4. 被抓物体配置¶
被抓物体用于检测转移物体过程中的碰撞,主要分为两类:
4.1. 长方体¶
长方体模型添加方式:
在 Mech-Vision 中使用 计算矩形的尺寸和位姿 、 计算平面点云的位姿和尺寸 、 读取物体尺寸 来计算物体尺寸,并将计算结果通过 输出 发送到 Mech-Viz,Mech-Viz 将自动生成对应的碰撞模型。
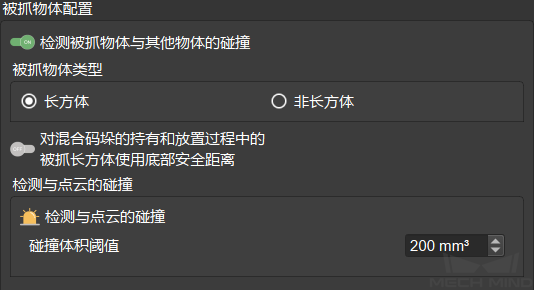
长方体安全底部距离设置:
调节说明:在长方体类型物体配置中有一个设置安全底部距离的功能,主要目的是对已抓取的箱子碰撞模型底部进行加厚,用来选择更加安全的放入路径,避免箱子在移动时与已放置的箱子碰撞,如下图所示。 该功能目前仅用于 混合码垛 ,且必须开启。参数设置:开启 对混合码垛的持有和放置过程中的被抓长方体使用底部安全距离 ,然后设置 长方体安全底部距离 ,建议值为 80mm-120mm。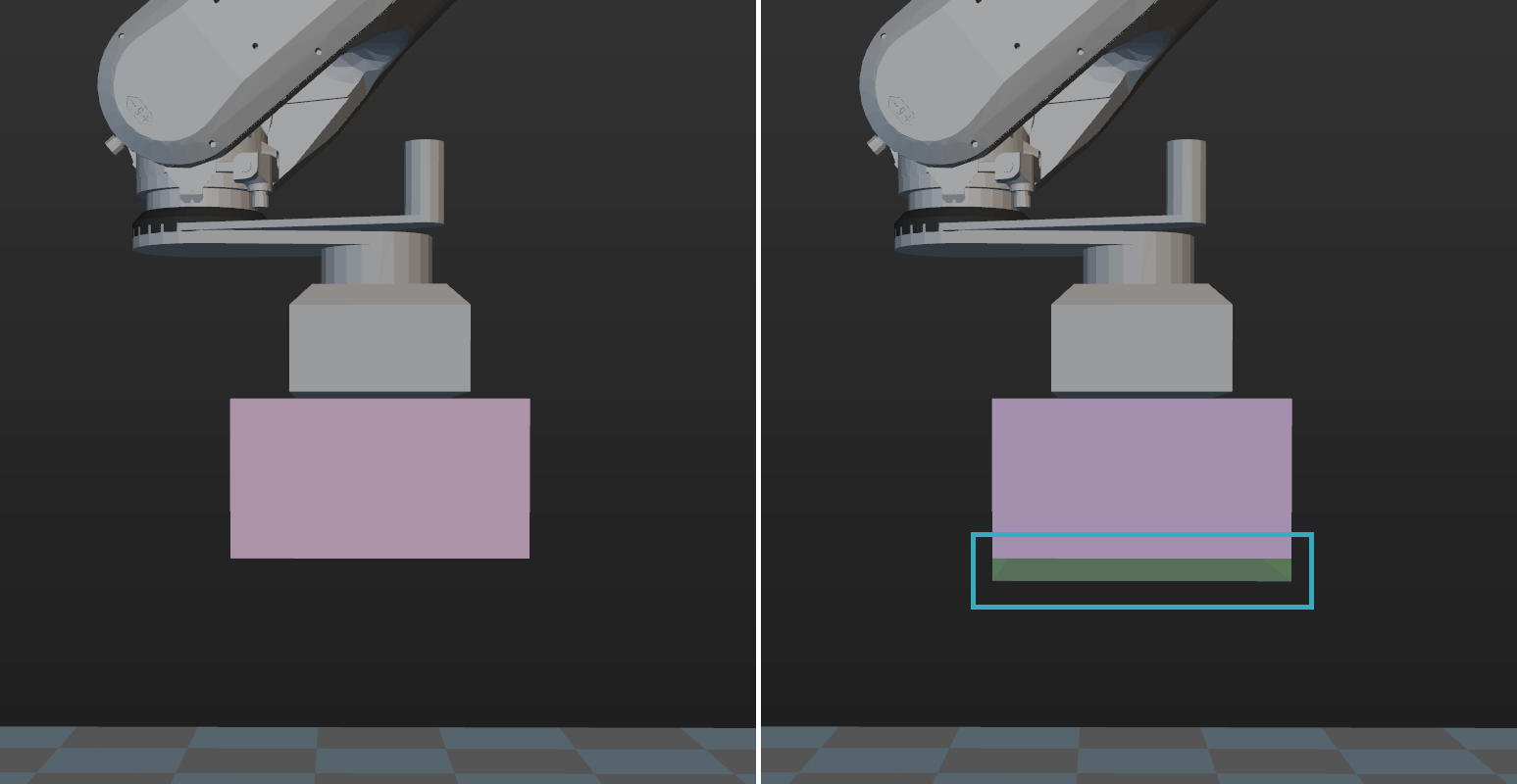
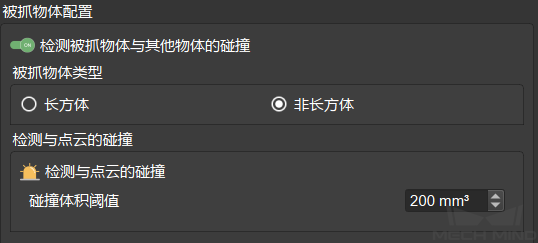
碰撞体积阈值设置:
指进行碰撞检测时允许被抓长方体与其他部分碰撞的体积。
设置完成后,所得到的就是含有被抓长方体的碰撞检测场景,如下图所示。