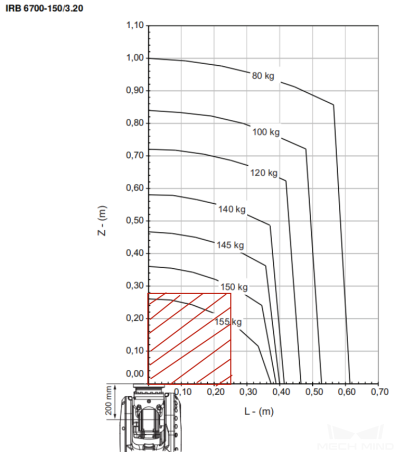
机器人选型 您正在查看V1.8.3版本的文档。如果您想查阅其他版本的文档,可以点击页面右上角“切换版本”按钮进行切换。 ■ 如果您想使用最新版本,可以从梅卡曼德下载中心下载。 ■ 如果您不确定当前使用的产品是哪个版本,请随时联系梅卡曼德技术支持。 本节将介绍如何进行机器人选型。 复核机器人负载 复核机器人负载时,应综合考虑夹具重量、被抓物体重量、管线重量等因素,同时要求机器人 J6 轴法兰重心和扭矩的关系需要符合机器人负载特性曲线。 确认机器人可达性 可通过多种方法确认机器人的可达性,如:Mech-Viz、CAD、robcad、RobotStudio 等。 如下图所示,为通过Mech-Viz查看的机器人可达性。 选择机器人自由度 下文将分别以单品类麻袋拆垛、开盖周转箱拆垛为例,对选择机器人自由度时的注意事项进行介绍。 单品类麻袋拆垛 序号 注意事项 图示 1 充分考虑可能的来料形式。如图所示,当麻袋来料有俯仰角和翻滚角度时,建议选择六轴机器人。 2 考虑后道工序的需求,破包后需要机器人旋转至多个姿态,完成倒料(如图所示),建议选择六轴机器人。 开盖周转箱拆垛 序号 注意事项 图示 1 由于托盘或托盘放置面的水平度问题,可能导致来料周转箱倾斜,此时不建议选择四轴机器人。 2 多周转箱抓取时,周转箱上表面存在如图所示的偏转角度,此时不建议选择四轴机器人。 确定通信方式 选择的机器人型号需能够与视觉系统正常通信。 如果使用标准接口通信方式,需确认选择的机器人品牌和型号支持与视觉系统进行标准接口通信,且机器人控制器满足软硬件要求。详细信息可参考 标准接口通信 。 如果使用主控通信方式,需确认选择的机器人品牌和型号支持与视觉系统进行主控通信,且机器人控制器满足软硬件要求。详细信息可参考 主控通信 。 该页面是否有帮助? 我要反馈 感谢您的支持! 可以通过以下方式反馈意见: 社区 反馈表单 夹具设计 安装场景要求