开始
开始你的第一个应用
软件使用指南
机器人通信配置指南
应用指南
附录
开始本节内容之前,请确保已经按要求完成前面章节内容的配置。
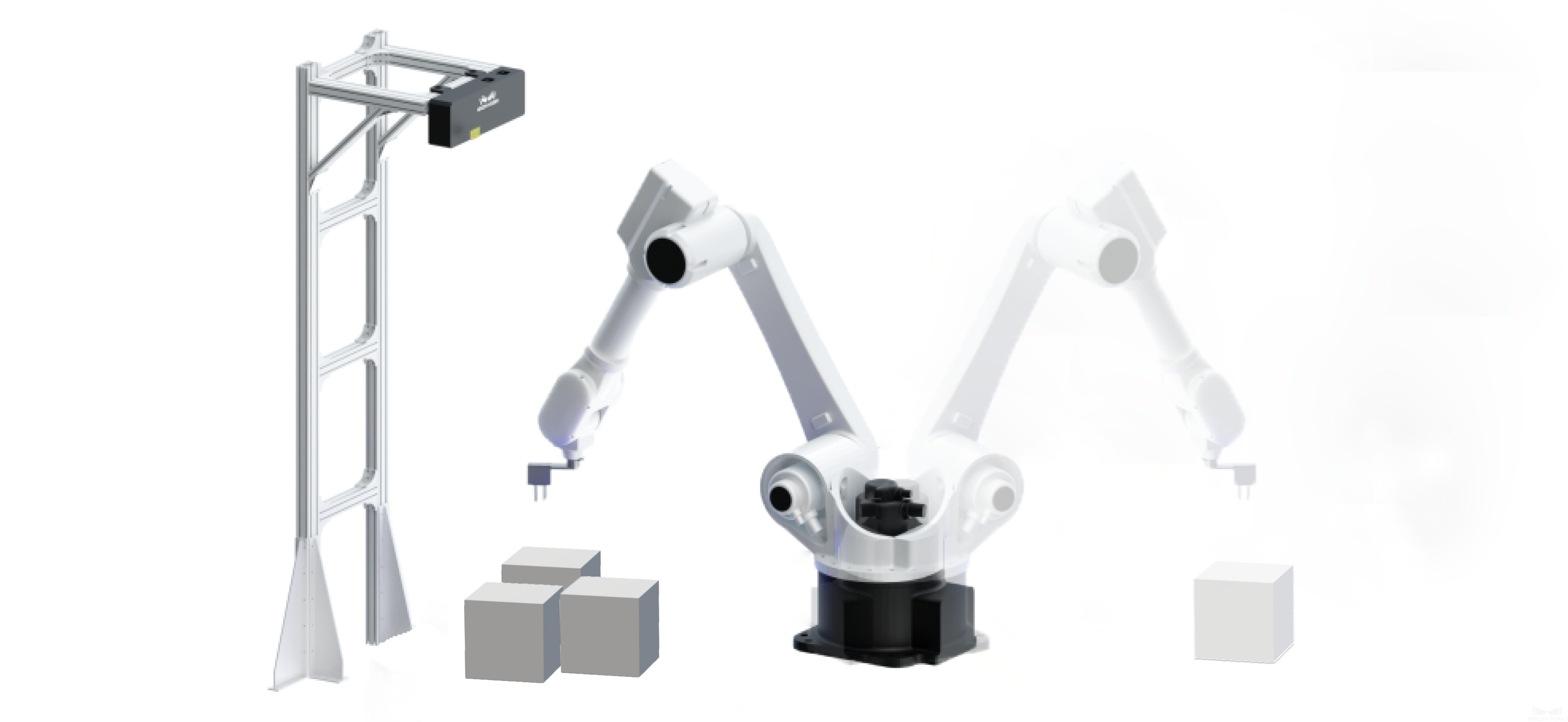
在本章内容中,用户将通过使用本公司软件完成纸箱位姿的获取、机器人运动路径的仿真并最终借助真实机器人完成纸箱的抓取与放置。