工具阵列¶
工具阵列目前仅支持单排多末端工具,工具阵列模式下,可调节参数如下图所示。
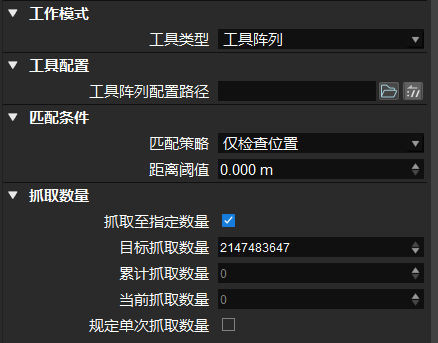
工具配置
- 工具阵列配置路径
单击
 选择工具阵列配置文件。使用 工具阵列配置器 可配置工具阵列并到导出 json 文件。
选择工具阵列配置文件。使用 工具阵列配置器 可配置工具阵列并到导出 json 文件。
匹配条件
- 匹配策略
“仅检查位置”只可调节“距离阈值”参数,“检查位置与方向”可调节“距离阈值”与“角度阈值”参数。
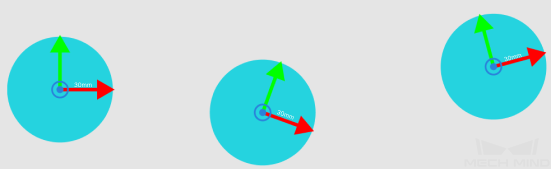
- 距离阈值
- 调节说明:以位姿为圆心,距离阈值为半径画圆,作为抓取位置。调节示例:
距离阈值为 30mm,抓取位置如下图所示。
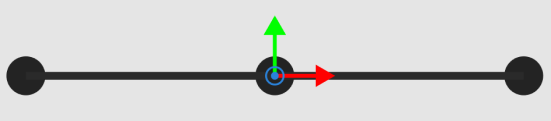
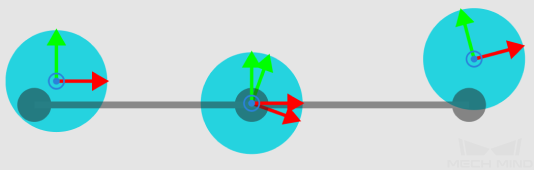
具有三个末端的工具阵列,末端间距 100 mm ,如下图所示。

抓取规划时,软件会尝试找到一个位置,将工具的三个末端都放到抓取位置(下图蓝色圆)中。
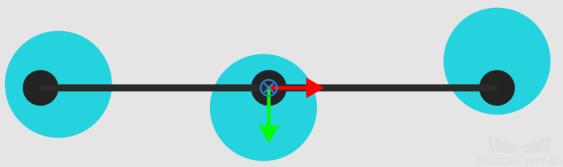
若无法全部匹配三个末端,则尝试只匹配两个末端。
- 角度阈值
- 调节说明:抓取位姿与工具位姿之间的夹角。调节示例:
软件将工具的 TCP 坐标绕自身 X 轴旋转 180°, 使其 Z 轴向上,与抓取点位姿朝向一致。
判断抓取点位姿与 TCP 各个轴之间的夹角。夹角在 角度阈值 内,成功抓取;否则失败。
该模式下,允许出现组合中间的物体有缺失,而有缺失的组合不是旋转对称的。例如有4个末端的工具阵列,末端编号分别为 0,1,2,3。如果只有3个物体,位置为 OOXO,则需要开启 0、1、3 末端。OOXO 旋转 180° 得到 OXOO,并不对称。
抓取数量
此参数组用于抓取计数,并自动计算剩余的抓取数量。如 目标抓取数量 中输入订单数量,即可实现订单抓取数量计数与订单剩余数量自动计算。
- 目标抓取数量
允许抓取物体的最大值。
- 累计抓取数量
已抓取物体的累计数量,软件自动计算,不可手动更改。
- 当前抓取数量
机器人当前抓取的数量,不可手动更改。