抓取单个箱子 + 侧吸吸盘¶
可调节参数如下图所示。
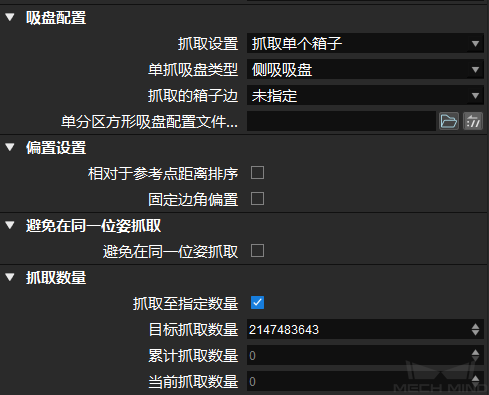
吸盘配置
- 抓取的箱子边
分为 未指定 、 长边 或 短边 三种情况,请根据实际情况选择。
- 单分区方形吸盘配置文件路径
单击
 选择吸盘配置文件。使用 吸盘配置器 来配置吸盘并导出 json 文件。
选择吸盘配置文件。使用 吸盘配置器 来配置吸盘并导出 json 文件。
偏置设置
- 相对于参考点距离排序 - 参考点X/Y坐标
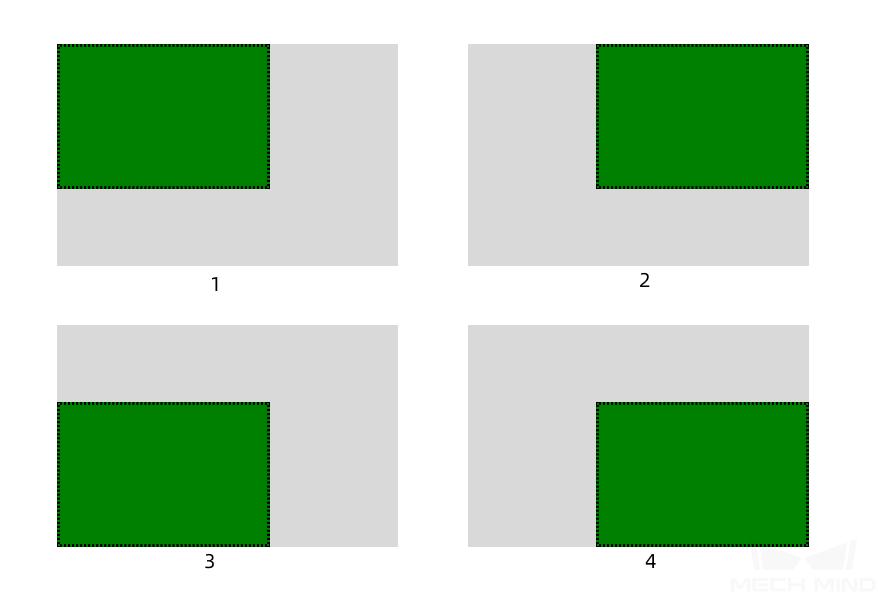
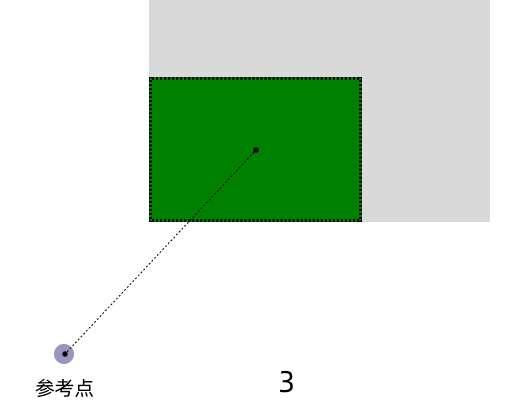
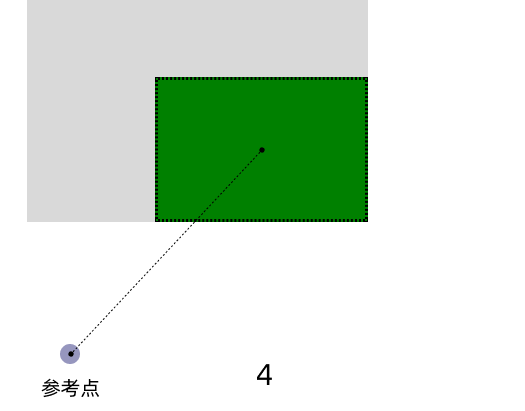
- 调节说明:使用此参数需设置一个参考点坐标,规划抓取时会优先规划夹具靠近参考点的抓取方式。此功能不支持与物体对称性一同设置。调节示例:如下图(俯视图视角)所示,箱子为绿色,方形单分区吸盘为灰色,有如下四种抓取策略。
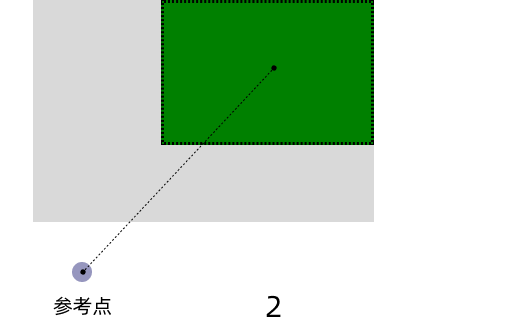
 参考点位于纸箱左下角,参考点与纸箱的相对位置固定,抓取时优先使用夹具靠近参考点的位置。因此根据下图所示,规划优先顺序为: 。
参考点位于纸箱左下角,参考点与纸箱的相对位置固定,抓取时优先使用夹具靠近参考点的位置。因此根据下图所示,规划优先顺序为: 。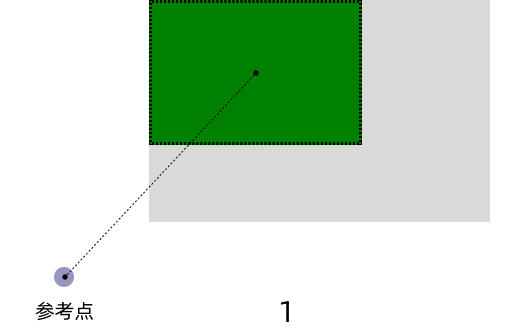
- 仅保留排序靠前的偏置 - 最大规划解数量
- 调节说明:默认值为 2。根据参考点规划的次数设置。调节示例:参考上述示例,若此参数设置为2 ,则只保留2与1规划策略。
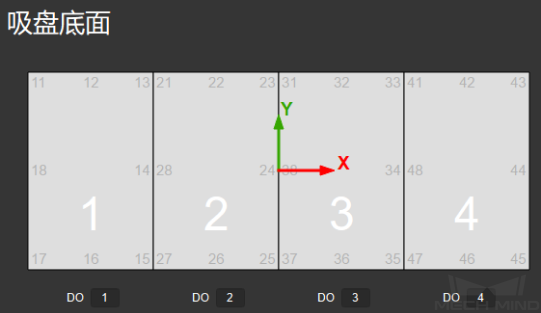
- 固定边角偏置 - 固定的边角编号
- 输入吸盘边角号即可。吸盘边角编号规则:吸盘编号 0~8,其中 0 表示中点,1、3、5、7 表示吸盘角,2、4、6、8 表示边。边角号为分区号与吸盘编号组成的数字,如下图所示。
避免在同一位姿抓取
此组参数主要用在抓取失败的场景中,避免在同一个位置上重复失败。
- 优先级降低的范围半径上限
- 默认值:0。调节说明:若某位姿与上次抓取的位姿的空间直线距离小于此值,则判定这两个位姿为是同一位姿,抓取优先级降低。
- 直接丢弃的范围半径上限
- 默认值:0。调节说明:若某位姿与上次抓取的位姿的空间直线距离小于此阈值,则丢弃此位姿。应用示例:假设抓取某个曲轴,第一次尝试未将曲轴抓起,但尝试抓取的过程中戳动曲轴,位置移动后下次抓取可能成功。因此, 使用 优先级降低的范围半径上限 降低其优先级但并不丢弃。若尝试抓取时曲轴纹丝不动,再次抓取基本上也不可能成功,使用 直接丢弃的范围半径上限 丢弃该位姿,避免反复抓取。
- 避免对象列表最大长度
- 默认值:1。调节说明:避免抓取对象(工件位姿或工件)的最大数量。队列格式,先进先出。应用示例:假设该参数值设置为 2,Mech-Vision 输出 3 个位姿。位姿 1 抓取不成功,记录位姿 1;位姿 2 抓取不成功,记录位姿 2;位姿 3 抓取不成功,记录位姿 3。但此时会忘记位姿 1,只记录位姿 2、3。
- 避免对象类型
- 工件位姿:按被抓物体位姿记录。若物体有三个抓取点,其中某一位姿被记录抓取过,其剩下两个抓取位姿依旧认为未抓取过。工件:按被抓物体记录。若物体的某一位姿被记录抓取过,则下次抓取时认为剩下的位姿均已抓取过,从而不再优先抓此物体。
抓取数量
此参数组用于抓取计数,并自动计算剩余的抓取数量。如 目标抓取数量 中输入订单数量,即可实现订单抓取数量计数与订单剩余数量自动计算。
- 目标抓取数量
允许抓取物体的最大值。
- 累计抓取数量
已抓取物体的累计数量,软件自动计算,不可手动更改。
- 当前抓取数量
机器人当前抓取的数量,不可手动更改。