碰撞检测配置¶
碰撞检测中有以下四种配置:
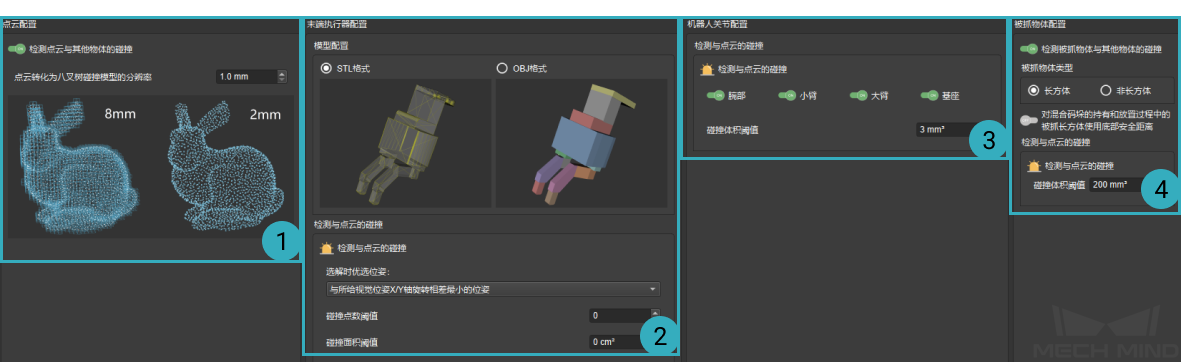
除上述四种配置外,软件默认检测:机器人关节与机器人关节碰撞 、机器人关节与场景物体碰撞 、机器人关节与末端工具(表面)碰撞、场景物体与末端工具(表面)碰撞,在详细了解以上四种配置后,用户可依据实际需求来配置碰撞检测。
碰撞检测中有以下四种配置:
除上述四种配置外,软件默认检测:机器人关节与机器人关节碰撞 、机器人关节与场景物体碰撞 、机器人关节与末端工具(表面)碰撞、场景物体与末端工具(表面)碰撞,在详细了解以上四种配置后,用户可依据实际需求来配置碰撞检测。