规划历史¶
规划历史面板可查看运行 Mech-Viz 工程时的规划信息及错误描述,有助于对工程进行调试。本节对规划历史面板相关内容进行介绍,主要包括以下内容。
概览¶
功能介绍¶
当运行 Mech-Viz 的过程中出现问题时,如碰撞报警、位置不可达等,可使用 规划历史 查看原因。
规划历史结果的整体结构为树状结构,详细完整地记录了 Mech-Viz 规划的全过程。相比于日志,规划历史能够详细地查看规划的每一节点(尤其是失败的节点)。
有些错误是串行错误,若其中一个子节点规划失败,则整体规划失败。例如,若某个关节角设置错误,则机器人无法到达规划的位置。
有些错误是并行错误,若只有一个子节点规划成功,则整体规划成功。例如,Mech-Vision 计算输出的抓取点中,如果其中任意一个节点运行结果为成功,则表明可利用该抓取点对物体进行抓取。
提示
在运行工程的过程中,可重点关注失败的节点。
面板介绍¶
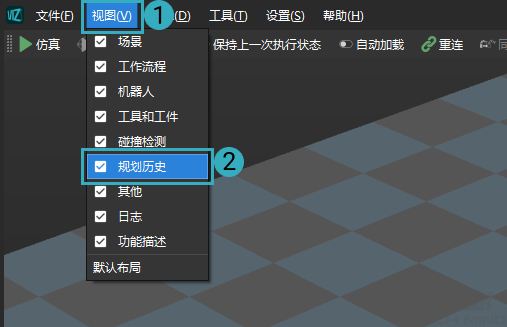
规划历史 面板位于 Mech-Viz 功能面板中。

如果功能面板中未出现 规划历史 ,可在 Mech-Viz 软件菜单栏中单击 视图 ,然后勾选 规划历史 。
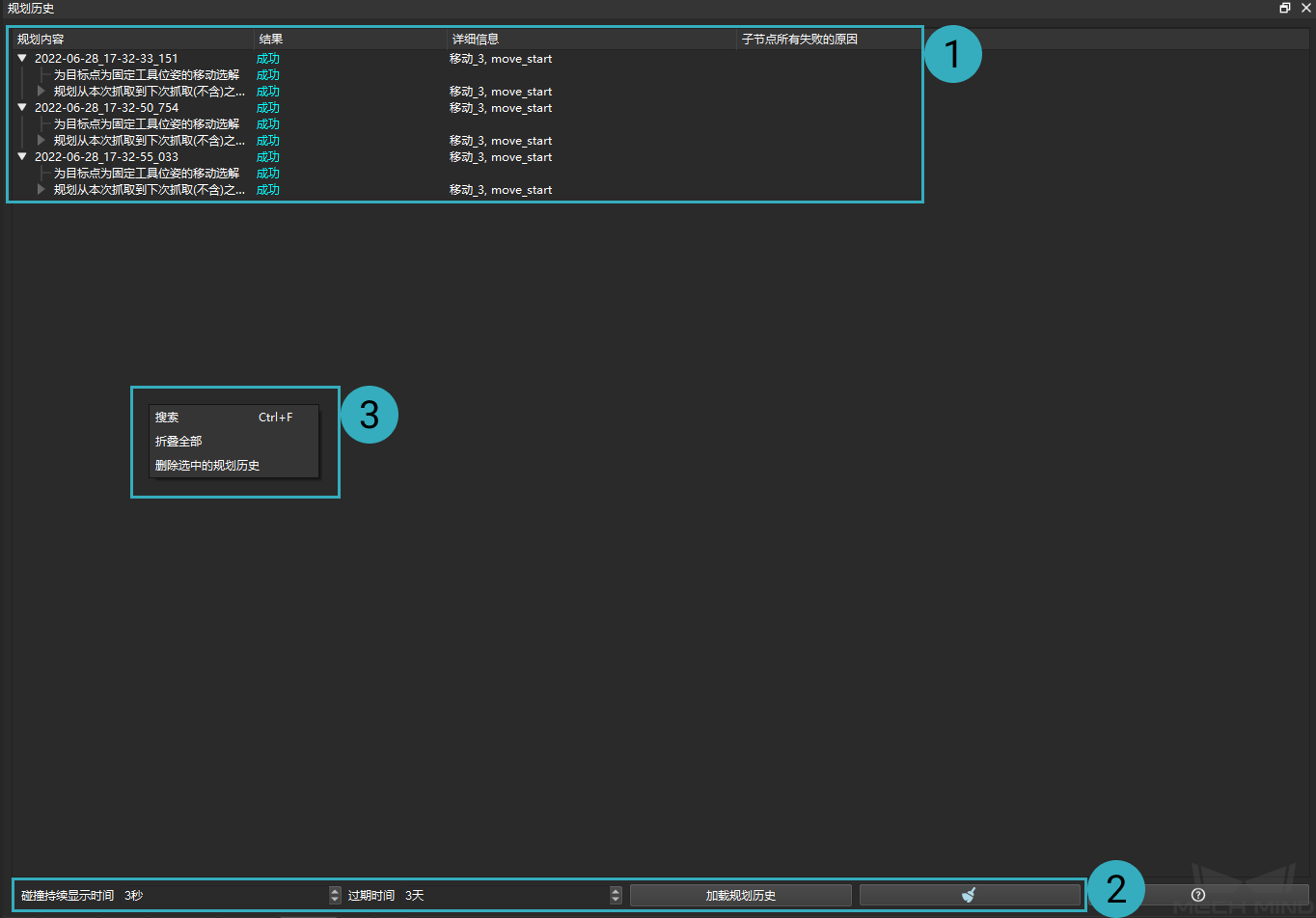
规划历史面板包括:① 规划内容、结果(成功与失败)、详细信息、子节点所有失败的原因;② 碰撞持续显示时间、过期时间、加载规划历史、清除、帮助;③ 右键单击后出现的搜索、折叠全部、删除选中的规划历史功能。
面板中各个选项或按钮的功能介绍如下:
规划历史面板顶部选项:

规划内容: 可通过名称查看具体时刻的规划历史。展开后将显示每一层级的规划内容。
结果: 显示本次规划是否成功,失败时显示红色。可重点展开失败的条目查看具体信息。
详细信息: 显示规划的某一段路径中的移动任务,以及此次规划中任务的操作细节。
子节点所有失败的原因: 当规划失败时,此处显示具体失败原因。
规划历史面板底部按钮或选项:

碰撞持续显示时间: 通过规划历史查看碰撞显示的时间,如果超过此时间,规划失败的机器人位姿将消失。
过期时间: 保存规划历史数据的时间,如果超过此时间,当前数据将覆盖历史数据。
加载规划历史: 加载曾经保存的规划历史。
清除: 清除当前界面的规划历史。
帮助: 规划历史简介。
在规划历史面板中单击鼠标右键弹出的选项:
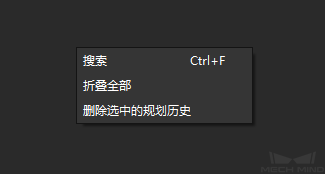
搜索: 单击 搜索 后,在规划历史面板底部将出现相关的搜索功能,可按规划历史结果的类型搜索规划历史内容。

折叠全部: 将规划历史中的子节点全部折叠,只显示父节点。
删除选中的规划历史: 将选中的规划历史删除。
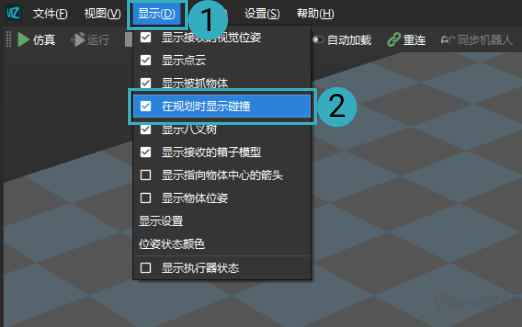
碰撞结果的可视化¶
规划历史详解¶

机器人自体碰撞¶

问题原因: 规划历史结果显示 机器人自体碰撞 ,可通过子节点查看具体原因。在当前任务处可看到 移动_2 任务中机器人腕部和大臂碰撞。
解决方法: 调整机器人关节角、工具位姿,避免自体碰撞。
与场景物体碰撞¶
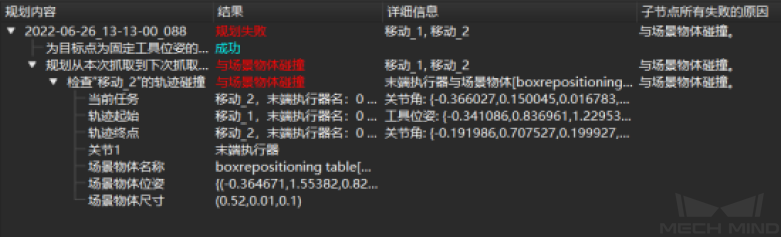
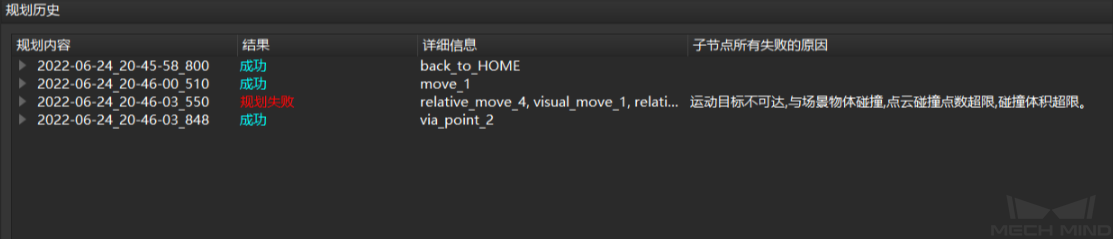
问题原因: 规划历史结果显示子节点所有失败原因为 与场景物体碰撞 ,在规划内容处展开子节点,在当前任务处可看到碰撞的位置, 移动_1 到 移动_2 过程中,末端工具和场景模型发生碰撞。
解决方法: 调整机器人位姿或工具位姿,避免与场景模型的碰撞。或调整碰撞模型位置。

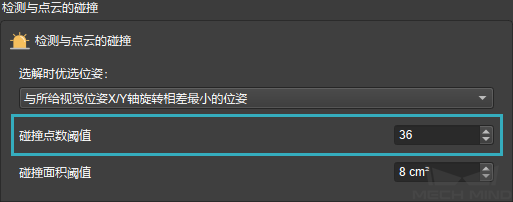
点云碰撞点数超限¶

问题原因: 尝试下图中抓取位姿时,碰撞点数为 37 ,超过了设定的阈值(此处设定的阈值为 36 ),检测到了碰撞。
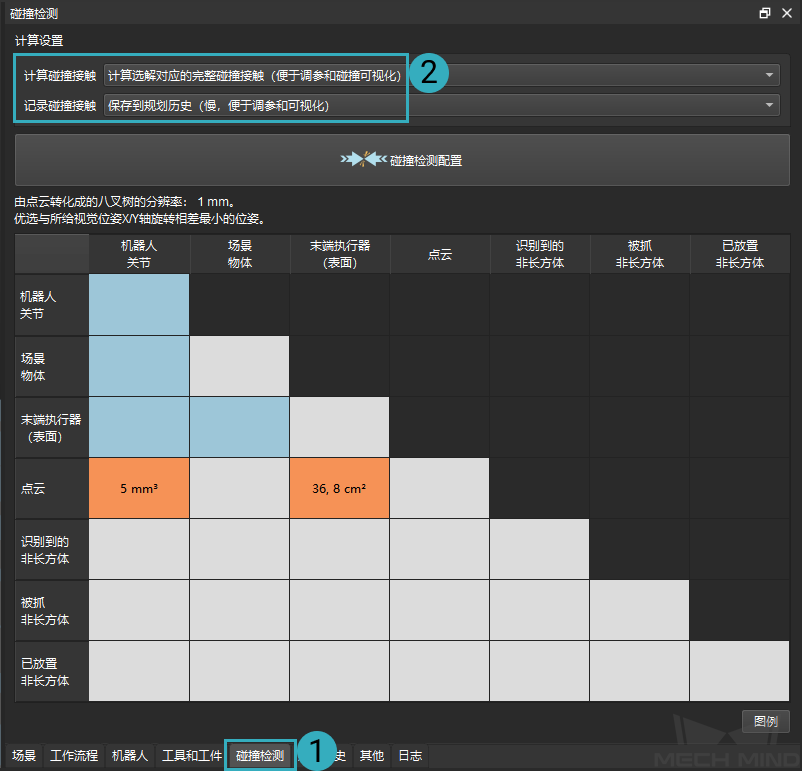
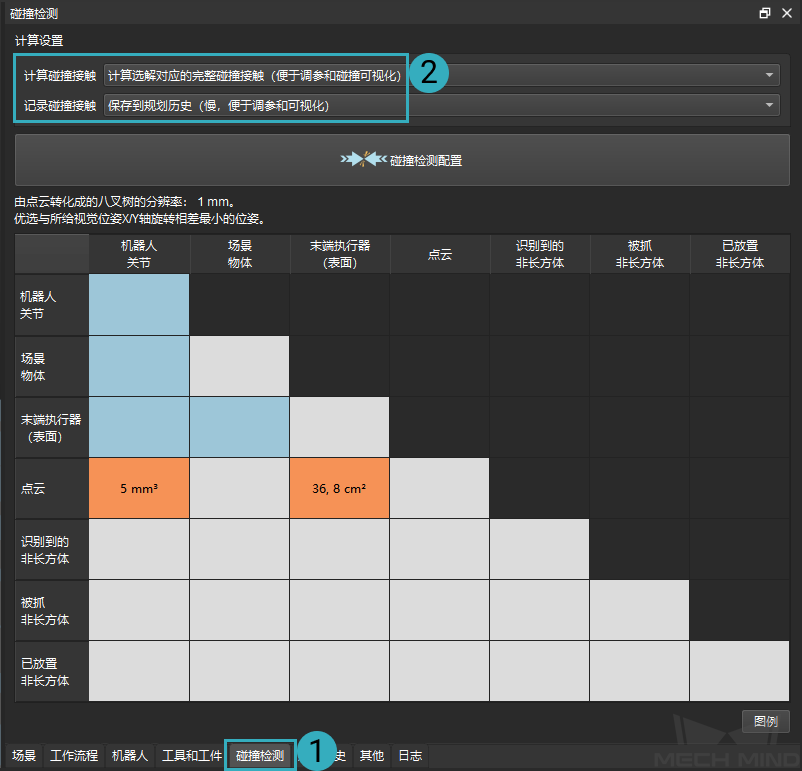
解决办法: 观察真实机器人在工作过程中是否真的存在碰撞,并且在碰撞检测面板中 计算碰撞接触 和 记录碰撞接触 处分别选择 计算选解对应的完整碰撞接触 和 保存到规划历史 ,然后在规划历史面板查看具体原因。还可以调整碰撞点数阈值、抓取点、TCP 位置、夹具模型位置等。
点云碰撞面积超限¶
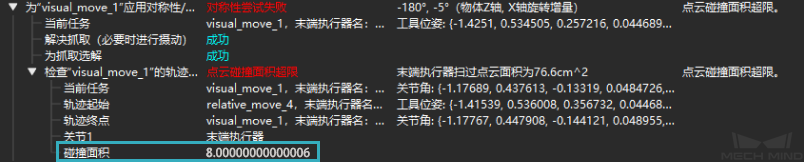
问题原因: 尝试上图中抓取位姿时,碰撞面积为 8.00000000000006 ,超过了设定的阈值(此处设定的阈值为 8 ),检测到了碰撞。
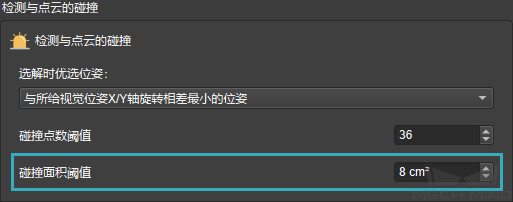
解决办法: 观察真实机器人在工作过程中是否真的存在碰撞,并且在碰撞检测面板中 计算碰撞接触 和 记录碰撞接触 处分别选择 计算选解对应的完整碰撞接触 和 保存到规划历史 ,然后在规划历史面板查看具体原因。还可以调整碰撞面积阈值、抓取点、TCP 位置、夹具模型位置等。