2. 末端工具配置¶
添加末端工具模型请参考 添加模型 。
在碰撞检测中末端工具的碰撞检测是一直默认保持开启的,末端工具配置主要是对 STL 和 OBJ 两种不同格式的工具模型进行选择以及对应的参数设置。
查看 STL 和 OBJ 模型简介 来了解 STL 与 OBJ 格式模型。 两种格式的选择主要取决于是否对于点云的碰撞检测有较高的要求,即能够检测到夹具内部的点云碰撞。
STL
OBJ
碰撞检测模型类型
Mesh(三角面片)
凸多面体组合体(实心)
工业制图
广泛采用
极少采用
检测碰撞合理性
只能检测到三角面表面碰撞(空心)
严格高效
参数调节适应性
较为复杂的场景难以调参
调参方便,适应性强
2.1. STL 格式¶
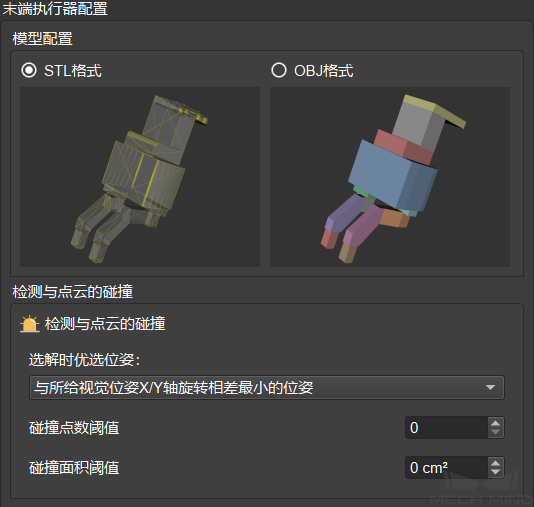
参数设置:
点云的碰撞点数阈值:
默认值:0调节说明:指允许在抓取时模型表面碰撞的点云数量。碰撞面积阈值:
默认值:0调节说明: 指允许点云在一条路径中扫过模型表面的面积。选解时优选位姿:
与所给视觉位姿 X/Y 轴旋转相差最小的位姿:指以视觉移动给出的排序后的位姿为所给位姿,给出与所给位姿的 X/Y 轴旋转角度最小的位姿进行检查。X/Y 轴旋转范围内碰撞最轻的位姿: 指计算所有 X 轴和 Y 轴对称性的点云碰撞情况,然后按照碰撞从轻到重进行排序。
2.2. OBJ 格式¶
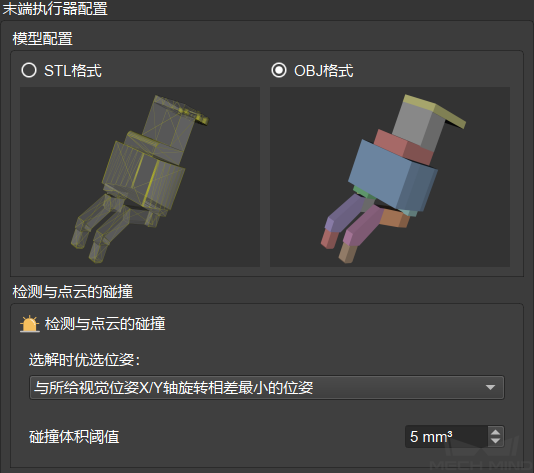
参数设置:
碰撞体积阈值:
默认值:5调节说明:指进行碰撞检测时允许末端工具与点云的碰撞体积。选解时优选位姿:
与所给视觉位姿 X/Y 轴旋转相差最小的位姿:指以视觉移动给出的排序后的位姿为所给位姿,给出与所给位姿的 X/Y 轴旋转角度最小的位姿进行检查。X/Y 轴旋转范围内碰撞最轻的位姿:指计算所有 X 轴和 Y 轴对称性的点云碰撞情况,然后按照碰撞从轻到重进行排序。
2.3. 调参经验¶
在考虑碰撞检测的时候(尤其是散乱零件抓取),需要考虑是否可以接受工件在被抓取的时候,夹具碰到其他工件甚至是移动其他工件。
可以将用筷子夹取碗里的彩虹豆作为类比,筷子在夹取的时候即使碰到其他的彩虹豆但是并不会对彩虹豆有任何的影响。在这样的情况下,碰撞检测的阈值可以开的较大(宽松),允许部分碰撞的发生,这样能够保证更高的抓取率。同样也应该了解到,当筷子碰到其他彩虹豆的时候,目标物也可能移动。 当在抓取不可移动的物体时,如曲轴,任何的碰撞都是不可接受的,此时就应该收缩碰撞检测阈值,避免碰撞的发生。
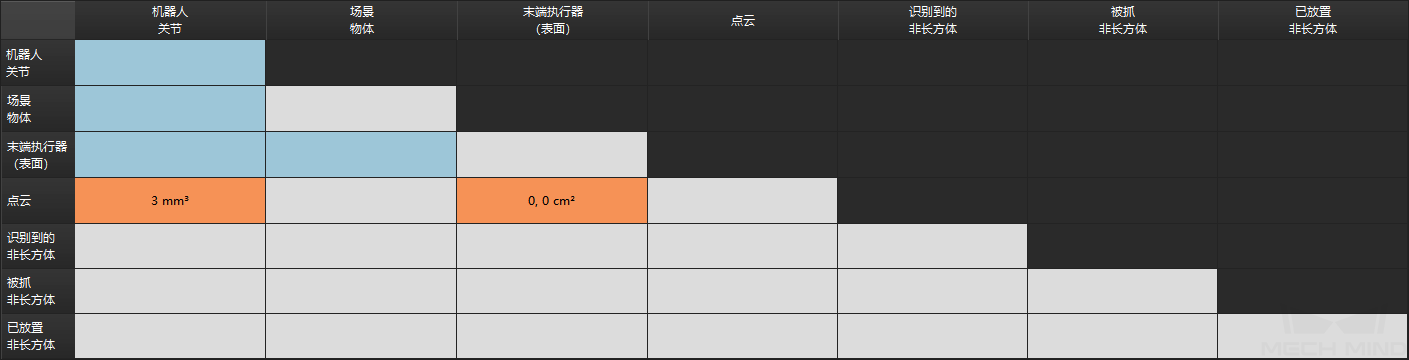
设置完成后,所得到的就是包含末端工具的碰撞检测场景,如下图所示。