RPS座標系設定
本節では、RPS座標系設定の使用方法について説明します。
以下の手順に従って、RPS座標系設定機能を使用してください。
-
以下のいずれかの方法でRPS座標系設定ウィンドウを開き、使用する特徴を追加します。
-
ソフトウェアの設定画面上部の機能エリアで、を選択します。表示されるウィンドウで、使用中の特徴の右側にある「+」ボタンをクリックし、使用する特徴を追加します。
-
左側のリソースツリーエリアで、Ctrlキーを押しながら複数の特徴をクリックして選択し、右クリックしてを選択します。
ユーザーはワークの図面を確認し、選択するRPS特徴を特定できます。 -
-
特徴を追加した後、使用中の特徴の下にある特徴テーブルで、必要に応じて測定項目にチェックを入れます。
ユーザーはワークの図面を確認し、3-2-1ルールに基づいて必要な測定項目を決定できます。 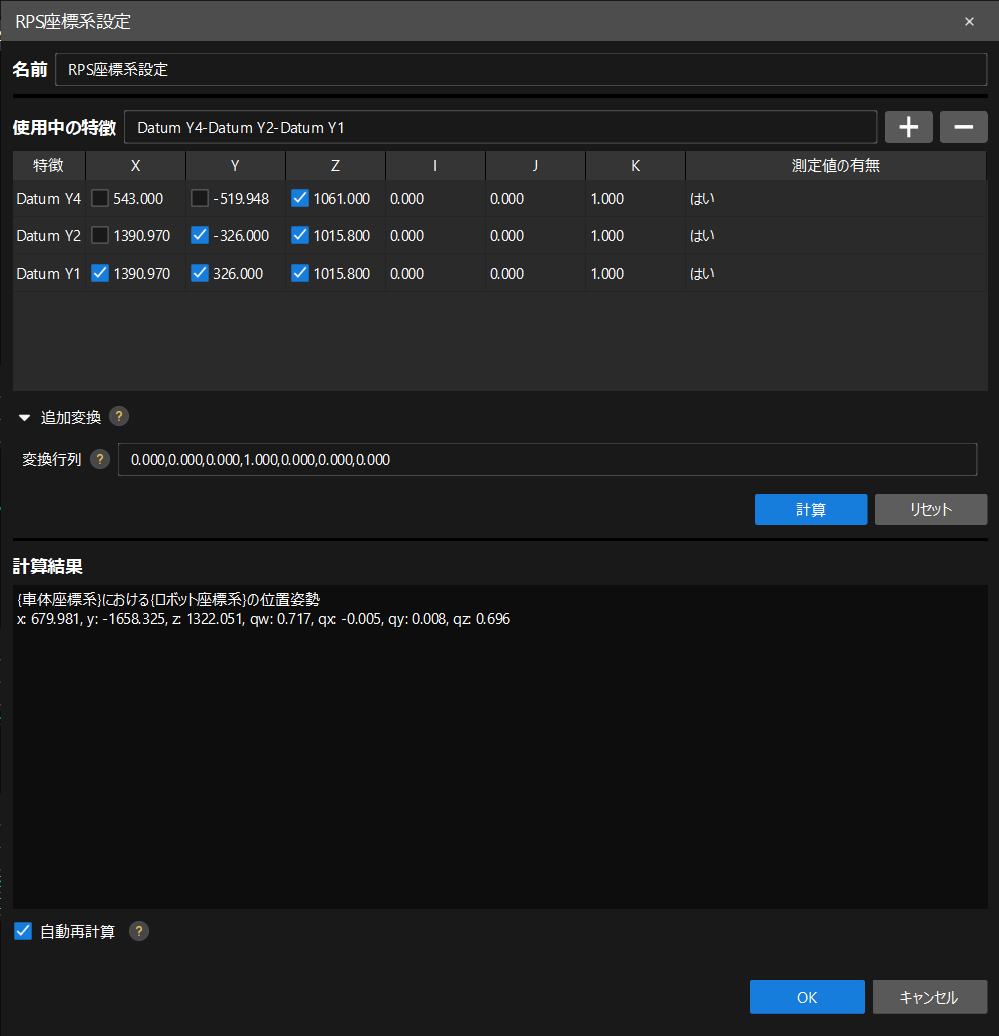
3-2-1ルール
ワークの6つの自由度を拘束するために使用される。具体的には、ワークは3次元空間においてx、y、zの3つの軸を持ち、各軸には2つの方向(移動と回転)があるため、合計で6つの自由度があります。3-2-1ルールは、以下の基準点を用いてワークを拘束します。
-
3つの基準点で構成される平面は、ワークのz軸方向の移動、およびx軸とy軸まわりの回転自由度を制限します。
-
2つの基準点で構成される直線は、ワークのy軸方向的の移動、およびz軸まわりの回転自由度を制限します。
-
1つの基準点により、ワークのx軸方向の移動自由度を制限します。
-
-
自動再計算にチェックを入れ、OKをクリックします。
現時点では測定データがないため、計算をクリックする必要はありません。自動再計算にチェックを入れると、ソフトウェアは選択された特徴のすべての測定データを取得した後、自動的に再計算を行います。 計算結果が合格かどうかを判断する方法
ある特徴の測定値を取得した後、注釈カードでその特徴の偏差値を確認します。偏差値が赤く表示されていない場合は、座標系設定が正常に行われたことを示します。