1. 点云配置¶
点云一般为工程中需要进行处理的物品,在使用点云碰撞检测时需要确保需在 Mech-Vision 中使用了 发送点云到外部服务 步骤。
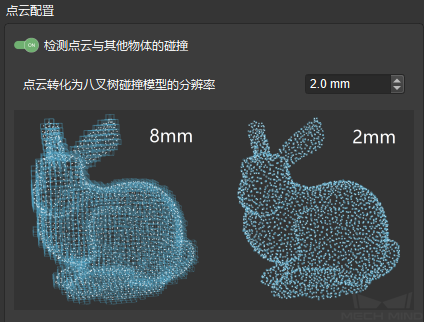
点云本身不会参与碰撞检查,需要先将点云转换为八叉树(八叉树即以点云为中心的小立方体),如果这些小立方体与机器人或夹具发生碰撞,则认为点云发生了碰撞。 通过修改 点云转化为八叉树碰撞模型的分辨率 ,可修改每一个小立方体的边长,如下图所示,左侧分辨率为10mm,右侧分辨率为2mm。 通过适当调整点云分辨率的大小,来使得立方体能够与点云较好地贴切,最终实现更加精确的点云碰撞检测。

对于同一个(块)点云:
八叉树分辨率越低体素立方的数量则会越多,计算更加精确同时时间也会越久。
八叉树分辨率越大体素立方的数量则会越少,计算更加粗糙但是计算速度会更快。
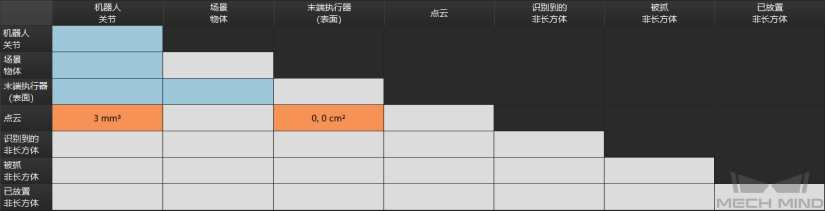
设置完成后,所得到的就是包含点云的碰撞检测场景,除默认检测的碰撞外,检测点云与机器人关节、点云与末端执行器,如下图所示。