データの処理
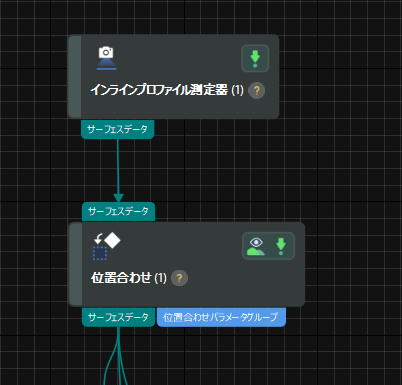
データの位置合わせ
ワークを複数回スキャンして結像した時、画像データにワーク位置のばらつきが発生します。これによる影響を低減するため、画像にある共通の特徴を抽出して位置合わせします。こうすると、後続の測定の一貫性を確保できます。
位置合わせステップの使用手順は次の通りです。
-
特徴領域を選択:このステップのパラメータパネルで特徴領域を使用をチェックして特徴選択・マッチングの対象領域を指定します。
このパラメータを選択すると、このステップは指定領域のデータによって生成されたモデルを使用してマッチングを行います。モデルを作成する時、特徴領域のデータから特徴を使用しなければなりません。 -
マッチングモデルを作成:モデルを編集ボタンをクリックして「2D マッチングモデルエディタ」ウィンドウを開きます。画像から代表的かつ共通の特徴を選択してモデルを作成します。
-
ステップのパラメータを設定:モデルを選択してから、そのステップのパラメータパネルでその他のパラメータを初期値のままにします。出力パネルのサーフェスデータをチェックします。
-
位置合わせ済みのデータを出力:ステップを実行すると、位置合わせ済みのデータが出力されます。
- デバック経験
-
-
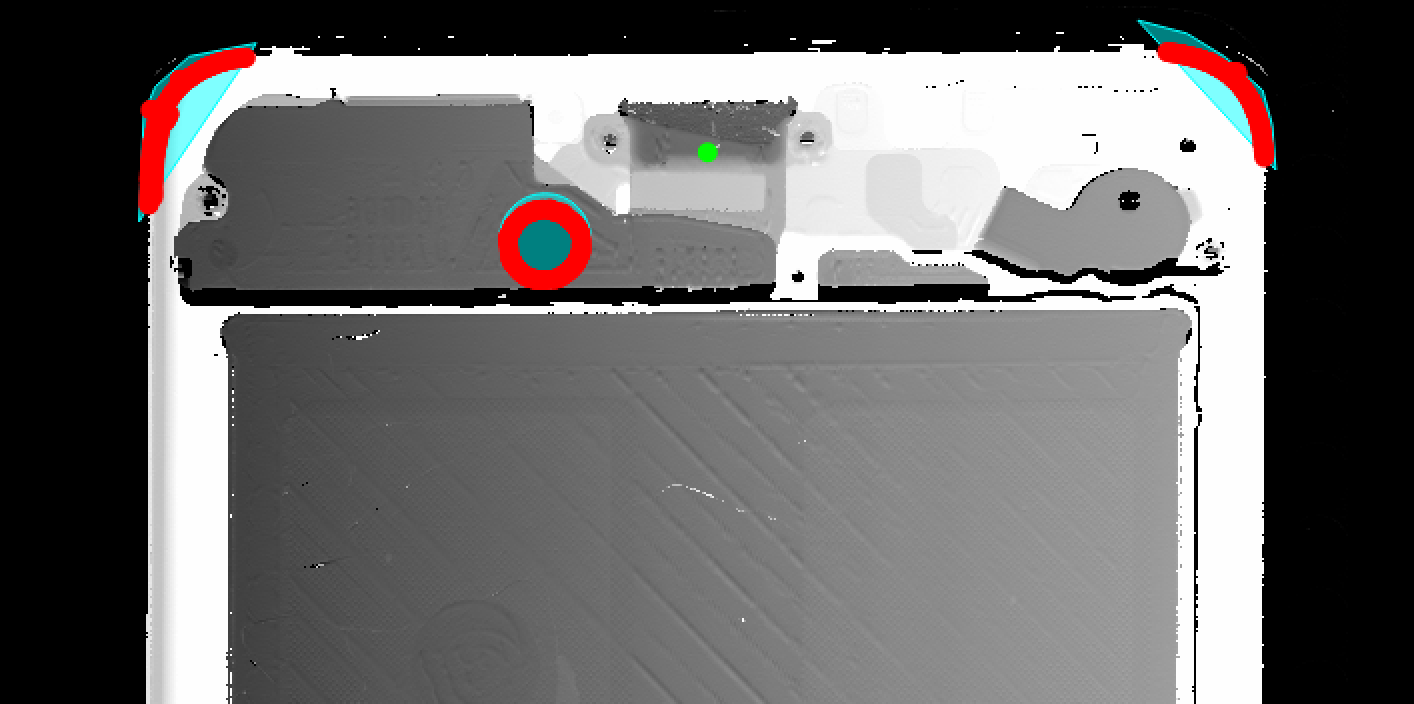
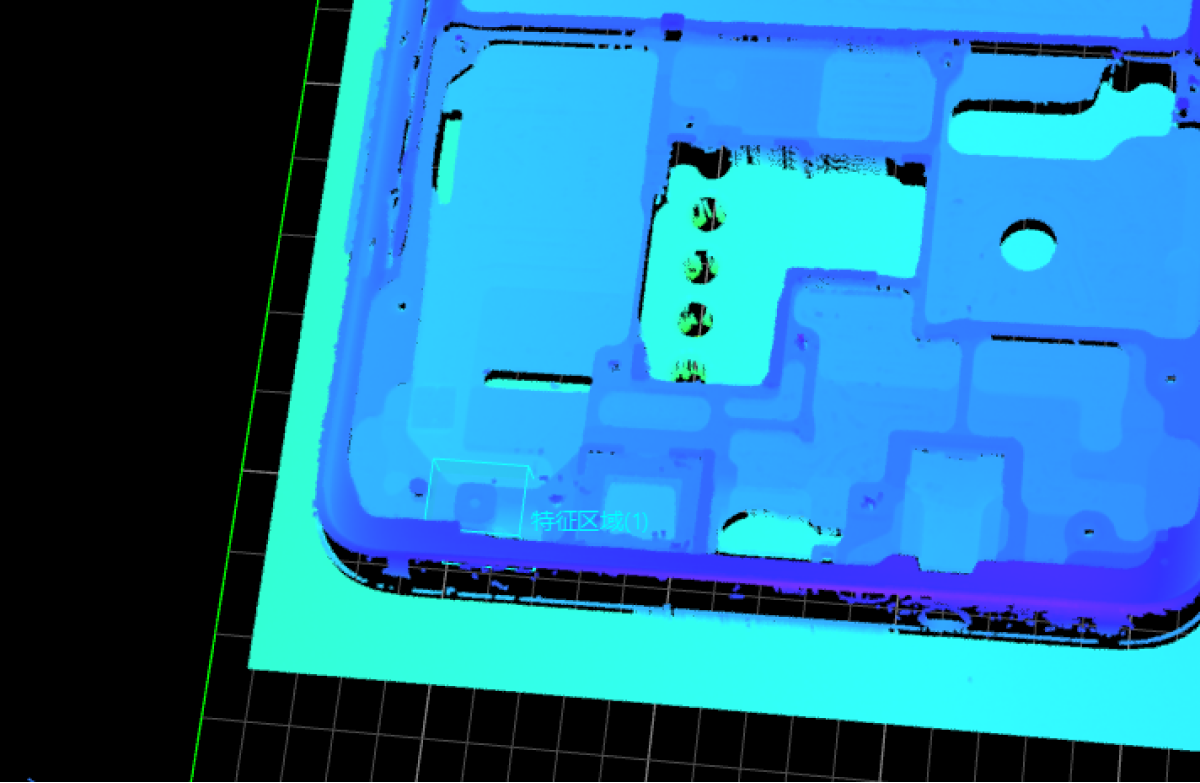
2D マッチングモデルは、画像位置合わせに非常に重要です。モデルを作成する時、点群の品質が安定的、特徴の類似性が低く、画像の X/Y 方向を制限可能なエッジを特徴として選択してください。下図に示すように、ミドルフレームの 2つの円弧状のエッジと 1つの円形のエッジを特徴 (赤) として選択すると、画像を位置合わせできます。
-
タクト向上のため、2D モデルエディタウィンドウの右の「特徴パラメータ」を設定し、角度の範囲とスケーリングの範囲を適切に絞り込みます。例えば、ワークの供給角度の偏差が 5°以内にある場合、「角度範囲」を -5°から 5°に設定します。これでマッチングの速度が向上します。より詳細なパラメータ説明については、特徴パラメータ説明をお読みください。
-
特徴の選択が難しい時、画像の右の深度範囲設定スライダをドラッグしてエッジの特徴をより鮮明に表現してくださ。
-
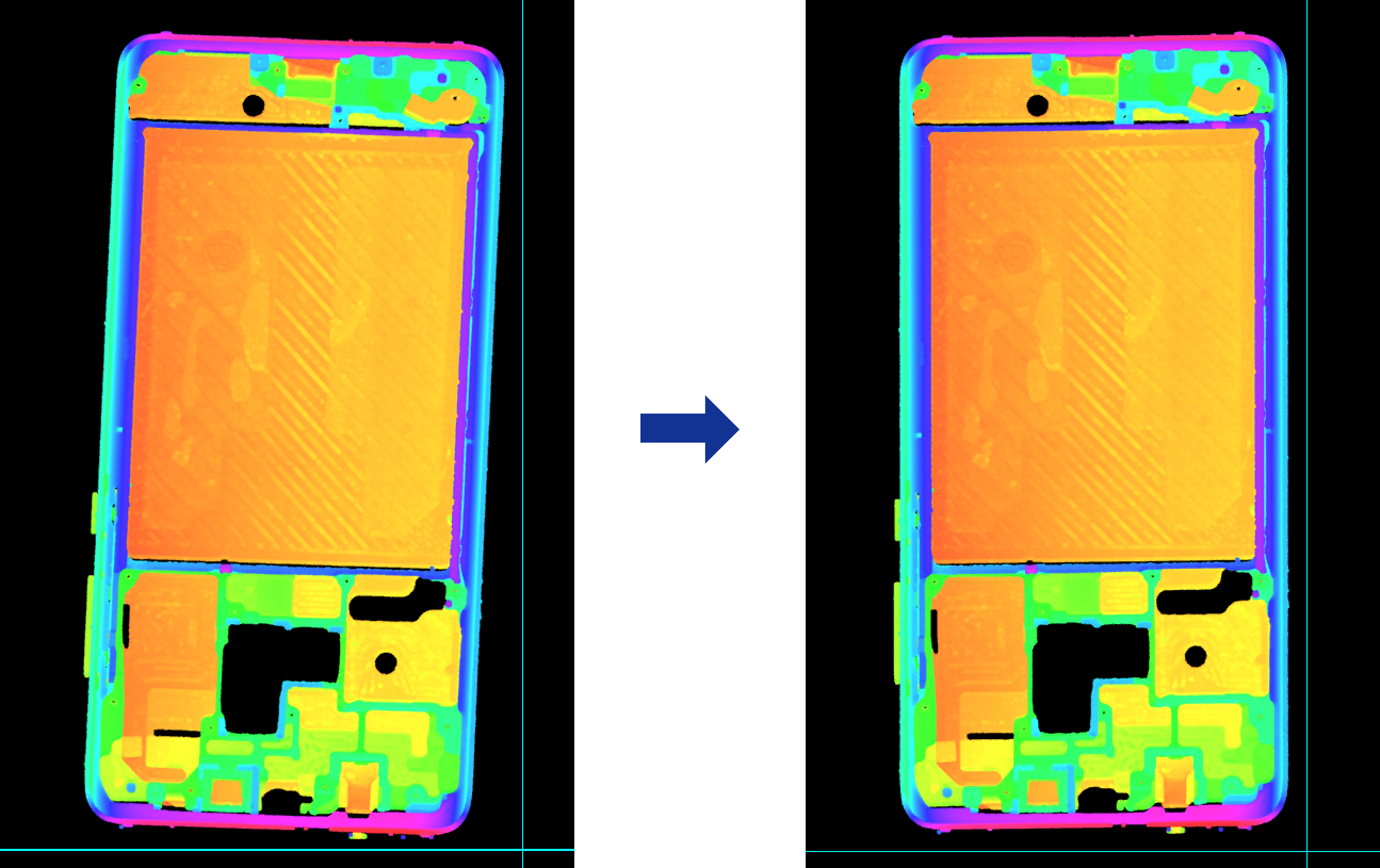
これで、データの位置合わせが完了し、バッテリーケースの平面度測定に入りましょう。
データの前処理
| データの前処理は、位置決め穴の高さを測定する時にのみ必要です。 |
サーフェスデータに使えないデータやノイズが残ります。測定する前に、フィルタリング・ノイズ除去を実行してデータの品質を向上させます。
前処理の手順:フィルタリング ➡ 位置決め
フィルター
サーフェス点のフィルタリング(法線ベクトルによる)ステップを実行して位置合わせ済みのデータから位置決め穴のデータを抽出してノイズを除去します。
-
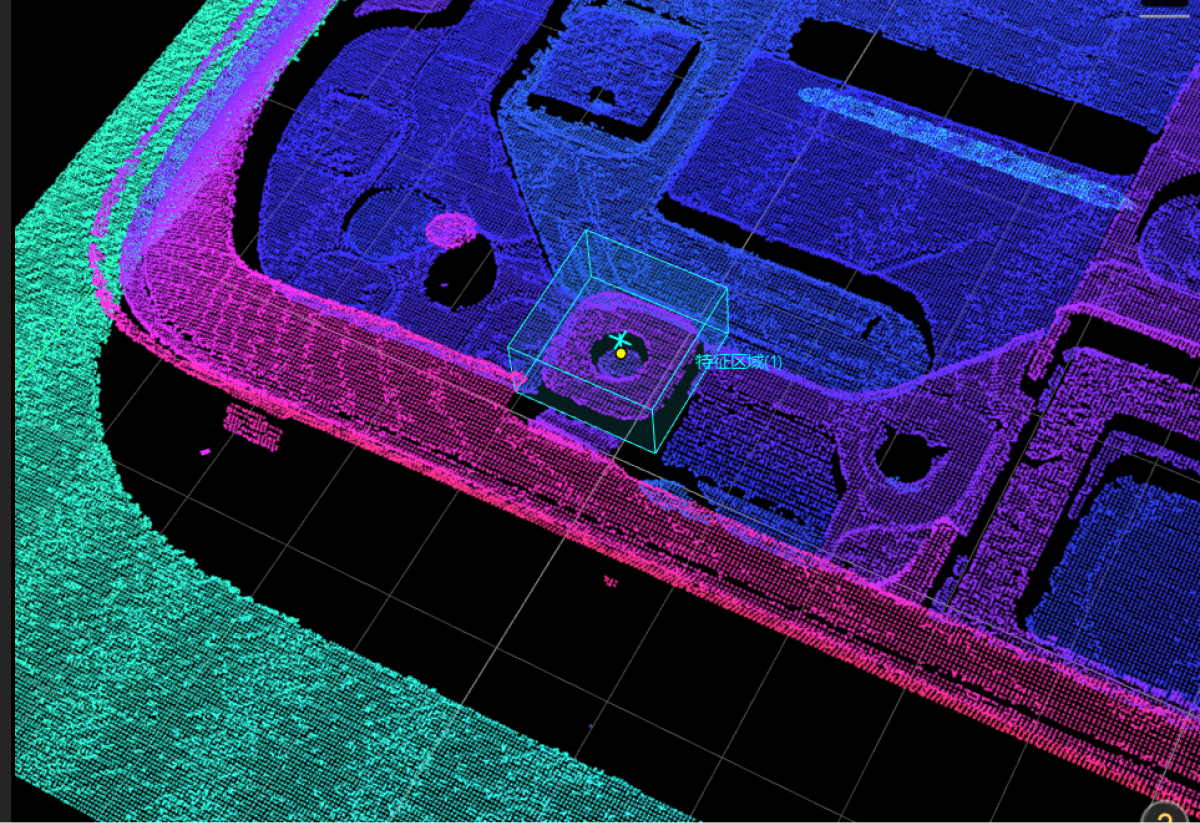
特徴領域を使用して位置決め穴のデータを指定します。
-
このステップのパラメータを調整してノイズ除去を行います。
このステップを実行した後、処理後のサーフェスデータを出力することになります。
- デバック経験
-
-
サーフェス点のフィルタリング(法線ベクトルによる)ステップは効果的にノイズを除去できます。とりわけ平坦なサーフェスデータを取得することを簡単にします。傾いたノイズ、またはランダムに分散しているノイズに対しても効果的です。

-
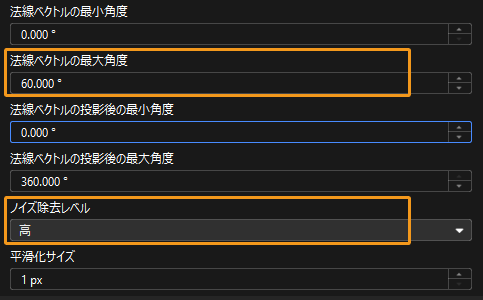
法線ベクトルの最大角度パラメータを調整して(60°程度を推奨)傾いたノイズを除去し、ノイズ除去レベルを調整してランダムに分散しているノイズを除去します。この 2つのパラメータを合わせて使用することを推奨します。より詳細なパラメータ説明については、角度フィルタリング関連パラメータをお読みください。
-
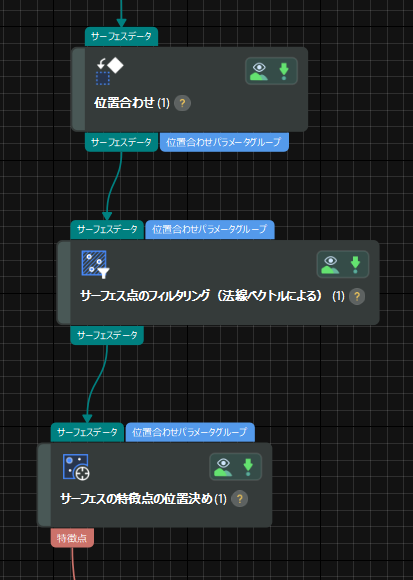
位置決め
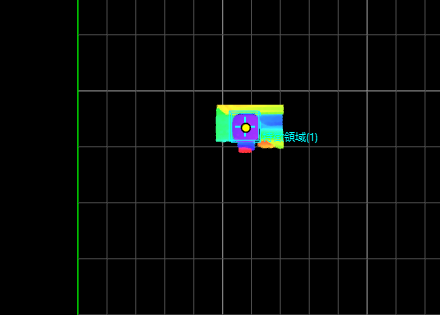
サーフェスの特徴点の位置決めステップを実行してフィルタリング済みデータから位置決め穴の上面データを取得し、かつ上面の中心点を指定して後続の高さ測定に使用します。
-
このステップのパラメータパネルで、特徴領域を使用をチェックし、位置決め穴の上面データを指定します。
-
「特徴点タイプ」を平均値に設定し、位置決め穴の上面中心点を定義します。
これで、データの前処理が完了します。
続いては、平面度の位置決め穴の高さの測定を開始しましょう。