末端工具配置¶
在 工具和工件 面板中,可以对末端工具进行配置,用于更好地对目标物体进行抓取。本节主要包括以下内容:
末端工具配置面板¶
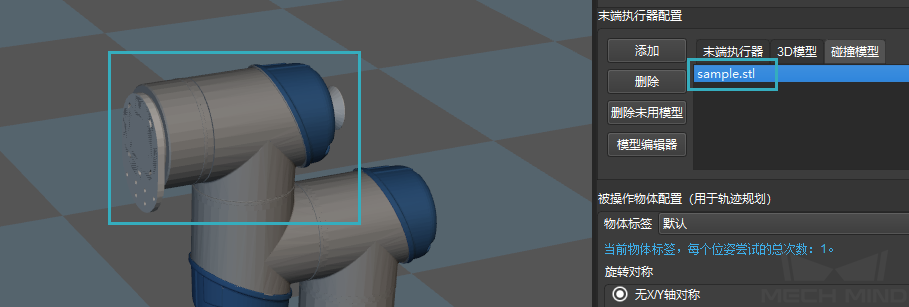
末端工具的配置面板如下图所示。

面板中各个按钮或选项的功能描述如下:
末端工具: 列表中显示已添加的末端工具模型。
3D 模型: 列表中显示已添加的 3D 模型。
碰撞模型: 列表中显示已添加的碰撞模型。
添加: 可添加末端工具、3D 模型或碰撞模型。
删除: 可删除已选中的末端工具、3D 模型或碰撞模型。
删除未用模型: 可删除未使用的 3D 模型或碰撞模型。
模型编辑器: 可对模型进行编辑、简化,具体内容可参考 模型编辑器 。
提示
当添加多个末端工具模型时,默认使用列表中第一个末端工具模型。
添加模型¶
添加 3D 模型和碰撞模型,可以用来辅助 Mech-Viz 软件进行碰撞检测和路径规划。
其中,3D 模型只用于可视化显示;碰撞模型不仅用于可视化显示,而且参与碰撞检测的计算。所以添加模型时,推荐只添加碰撞模型。
若加载的碰撞模型为 OBJ 格式,为保证无碰撞风险,请先了解 OBJ 格式碰撞模型说明 中的内容。
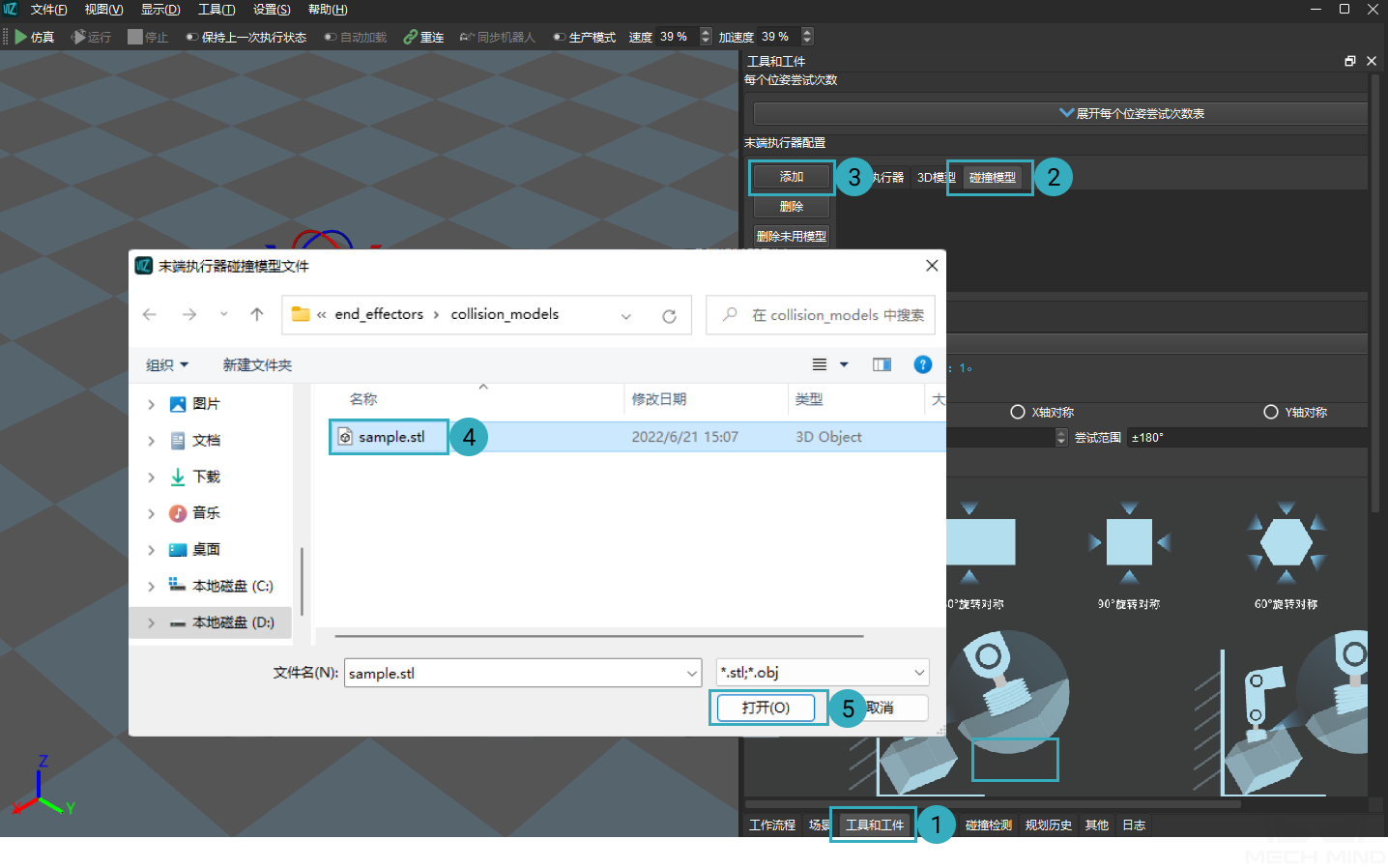
在功能面板中单击 工具和工件 ,进入末端工具配置面板。依次单击 ,在文件选择界面中单击选中碰撞模型文件后,单击 打开 。
模型类型
说明
全是由凸多面体组成的 OBJ 模型
正常加载
非全由凸多面体组成的 OBJ 模型
“OBJ 模型转换”弹窗提示
“OBJ 模型转换”弹窗提示如下图所示。 单击 OK 将完成模型转换并加载模型。转换后的模型形状可能发生变化,用户需使用 Blender 或 Mech-Viz 中的“模型编辑器”处理此类模型以确保 OBJ 模型符合要求。
单击 OK 将完成模型转换并加载模型。转换后的模型形状可能发生变化,用户需使用 Blender 或 Mech-Viz 中的“模型编辑器”处理此类模型以确保 OBJ 模型符合要求。在 碰撞模型 列表中双击导入的模型,然后在弹出的 编辑模型变换 窗口中调整参数。
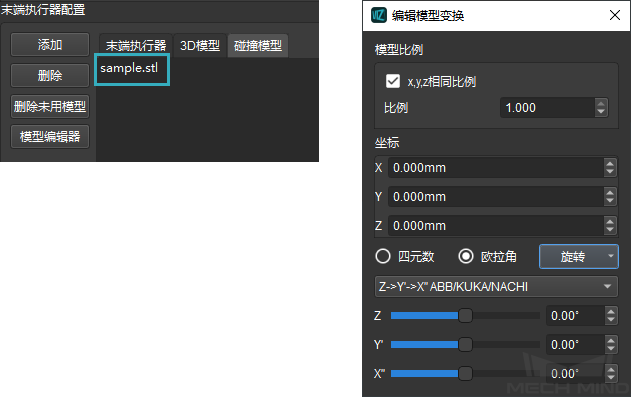
如上图中右图所示,可通过调整各个参数对末端工具模型进行配置。该窗口中主要按钮或选项的功能描述如下:
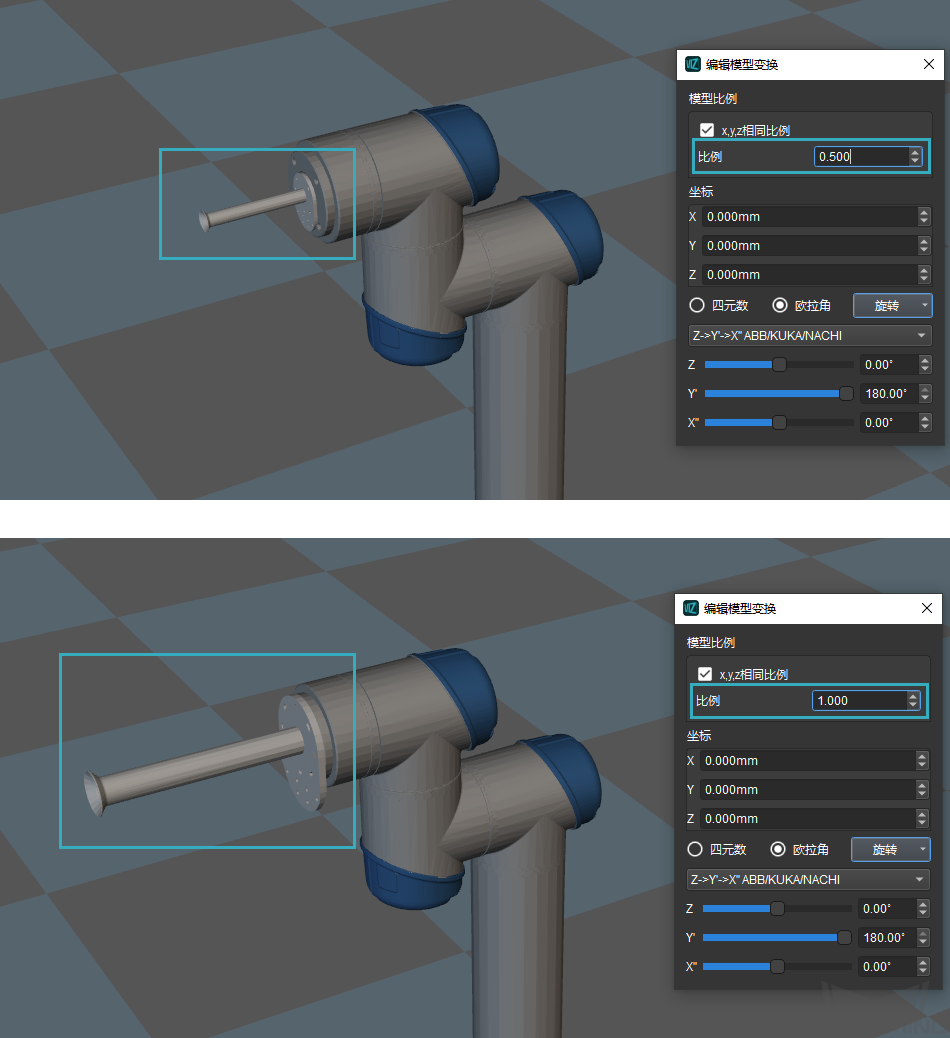
模型比例: 可通过设置模型比例对模型进行缩放,分别将比例设置为 0.500 和 1.000 后,模型缩放效果如下图所示。
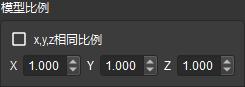
如果需要在 X、Y、Z 方向上单独设置缩放比例, 可取消勾选 x,y,z相同比例 ,然后分别填入 X、Y、Z 方向的缩放比例。
坐标: 通过修改 X、Y、Z 的值,可调整碰撞模型相对于机器人法兰的位置。
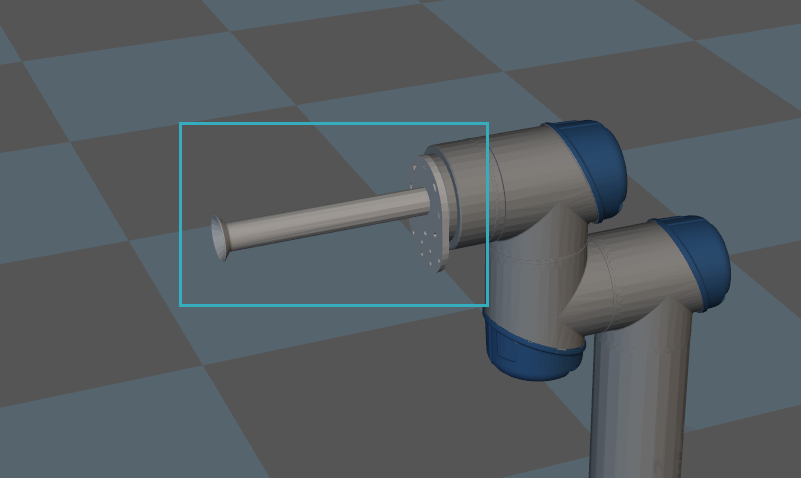
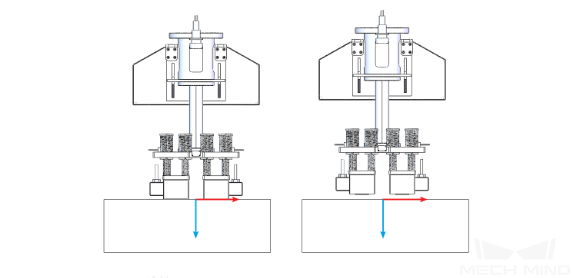
碰撞模型的正确位置应如下图所示。
单击添加好的碰撞模型名称,此模型会显示在 3D 仿真区,用户可以确认其位置是否正确。下图中,碰撞模型嵌入机器人模型,位置明显错误。
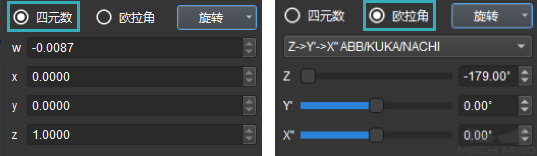
此时,可在编辑模型变换窗口中调整 X、Y、Z 的值、拖动Z 、Y’、X” 滑块来调整碰撞模型。效果如下图所示。
四元数、欧拉角: 单击 欧拉角 后,可拖动滑块来设置模型旋转角度。此时如需查看四元数形式下的相关旋转参数,可通过单击 四元数 查看。
关于模型的注意事项¶
对于没有特殊展示要求的工程,建议只添加碰撞模型,不添加 3D 模型。理由如下:
压缩工程体积:通常情况下,显示模型为了获得更好的显示效果,包含的模型细节信息更多,体积更大。
简化操作步骤:当夹具需要有位移时,仅添加了碰撞模型的情况下,只需设置一次位移即可;若 3D 模型和碰撞模型都添加了,则需要分别设置位移。
模型尺寸应略大于实际尺寸,理由如下:
Mech-Viz 软件中规划路径与机器人实际路径存在偏差。
夹具的加工装配存在误差,导致模型尺寸与实物尺寸会存在偏差。
模型 Z 方向的长度应略小于实际长度。
当工具为吸盘或带有弹簧缓冲装置时,工具 Z 方向允许存在一定程度的压缩。所以为了避免出现错误的碰撞检测结果,建议模型 Z 方向的长度略小于实际长度。
注解
在工具坐标系中,通常将夹具的工作方向定义为 Z 方向,Z 方向的长度指 TCP(工具中心点)到机器人法兰表面的距离。
简化模型。
模型表面特征越多,软件碰撞检测计算量越多,为提高计算速度,建议对模型进行简化。例如,去除模型内部不需要进行碰撞检测的结构、用平面代替曲面造型等。
具体的模型简化方法可参考 STL 模型简化思路 、 OBJ 模型简化思路 。
配置末端工具模型并调整 TCP¶
基于已添加的碰撞模型,接下来需添加并配置末端工具模型,并调整 TCP。
TCP 位于末端工具尖端点,为了完成物体抓取等任务,当让机器人移动至空间的某一点时,其本质是让 TCP 移动至该点。
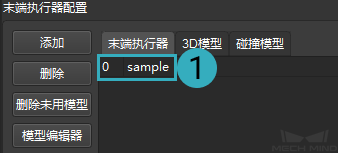
配置末端工具模型¶
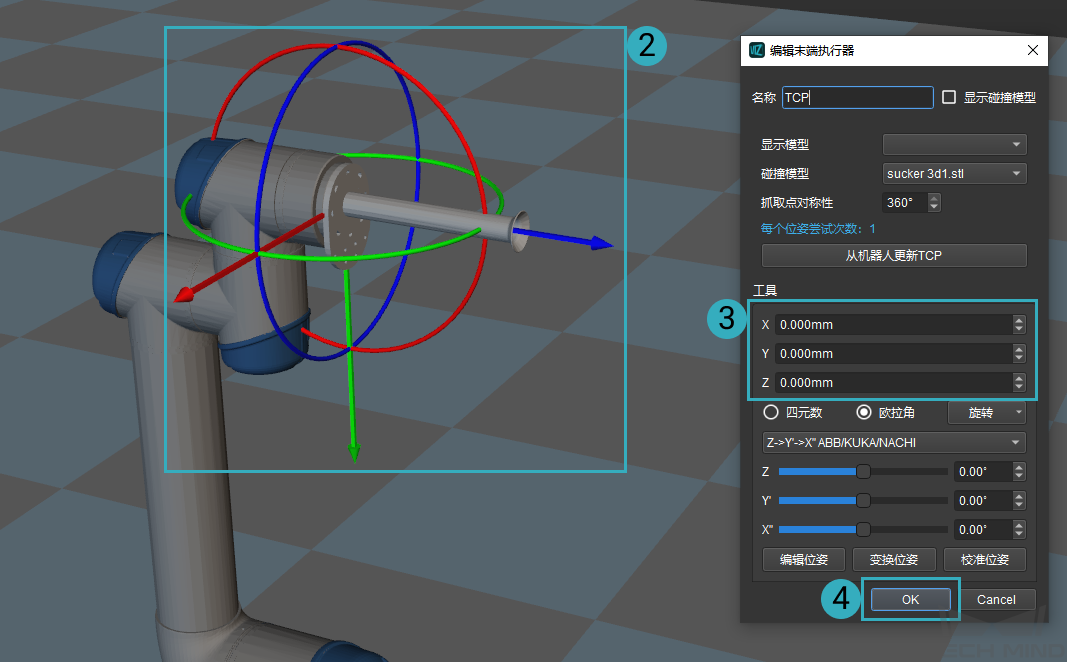
在末端工具配置面板中选择 末端工具 ,单击 添加 。在弹出的 编辑末端工具 窗口中进行相关设置,最后单击 OK 。

如上图中右图所示, 编辑末端工具 窗口中主要按钮或选项的功能描述如下:
名称: 设置末端工具的名称。
显示模型: 可在下拉框中选择已导入的显示模型。
碰撞模型: 可在下拉框中选择已导入的碰撞模型。
抓取点对称性: 与末端工具抓取物体的方式有关,用于选择最优的抓取位姿,可根据实际情况进行设定。
从机器人更新 TCP : 将真实机器人的 TCP 状态同步至 Mech-Viz 。
工具: 通过修改 X、Y、Z 的值,可调整 TCP 相对于末端工具的位置,调整效果如下图所示。
四元数、欧拉角: 单击 欧拉角 后,可拖动滑块来设置拖拽器(机器人模型末端的坐标球)旋转角度。此时如需查看四元数形式下的相关旋转参数,可通过单击 四元数 查看。
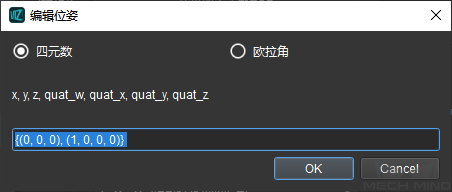
编辑位姿: 输入位姿数值对模型位姿进行编辑。
变换位姿: 定义变换的方式,将当前位姿变换到新位姿。
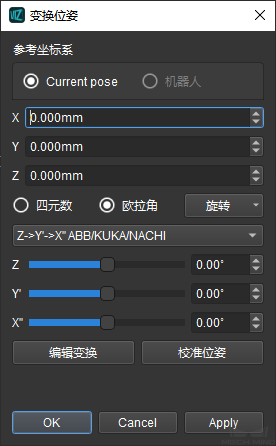
效果如下图所示:
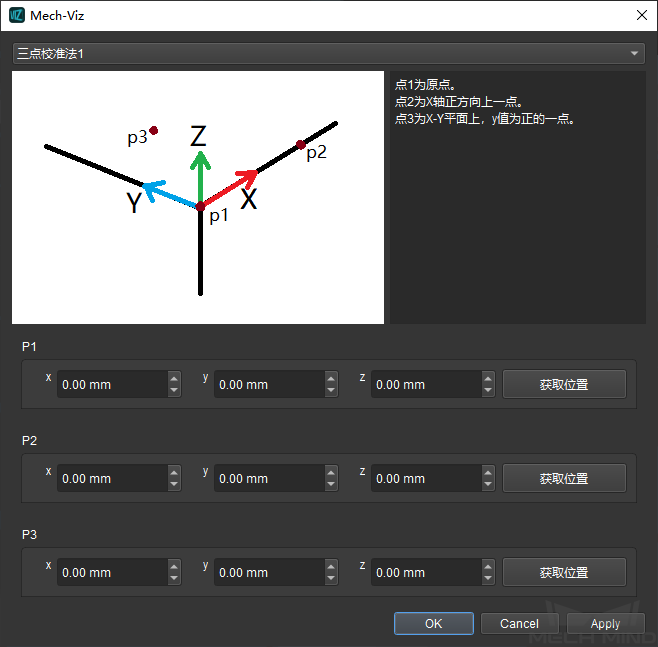
校准位姿: 按照弹窗提示设置 P1、P2 和 P3 点的坐标,并运用三点校准法对工具位姿进行校准。
调整 TCP¶
末端工具模型配置完成后,需调整 TCP 位置。
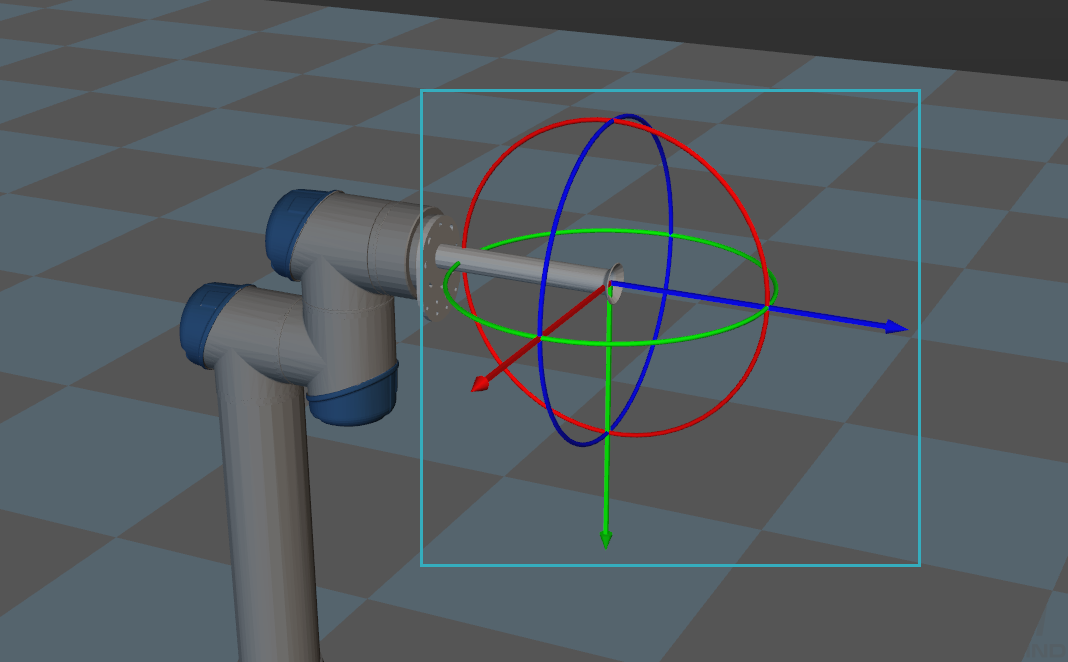
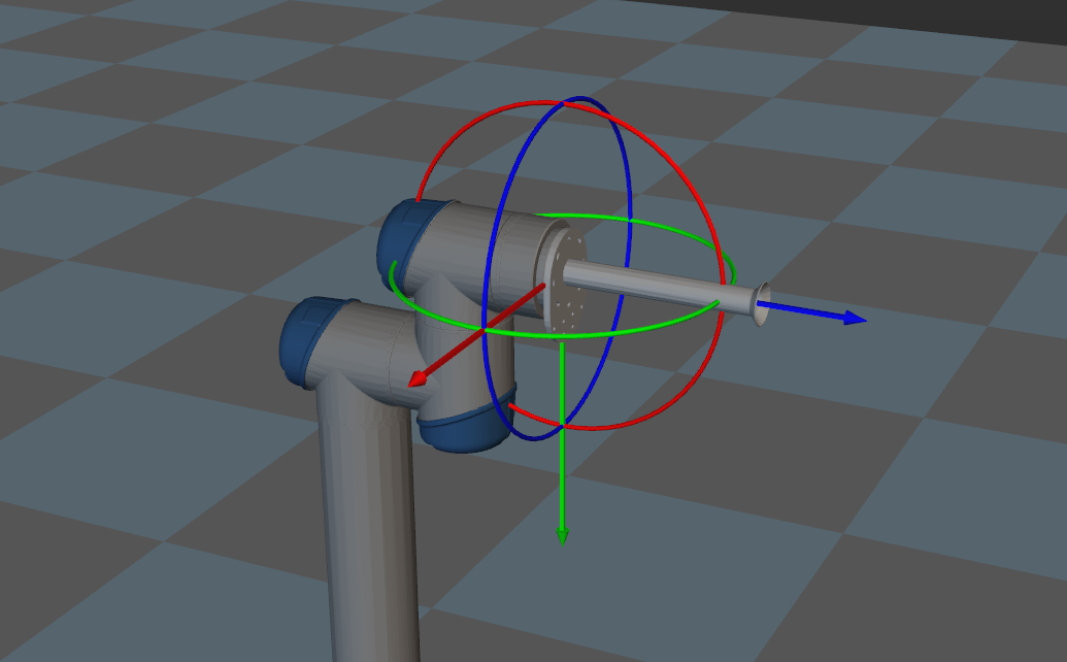
TCP 由拖拽器(机器人模型末端的坐标球)中心点表示,默认状态下的 TCP 如下图所示。
双击列表中末端工具名称,进入 编辑末端工具 窗口,通过修改 工具 的各项参数,调整 TCP 的位置,使其到达末端工具的末端。修改完成后,单击 OK 完成设置。
修改完成后,TCP 位置如下图所示。