의 목표는 모든 로터 위치를 정확하게 검사하는 것입니다. 총 30장의 이미지를 캡처합니다.
-
물체 위치: 실제 생산 과정에서 로터는 빈의 어느 위치에나 있을 수 있으며, 수량은 매번 피킹할 때마다 감소합니다.
-
물체 간 위치 관계: 로터는 흩어져 있을 수도 있고, 깔끔하게 배치되어 있을 수도 있으며, 겹쳐져 있을 수도 있습니다.
-
-
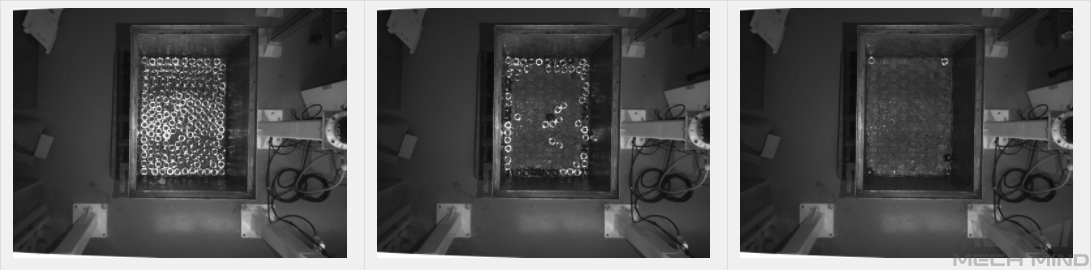
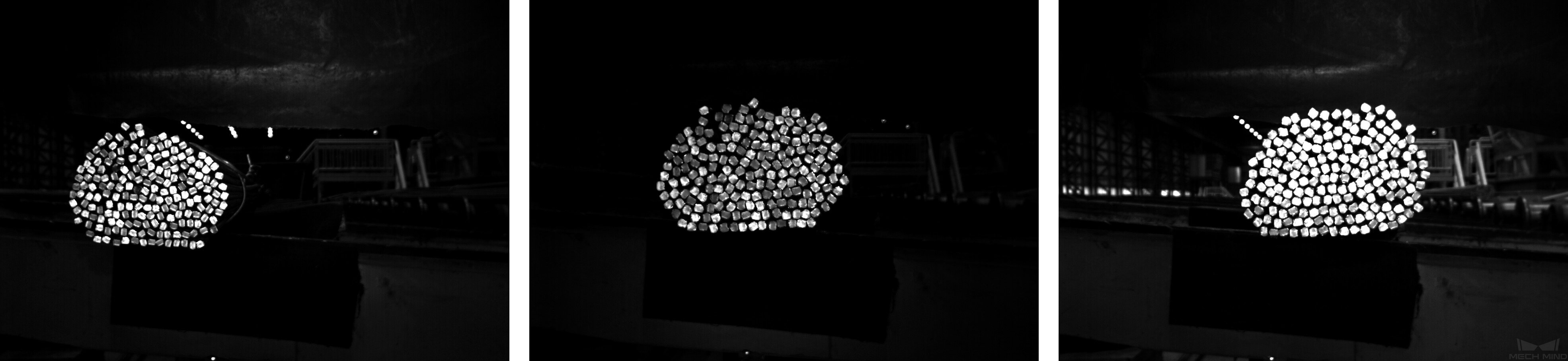
철근 개수 측정 프로젝트의 경우, 철근 묶음의 수량을 정확하게 계산해야 합니다. 총 20장의 이미지를 캡처합니다.
-
철근의 특징은 비교적 단순하므로 *물체 위치 변화*만 고려하면 됩니다. 실제 생산 과정에서 철근이 카메라 시야 내 어느 위치에 있을 수 있는지를 감안하여, 가능한 모든 위치를 촬영합니다.
-