快速了解 Mech-Viz¶
Mech-Viz 是梅卡曼德机器人自主研发的新一代的机器人智能编程软件。具备可视化、无代码的编程界面,可一键仿真,内置路径规划、碰撞检测等智能算法,已适配国内外众多主流品牌机器人。 Mech-Viz 软件配合梅卡曼德其他系列软件共同组成梅卡曼德机器人视觉系统,实现机器人基于视觉的智能化生产。
主界面概览¶
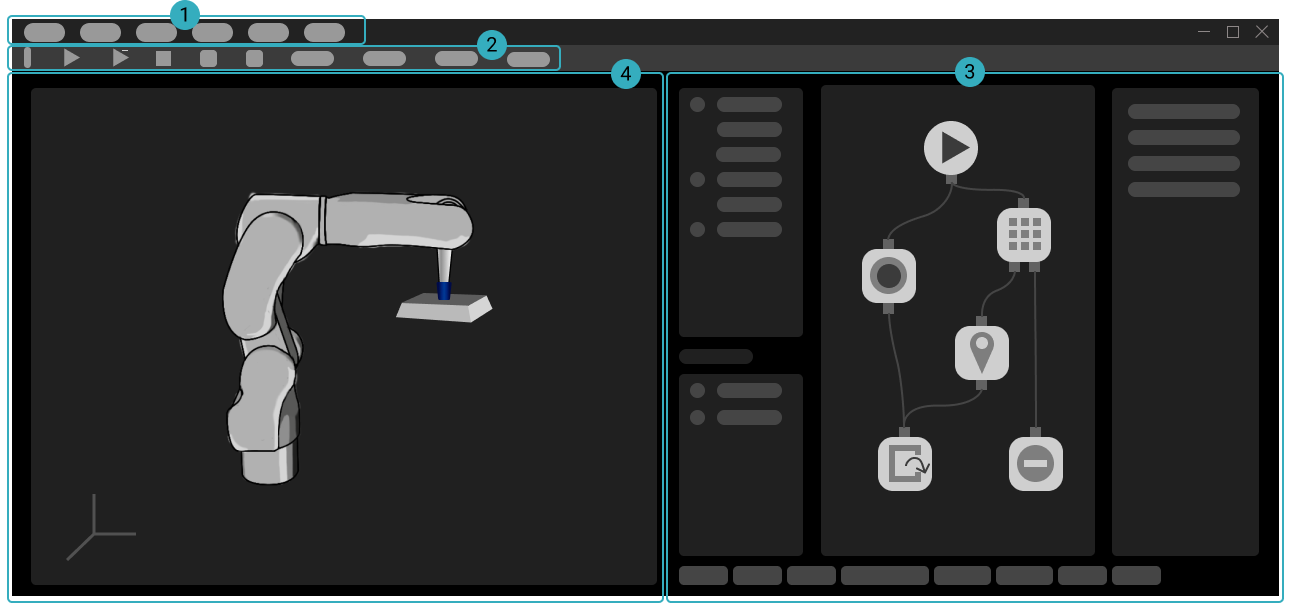
主界面由 4 部分组成:
① 菜单栏 :工程操作相关的基础功能,以及视图调整、显示更改在内的辅助工具。
② 工具栏 :用于仿真工程,控制机器人运行,调节机器人运行速度等。
③ 功能面板 :用于完成工程相关的必要配置,包含8个功能面板,分别为:
④ 三维仿真空间 : 在工程运行或仿真过程中显示机器人的运行轨迹、碰撞检测结果、视觉位姿、点云等。
三维仿真空间概览¶
三维仿真空间是一个可编辑的可视化窗口,熟悉三维仿真空间可帮助用户更好地了解 Mech-Viz 的各项功能。
三维仿真空间基础操作¶
旋转视角 |
长按鼠标左键并向任意方向拖动 |
|
视角切换菜单 |
单击鼠标右键 |
|
平移视角 |
长按鼠标中键并向任意方向拖动 |
|
缩放 |
滚动滑轮 |
|
场景物体显示¶
在工程搭建状态下三维仿真空间主要由下图所示部分构成。默认初始状态只有地面与机器人模型。

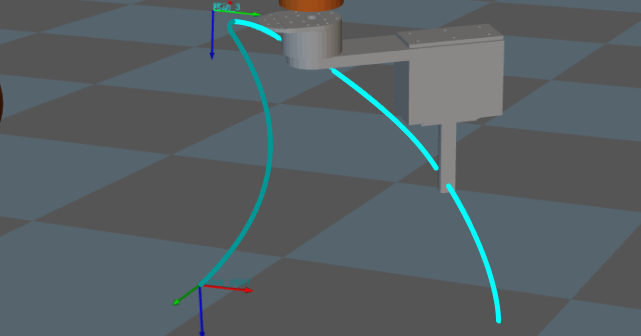
运动轨迹显示¶
无论是在控制真实机器人运行,还是在仿真虚拟机器人运动过程中,三维仿真空间均可以显示机器人即将行进的轨迹。用户可通过仿真轨迹更合理地规划机器人运动轨迹。
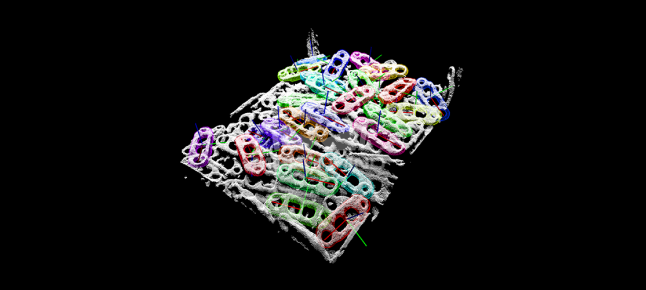
点云及抓取点显示¶
软件每次都会将视觉服务返回的视觉结果显示在三维仿真空间内。通常,一份完整的视觉结果包括:相机拍摄到的工件及场景点云、工件位姿、工件序号以及代表工件特性的工件标签。
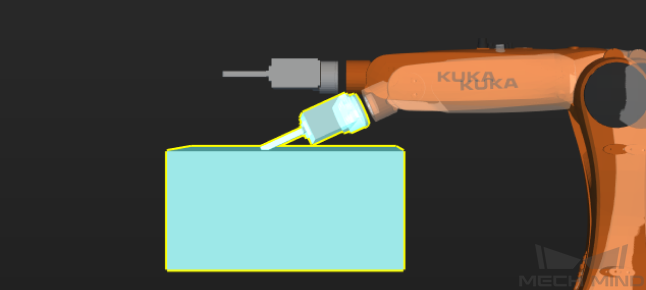
碰撞预判显示¶
工程运行时,Mech-Viz 会在机器人运动路径中检测机器人本体和末端执行器是否会与场景物体、工件及料筐等发生碰撞。当检测到碰撞时,软件会在三维仿真空间中将发生碰撞的双方高亮显示(如下图所示)。