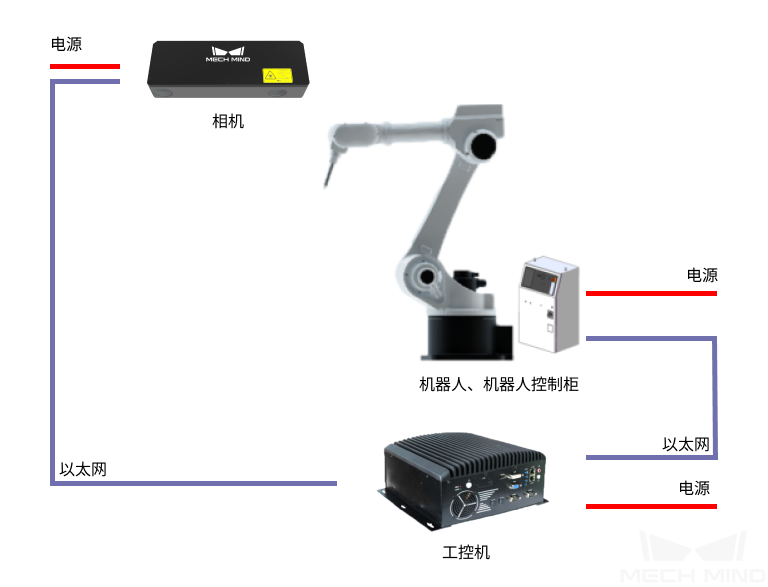
连接整个系统
为了建立各个硬件之间的联系,安装好相机与机器人之后,需要使用线缆将它们连接到工控机。
相机连接到工控机
使用本公司配备的网线,连接 相机 和 工控机 。
工控机有多个网口,选择任意一个连接即可。之后可依据需求更改相应网口的网段。
机器人连接到工控机
使用网线连接 机器人控制柜 和 工控机 ,连接完毕后,开启控制柜电源并打开示教器。
注意
注意机器人控制柜端网口的选用,详见 机器人通信配置 。
注意将线缆正确摆放,避免线缆与机器人危险缠绕。
IP 设置及机器人通信配置
至此,整个硬件系统连接完毕,请最后检查电路并上电。继续查看下一章内容来配置工控机上的软件。