机器人¶
在搭建工程时,通常从选择或导入机器人开始,机器人面板用于模拟真实机器人并操作已连接的真实机器人。本节主要包含以下内容:
在主界面的右下角,单击①处 机器人 ,进入机器人面板,如下图所示。
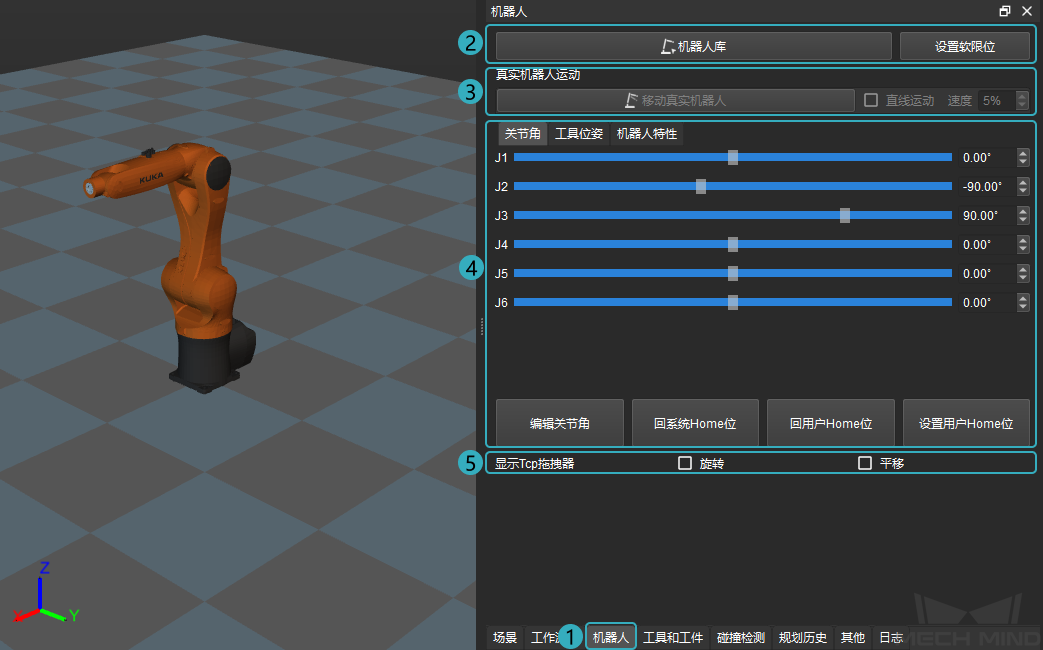
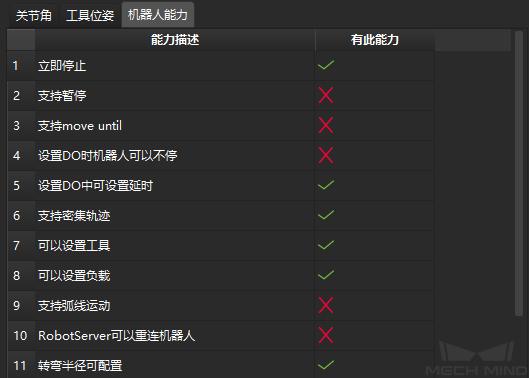
在上图中,②处 配置机器人 ;③处设置 真实机器人运动 ;④处设置 关节角 和 工具位姿 ,以及显示 机器人能力 ;⑤处设置是否 显示 TCP 拖拽器 。
配置机器人¶
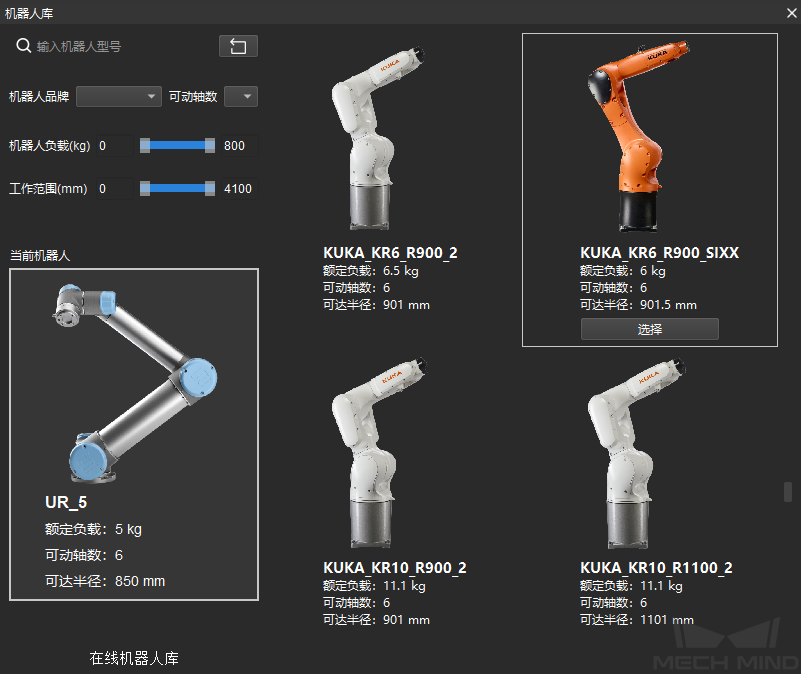
单击 机器人库 后,在弹窗中可以通过选择机器人品牌和型号以将机器人导入三维仿真空间,如下图所示。
用户若在机器人库未找到所需的机器人,则可以查看本公司提供的其他 机器人安装包 列表(或单击上图左下角的 在线机器人库)中是否包含所需的机器人。
若查找到所需机器人,单击列表中具体机器人品牌名称,便可下载相应安装包。用户可以使用以下任一方法将其导入 Mech-Viz 软件中:
按下鼠标左键将下载的安装包文件拖拽至 Mech-Viz 软件窗口中,松开鼠标左键后,提示导入机器人成功。
在菜单栏中,选择 ,选择下载的安装包文件,单击 打开 ,提示导入机器人成功。
若还未查找到所需机器人,则需要 制作机器人模型 ,然后将其导入 Mech-Viz 软件中。
上图中,各部分的介绍如下:
搜索框 :输入机器人品牌和型号,英文不区分大小写。单击
 按钮可以清除输入框中的内容。选择 机器人品牌 、 可动轴数 、 机器人负载 、 工作范围 也可筛选所需的机器人。
按钮可以清除输入框中的内容。选择 机器人品牌 、 可动轴数 、 机器人负载 、 工作范围 也可筛选所需的机器人。搜索结果 :将在右方显示。鼠标悬停于待选择的机器人上会显示白色边框和 选择 按钮,单击该按钮,选中的机器人便会出现在三维仿真区内。
当前机器人 :显示当前在三维仿真区内的机器人信息。
软限位是软件中设定的各轴运动范围限值。单击 设置软限位 可以为机器人的各轴设置软限位,如下图所示。
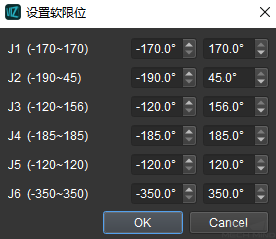
设定软限位后,与关节角相关的任务(如移动)在设置关节角时,取值范围就是此处设置的范围。
注意
此处设置的软限位是 Mech-Viz 软件内定义的软限位,仅在 Mech-Viz 软件内使用。此设定不影响机器人示教器端的软限位设置。
真实机器人运动¶
在已连接真实机器人的情况下,通过单击 移动真实机器人 可以将真实机器人移动到仿真机器人的当前关节位置,从而实现同步移动真实机器人。在 移动真实机器人 右侧还可以勾选 直线运动 并设置其 速度 。

注意
在已连接真实机器人的情况下,若需要和真实机器人同步,还需单击软件上方工具栏中的 同步机器人 。
关节角¶
关节角 选项下显示仿真机器人当前的关节角数据。若需要调整仿真机器人位姿,拖动各轴的滑块或者直接在右侧输入框中输入数值,仿真机器人将会根据调整实时移动。
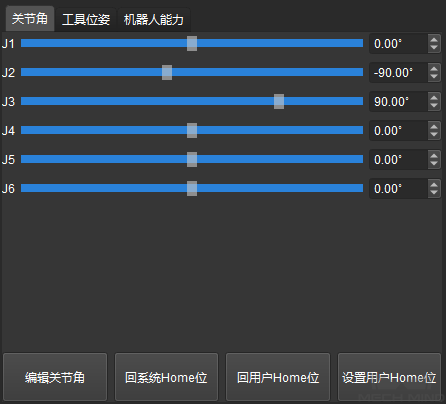
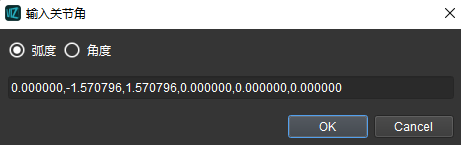
编辑关节角 :在弹窗中可以一次性输入各轴的关节角数值(单位可选弧度、角度,1°=π/180,1rad=(180/π)°)。
回系统 Home 位 :仿真机器人将回到机器人配置文件中设定的初始位置(系统默认的 Home 位)。
回用户 Home 位 :仿真机器人将回到用户自定义的初始位置,此位置通过右侧的 设置用户 Home 位 进行设置。
设置用户 Home 位 :拖动各轴的滑块或者直接在右侧输入框中输入数值,然后单击该按钮,便可将当前关节位置设置为用户自定义 Home 位。
下图中左侧为调整前的参数值,右侧为调整后的参数值。

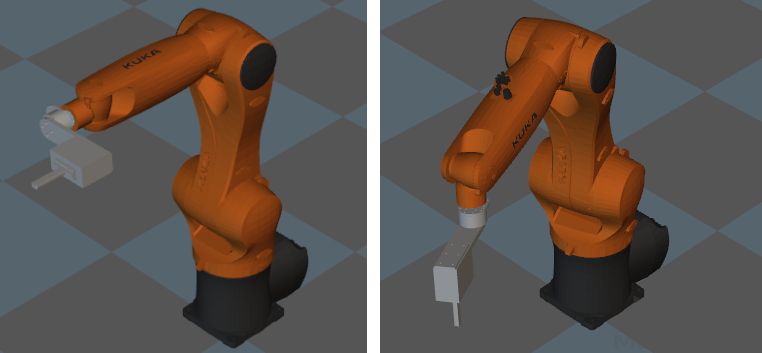
下图中左侧为调整前的仿真图,右侧为调整后的仿真图。

工具位姿¶
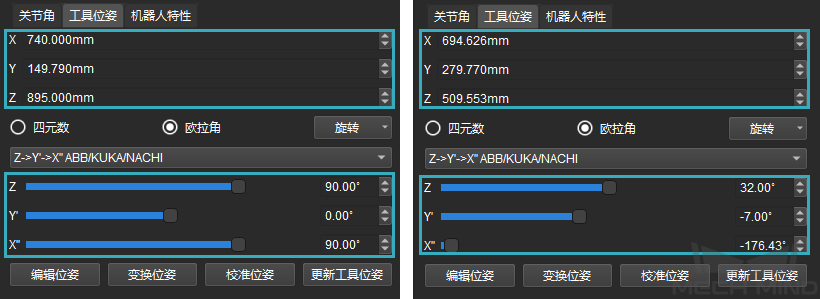
工具位姿 选项下显示仿真机器人当前的工具位姿数据。通过下方的 四元数 和 欧拉角 选项可以对工具位姿进行调整,也可通过 编辑位姿 直接输入工具位姿。
下图中左侧为调整前的参数值,右侧为调整后的参数值。
下图中左侧为调整前的仿真图,右侧为调整后的仿真图。
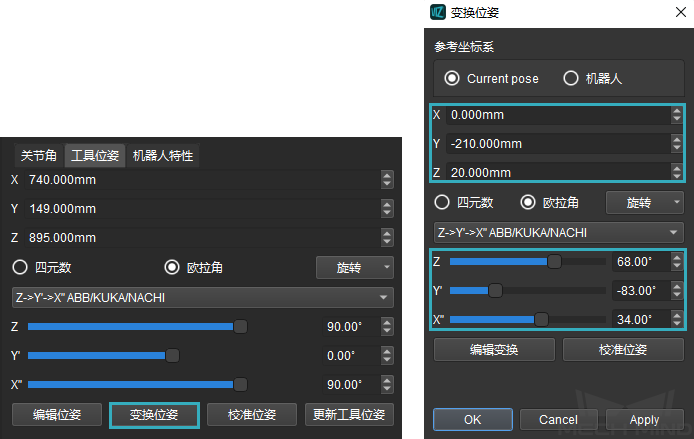
变换位姿 :通过定义变换的方式将当前位姿变换到新位姿。首先需要选择参考坐标系,然后通过 XYZ 坐标、四元数、欧拉角或 编辑变换 定义变换,仿真机器人会实时显示变换结果。若需要保存变换结果,请单击 Apply ,再单击 OK ;若不需要保存变换结果,请单击 Cancel 退出,仿真机器人将回到原位。
下图中左侧为工具调整前的位姿,右侧为相对当前位姿调整参数值。
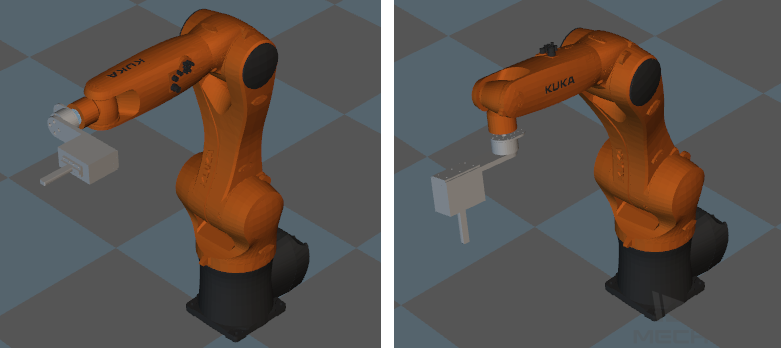
下图中左侧为调整前的仿真图,右侧为调整后的仿真图。
校准位姿 :设置 P1、P2 和 P3 点的坐标并运用三点校准法对工具位姿进行校准。

更新工具位姿 : 在已连接真实机器人的情况下,Mech-Viz 将从真实机器人获取工具位姿。
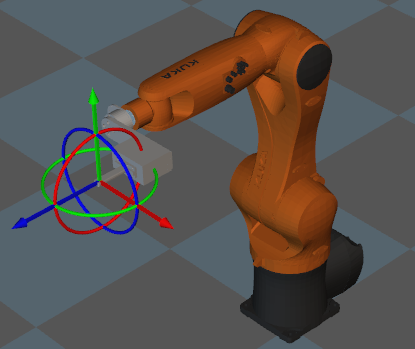
显示 TCP 拖拽器¶
此选项指仿真机器人上末端执行器的拖拽器。若勾选 旋转 和 平移 选项,用户可以按住 ctrl 键,同时使用鼠标左键选中拖拽器的某个平移轴或旋转轴进行拖拽,从而直观地调整工具位姿。