视觉移动¶
功能描述¶
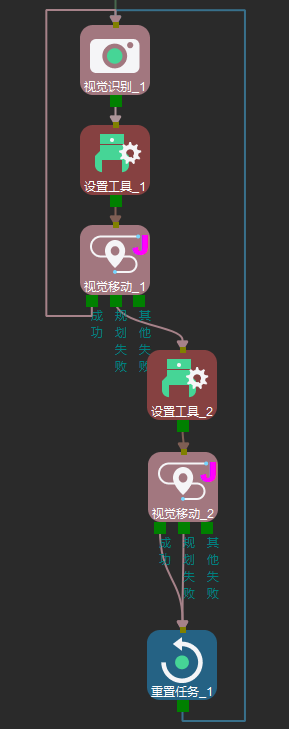
依据从视觉服务中获得的视觉位姿移动。
出口 |
说明 |
成功 |
路径规划成功 |
规划失败 |
路径规划失败 |
其他失败 |
尚未规划时,视觉移动无可规划数据。包括但不限于: Mech-Vision 未输出位姿; Mech-Vision 输出位姿,但无满足条件的结果。 |
使用场景¶
一般用于机器人抓取物体。
参数说明¶
本章中,
表示未勾选,
表示勾选。
移动任务基本参数
详细说明请查看 移动任务基本参数 。
关键属性
- 一次走完所有目标
- 复用视觉结果
- 共享视觉结果
工作模式
非参数设置
参数 |
说明 |
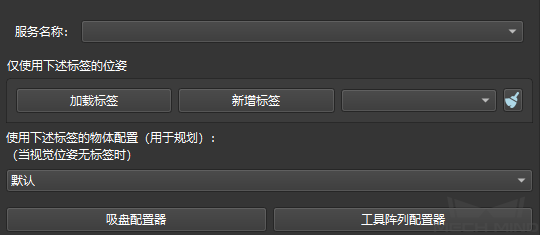
服务名称 |
一般与 视觉识别 选择同一个 Mech-Vision 工程。 |
仅使用下述标签的位姿 |
视觉服务提供的视觉结果中可能包含不同标签,选择某标签后, 视觉移动 将仅使用选中标签的视觉结果。 |
选择标签:单击 加载标签 或 新增标签 选择。标签选择成功后,右侧下拉栏中显示对应的标签名称。 |
|
删除标签:单击 |
|
使用下述标签的物体配置(用于规划) |
不同工件使用不同的被操作物体配置,对应不同的标签。 |
视觉结果无标签时,选择 默认 。 |
|
视觉结果有对应标签时,选择对应的标签。 |
|
吸盘配置器 |
详细内容请查看 吸盘配置器 。 |
工具阵列配置器 |
详细内容请查看 工具阵列配置器 。 |