Software Suite
v1.6
无标题文档
Mech-Mind
其他版本
版本:
latest
1.5
1.4
1.3
1.2
返回主页
官网
留言
修订历史
PDF下载
退出登录
开始
软件更新说明
软件安装指南
开始你的第一个应用
概览
获取相机及其配件
安装相机
连接整个系统
安装软件并测试连接
连接相机并采集图像
配置机器人模型并连接真实机器人
实现首次抓取
软件使用指南
Mech-Vision
Mech-Viz
Mech-Center
机器人通信配置指南
通信概述
主控通信
标准接口通信
应用指南
梅卡曼德视觉系统搭建
项目部署建议
注意事项
应用案例
附录
软件使用前提
支持
术语表
FAQ
Software Suite
Docs
»
概览
»
安装软件并测试连接
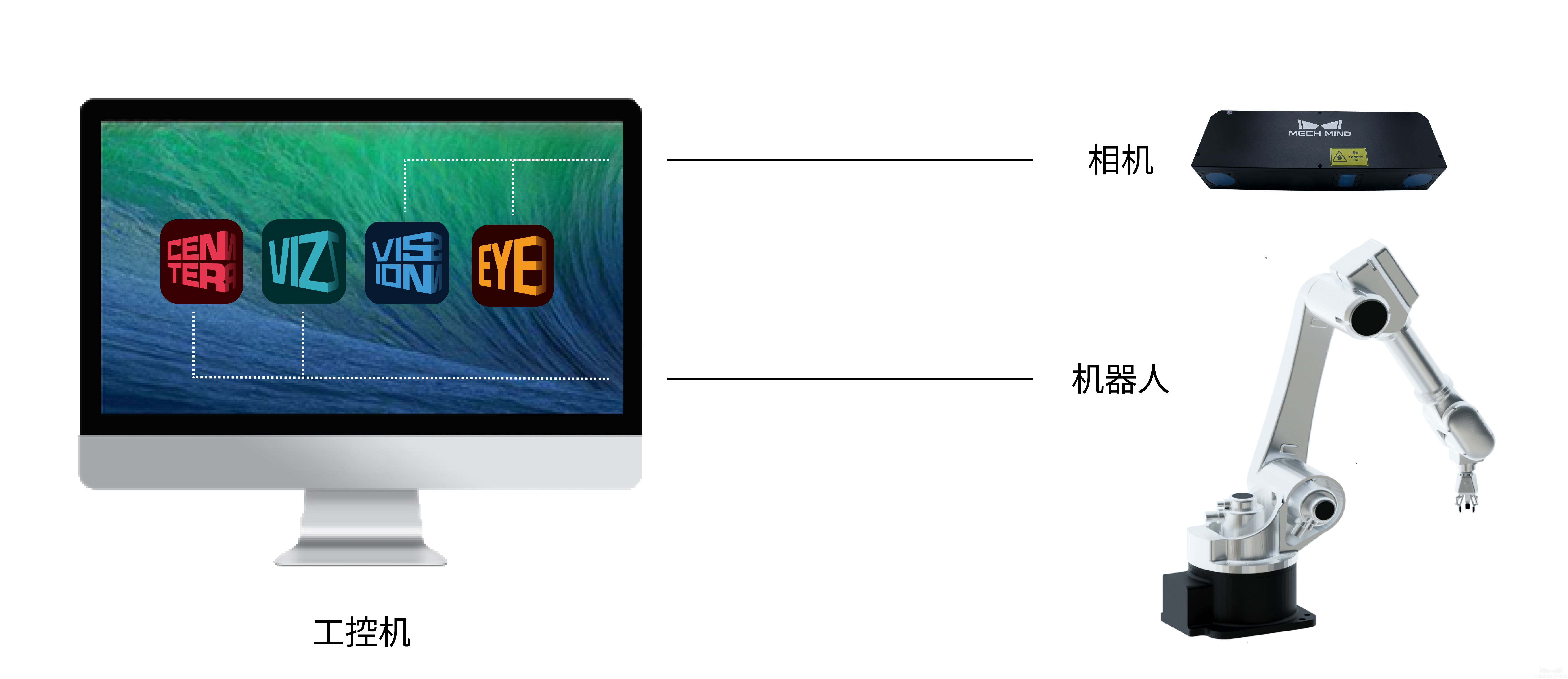
安装软件并测试连接
¶
按照以下步骤来完成相关配置,以使软件能够正常控制硬件。
连接相机并采集图像
配置机器人模型并连接真实机器人