被操作物体配置¶
在实际工程中,物体的抓取点选解通常不唯一。 为了增加物体的抓取点选解个数,提高抓取成功率,可以在被操作物体配置面板中设置旋转对称、抓取裕度等。
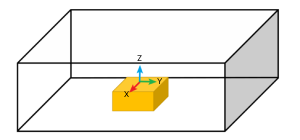
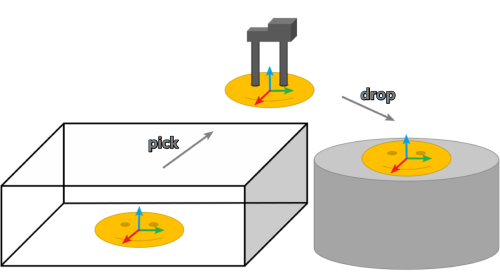
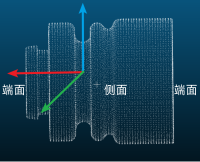
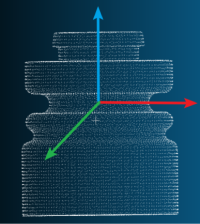
抓取点 代表物体上可以被机器人抓取的位置。这个点位于物体坐标系下,其位置和方向是相对于物体的。 常规情况下物体抓取点的 Z 轴指向朝上,如下图所示蓝色箭头为 Z 轴。
本节主要包括以下内容:
抓取点对称性¶
注解
本章中提到的“对称性”指的是“旋转对称性”。
把一个平面图形绕着平面上一个定点旋转某个角度后,与初始图形重合,这种图形叫做旋转对称图形,这个定点叫做旋转对称中心,旋转的角度叫做旋转角。
工程实践中经常遇到具有对称性的物体,按照此类物体的旋转角,机器人的夹具可以有多种方式抓取或放置物体,其抓取或放置的结果是相同的。 本章将按以下三类情况进行说明。


X/Y轴对称性物体¶
|

|

|

|
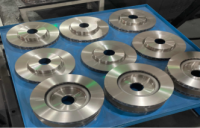
有序高反光钢棒 |
无序堆叠钢棒 |
油管接头 |
螺栓 |
夹具无柔性和活动量,物体为棒状或杆状等存在弧面的工件,此类工件在抓取时一般存在 X 轴或 Y 轴对称性,但不存在 Z 轴对称性。
旋转对称轴¶
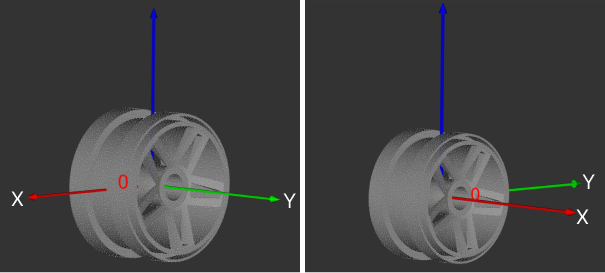
根据 Mech-Vision 中设置的抓取点确定。
在 Mech-Vision 的匹配模板与抓取点编辑器中设置工件的抓取点,左图所示抓取点的 Y 轴为旋转对称轴,右图所示抓取点的 X 轴为旋转对称轴。
步长¶
任意角度旋转对称对应的步长参数为 0 °,但在实际设置时一般不按 0° 设置。
设置过小会导致规划很慢,设置过大会遗漏抓取点,建议步长的值设置在 5° ~ 10° 。
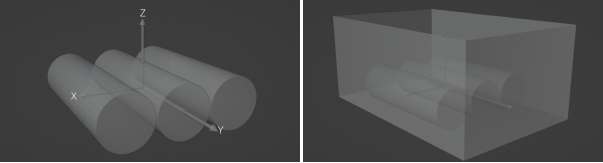
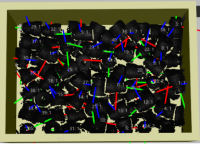
尝试范围¶
根据工件的可抓范围确定。
如下图所示,虽然工件成任意角度旋转对称,但受其他工件或料筐的影响,可抓范围远小于 360° 。

Z 轴对称性物体¶
|
|
|

|
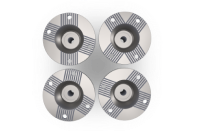
刹车盘(360°) |
法兰(180°) |
外星轮(60°) |
纸箱(180°) |
一般用于纸箱拆垛,或者圆盘、柱状物的抓取,物体本身存在一定的 Z 轴对称性,夹具可以不具备对称性,夹具沿抓取点 Z 轴旋转去抓取。
可以把下图示例看作工件在桌面上的俯视图,这样下面的旋转对称都是关于 Z 轴对称。

考虑抓取与放置(精确放置)¶
Z 轴步长设置为工件本身的旋转对称值。
仅考虑抓取不考虑放置(随意放置)¶
任意物体抓取场景中,圆形吸盘将物品吸起来,丢到指定位置或者筐内。磁铁吸取金属工件场景,吸取工件后将其丢到指定位置或者筐内。 在类似上述所述的场景中,仅要求夹具将物品抓取来即可,此时不需要考虑物品本身的对称性,按照任意角度旋转对称来设置 Z 轴步长。
应用示例¶
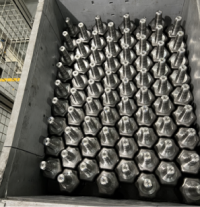
无序堆叠的小工件,当抓取端面朝上的工件时,关于抓取点 Z 轴成任意角度旋转对称。

场景图
点云
工件端面抓取点
参数设置如下。

抓取裕度¶
由于夹具(特别是吸盘)或者物体自身的适应性,抓取时,可允许夹具与物体存在一定偏差。 通过设置抓取裕度,机器人可以主动利用这样的“可容许偏差”来避免碰撞、奇异点等问题。 原理上,抓取裕度是基于抓取点的“可容许偏差”。
常见的两种使用情况如下:
夹具具有一定的柔性¶
下图所示为吸盘抓取包裹场景。
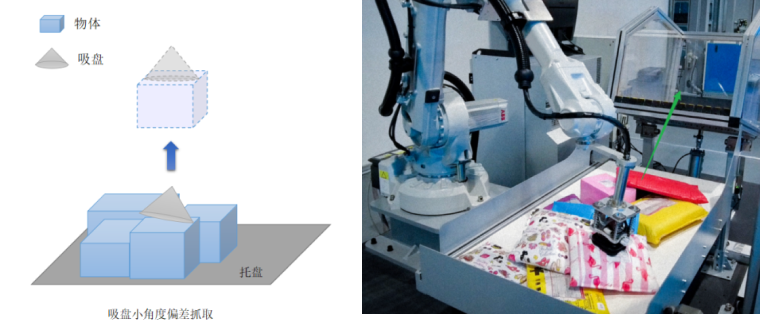
由于吸盘前端的海绵有一定柔性,可以允许在抓取时 X 轴和 Y 轴方向一定角度的倾斜。 所以可以设置抓取裕度,根据吸盘允许的变形量建议 尝试范围 设置为 ±5°~±10°, 步长 设置为 2°~5° 。

旋转对称和裕度的联合使用
上图示例中的被抓包裹沿 Z 轴成 90° 旋转对称,在设置裕度的同时可以设置 Z 轴旋转对称。

注意
每个位姿的尝试总次数 = 旋转对称的位姿尝试次数 × 抓取裕度的位姿尝试次数
位姿尝试次数过多将导致规划速度变慢。
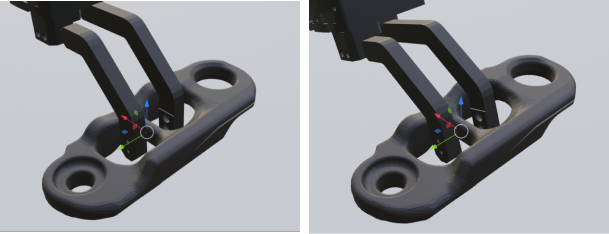
不要求精准放置¶
下图所示为链轨节的抓取,链轨节本身不存在对称性,但夹具可以沿抓取点的 X 轴旋转一定角度后再进行抓取。
旋转后末端工具的位姿发生改变,放置时末端工具需要补偿旋转的角度,这将改变链轨节在放置点的位姿。 由于不需要精确放置物体,故位姿的改变不会影响最终的放置结果。
参数设置为:

最优抓取选解策略¶
最优抓取选解策略选项有:
默认:选择 默认 时,将使用 全局转动最小 策略。
全局转动最小:选择此策略时,在“抓取-放置”全过程中,会优先选择使末端工具 Z 轴转动最小的点作为最优抓取点。此模式的优势是可以避免机器人在抓取物体之后进行无意义的转动,避免被抓物体掉落。
与视觉位姿的旋转差值最小:选择此策略时,会优先选择与 Mech-Vision 工程给出的物体位姿的偏差角度最小的点作为最优抓取点。假设物体位姿为 [0,0,0,15,0,0] ,该物体位姿的 Z 轴步长设置为 60° ,在尝试范围内,优先按照 [0,0,0,75,0,0] 与 [0,0,0,-45,0,0] 的位姿进行抓取。