ワークの新規作成と属性設定
本節では、Mech-Metrics でワークを新規作成し、ワーク属性を設定する方法(ワークと Mech-MSR プロジェクトの関連付けを含む)について説明します。
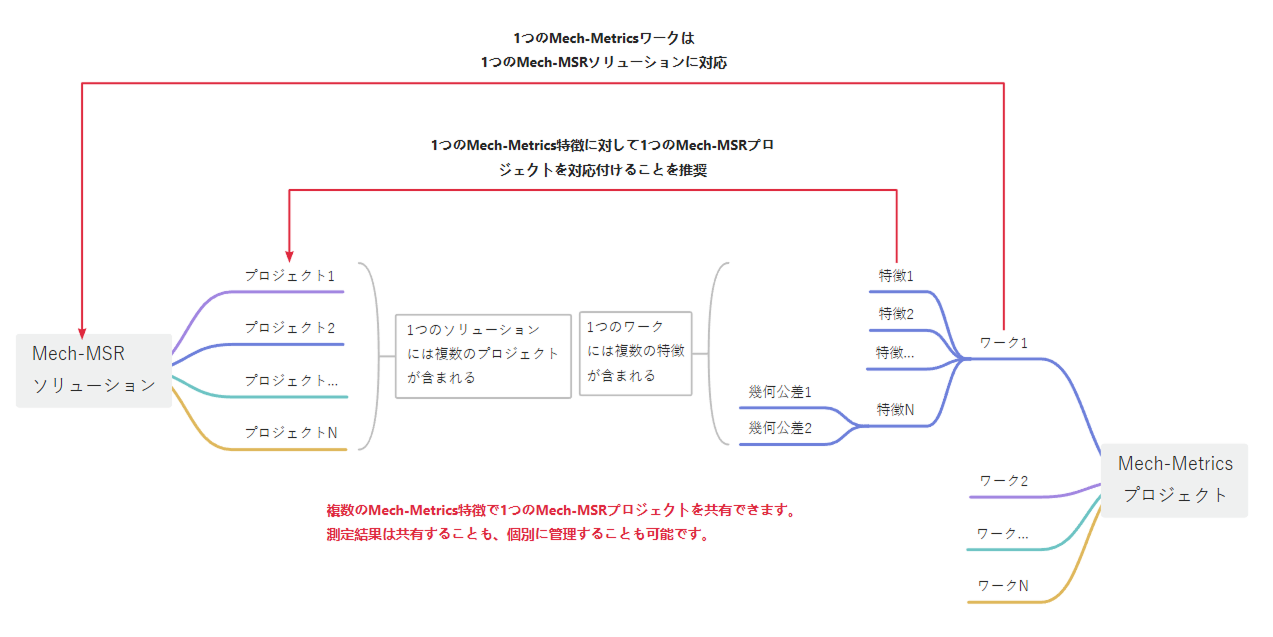
Mech-Metrics ワークと Mech-MSR プロジェクトの関係
インライン測定システムにおいて、Mech-MSR のプロジェクトは完全な測定タスクおよび測定プロセスの設定(測定ソリューション、測定項目、座標系、データ収集など)を定義します。Mech-Metrics のワークはこれらの測定プロセスと基準のもとで実際に測定および管理される対象(サブ車フレームやステアリングアームなど)を指します。
-
1つの Mech-MSRプ ロジェクトは複数のワークインスタンス(異なるSN/バッチ)に対応することができ、Mech-Metrics はこれらのワークの属性、測定データ、結果の管理と表示を担当します。
-
ユーザーが Mech-Metrics を使用する際は、ワークを対応する Mech-MSR ソリューションに関連付ける必要があります。
ワークの新規作成
ソフトウェア設定画面の左上に、Part01タブが表示されています。これはソフトウェアが現在のプロジェクトに対して自動的に新規作成したワークです。新規作成された最初のワークのデフォルト名はPart01であり、ユーザーは実際の状況に応じてこのワーク名を変更できます。このワーク名は、ロボットプログラム内の801コマンド——測定タスクを開始で使用されます。
| ワーク名を変更する場合は、ワークタブまたはリソースツリー内のワーク名を右クリックし、名前の変更を選択して変更してください。 |
|
ワーク番号とは、異なるワーク種類を識別するための識別コードです。各ワーク種類には固有のワーク番号が対応しており、システム内での分類、管理、および検索を容易にします。ユーザーは実際の運用要件に応じて、各ワーク種類に対して固有のワーク番号を設定できます。ロボットプログラムの測定指令(801~805)では、このワーク番号を用いてワーク種類を識別します。
|
ワークの属性設定
ワークを新規作成した後、ワークを Mech-MSR の測定プロセスと関連付けるために、ワークの関連属性を設定する必要があります。
ソフトウェア設定画面の左側のリソースツリーで、ワークエリアのワーク名をクリックすると、右側のパラメータパネルにそのワークの属性設定エリアが表示されます。ワークカテゴリと Mech-MSR ソリューションが含まれます。
ワークカテゴリを選択する
ワークカテゴリエリアで、ワークのカテゴリを選択します。
-
ワーク:測定対象を指します。ほとんどの場合はワークを選択します。
-
温度ドリフトロッド:温度ドリフト補正データの取得に使用します。
温度ドリフトロッドを選択した場合は、温度ドリフト補正を有効にするために以下の設定を完了してください。
-
Mech-Metrics において温度ドリフトロッドの特徴を作成し、各特徴に対応する Mech-MSR プロジェクトおよびパラメータレシピを割り当てます。
-
Mech-MSR の温度ドリフト補正ツールを使用してロボットとプロジェクトを関連付け、各プロジェクトに対して温度ドリフト補正を有効にするかどうかを選択します。
-
Mech-MSR ソリューションを関連付ける
Mech-MSR ソリューションエリアで、ワークに対応する Mech-MSR ソリューションパスを関連付けます。
| 各 Mech-Metrics ワークに関連付けできるのは、1つの Mech-MSR ソリューションのみです。 |
以下の方法でソリューションを関連付けることができます。
-
パスの手動選択:ソリューションパスの右側にあるフォルダアイコンをクリックし、Mech-MSR ソリューションパスを参照して選択します。
-
パスの自動取得:ワークに対応する Mech-MSR ソリューションが Mech-MSR で開かれていることを確認し、Mech-MSR から現在のソリューションパスを取得をクリックすると、ソフトウェアが現在開かれているソリューションパスを自動的に取得して入力します。
さらに、以下の設定を完了する必要があります。
-
CAD モデルのインポート:後の測定点の定義や結果表示を容易にするため、ワークに CAD ファイルを参考オブジェクトとしてインポートします。詳細については、ワークへの CAD 参照オブジェクトのインポートをご参照ください。
-
ワーク番号の設定:ロボット通信プロセスにおいて異なるワークを識別できるように、ワークカテゴリごとに一意のワーク番号を設定します。詳細については、ワーク番号の設定をご参照ください。