静的繰り返し精度テスト
本節では、静的繰り返し精度をテストする方法について説明します。
|
|
ユーザーはまず半動的繰り返し精度テストを行い、結果が良くなかった特徴に対して静的繰り返し精度テストを実施できます。この場合、静的繰り返し精度テストは一部の特徴のみに対して行えばよいため、より簡単かつ迅速です。 |
|
ロボット側
|
前提条件
静的繰り返し精度テストを開始する前に、以下の条件が満たされていることを確認してください。
-
現在のワークが Mech-Metrics で Mech-MSR ソリューションに関連付けられていること。
-
現在の特徴が Mech-Metrics で Mech-MSR プロジェクトにバインドされていること。
-
Mech-MSR ソリューションとプロジェクトが Mech-MSR で開かれていること。
-
ロボットが標準インターフェース通信を介して Mech-MSR との接続を確立しており、ハンド・アイ・キャリブレーションが完了し、すべての測定位置がロボットプログラムにティーチングされていること。ロボット側でロボットを最初の測定予定位置に移動していること。
-
測定を開始する前に、ロボットとカメラの予熱が30分間行われていること。
-
測定を開始する前に、外部の照明環境と温度が安定していること。
静的繰り返し精度に影響を与える要因
静的精度に影響を与える要因:
-
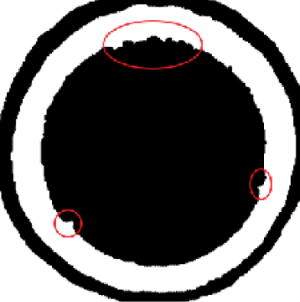
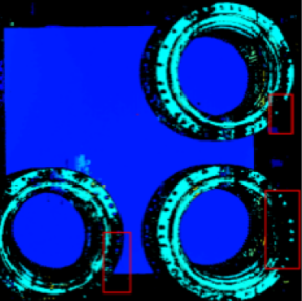
ワークエッジのバリ
-
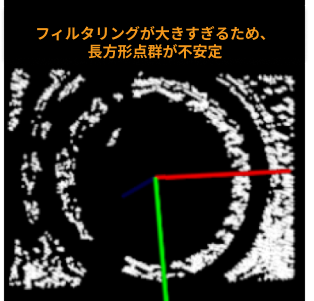
フィルタパラメータの設定が不適切
-
露光パラメータの設定が不適切
-
ROIが不適切

確認方法:
-
適切なフィルタパラメータを設定します。
-
適切な露光パラメータを設定します。
-
適切なROIを設定します。
静的繰り返し精度テスト
以下の手順に従って、静的繰り返し精度をテストテストしてください。
-
Mech-Metrics ソフトウェア設定画面の分析と補正タブの下にある静的繰り返し精度をクリックします。
-
静的繰り返し精度テスト画面で、テスト対象となる特徴を選択し、ロボットが現在その特徴位置に移動していることを確認した上で、繰り返し回数を 20 に設定し、テストを開始をクリックします。
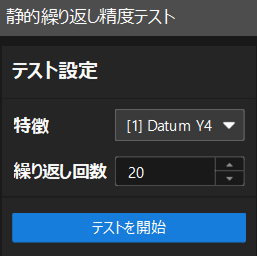
推奨測定回数は20~50回です。
-
テスト完了後、本画面の右側でその特徴のテスト結果を確認します。
エラーが発生した場合は、ソフトウェアに表示されるメッセージに従って原因を特定してください。
3Dタブ
-
テスト結果画面の3Dタブには、特徴点の3D座標が測定回数に応じて変動する傾向が表示されます。
-
特徴点とは、その特徴が存在する位置の点を指します。例えば、円柱特徴の特徴点はその円の中心です。
-
3D座標とは、ある点の三次元座標系における座標を指します。
-
3Dタブにおける3Dとは、測定で得られた特徴点位置と、1回目の测量で得られた特徴点位置との間の3D距離を表します。
-
-
ユーザーは3Dタブ内で1つまたは複数の特徴にチェックを入れ、距離が測定回数に応じて変動する傾向を確認および比較できます。
-
-
以上の手順を繰り返し、残りの特徴に対して静的繰り返し精度テストを行い、テスト結果を確認します。
本ソフトウェアでは、デフォルトの静的合格しきい値は繰り返し精度の範囲(最大-最小)が ≤0.05mm です。プロジェクトによって異なる合格しきい値の要求がある場合、ユーザーはテクニカルサポートに連絡して変更することができます。
-
精度
測定結果と真値との近さ、または誤差の大きさを指します。
-
範囲
統計学において、データセット内の最大値と最小値の差を測るための指標です。データのばらつきの度合いを示すために使用されます。
-