3. 机器人关节配置¶
在碰撞检测中机器人关节的碰撞检测是一直默认保持开启的,机器人关节配置主要是设置检测机器人关节与点云碰撞的相关参数。
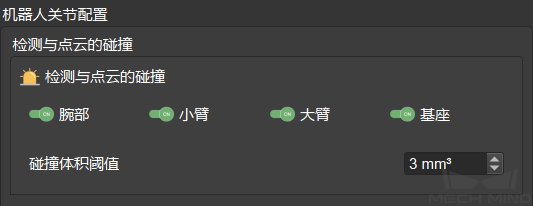
机器人划分成:腕部、小臂、大臂、基座 四个部分。用户可选择希望参与碰撞检测的部分,开启的部分将高亮显示,如下图所示。
碰撞体积阈值
默认值:3调节说明:指进行碰撞检测时允许机器人与点云的碰撞体积,由于机器人是 STL 格式模型,故只检测机器人模型表面于点云的碰撞,所以这里的碰撞体积是指 机器人模型表面与体素的碰撞点个数 乘 体素的体积 。
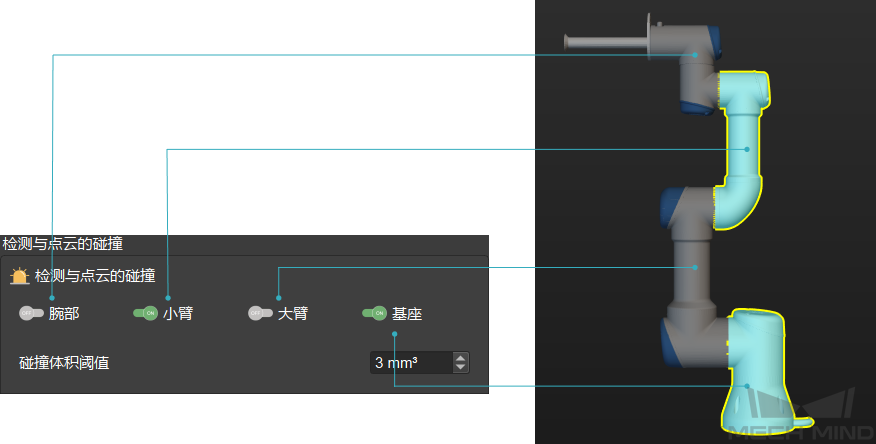
在碰撞检测中机器人关节的碰撞检测是一直默认保持开启的,机器人关节配置主要是设置检测机器人关节与点云碰撞的相关参数。
机器人划分成:腕部、小臂、大臂、基座 四个部分。用户可选择希望参与碰撞检测的部分,开启的部分将高亮显示,如下图所示。
碰撞体积阈值
默认值:3调节说明:指进行碰撞检测时允许机器人与点云的碰撞体积,由于机器人是 STL 格式模型,故只检测机器人模型表面于点云的碰撞,所以这里的碰撞体积是指 机器人模型表面与体素的碰撞点个数 乘 体素的体积 。