吸盘配置器¶
吸盘配置器目前仅支持矩形、单分区、多分区、单行、分区大小一致的吸盘配置。圆形、多行、分区大小不一致的吸盘,此配置界面不支持。
配置完成后软件可生成相应的配置文件,用户只需要将文件填入需要调用的窗口即可。
提示
根据实际机器人吸盘配置即可。
对于侧吸吸盘,仅配置底面即可,侧吸暂不支持多分区模式和 DI 检测。
吸盘配置¶
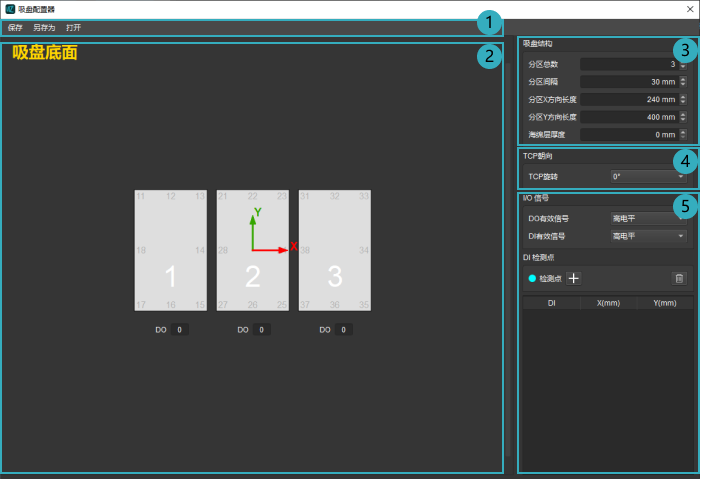
配置吸盘分区
在 吸盘配置区 中设置 分区总数 、 分区间隔 、 分区X方向长度 及 分区Y方向长度 (下图左侧所示),在 显示栏 中实时显示(下图右侧所示)。
海绵层配置用于碰撞检查的海绵层厚度,海绵层从 TCP 位置开始向下生成。分区开启时,海绵层厚度为设置厚度;分区关闭,海绵层厚度为 0。
提示
对于多块并列的矩形吸盘,如果多个分区共用同一个 DO 信号控制,则视为一个完整分区。在配置界面内配置时,只创建一个大的分区即可。
设置 TCP 朝向
TCP 旋转不同角度时,坐标系不同,见下表。请根据实际情况自行选择。

设置 I/O 信号
请根据实际机器人IO板类型选择 高电平 或 低电平 。
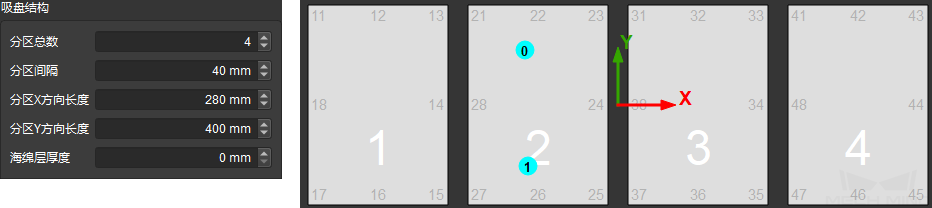
配置 DI 检测点
在 I/O 信号配置区 ,点击 + 新增检测点。检测点默认 DI 为 0,且在吸盘中间位置。
在 DI 中修改检测点名称,拖动检测点至合适位置,检测点坐标在 I/O 信号配置区 中显示。同理,修改坐标可移动检测点,如下图所示。

如需删除检测点,选中后,单击
 即可。
即可。设置 DO 数量
在显示栏对应吸盘下输入即可。