安装场景要求
本节以有序圆柱体轴棒上料方案安装场景为例,详细讲述了该方案在工位安装场地、光照条件、供电以及供气等方面的具体要求。
地面与楼板
梅卡曼德视觉系统通常与机器人、输送线、机械加工中心等配合使用,机器人对地面或楼板要求较高,具体要求如下。
-
水泥混凝土地面与楼板:
静载荷 材料 混凝土等级 混凝土浇筑深度 ≥ 3 T/m²
混凝土
不低于 C30
不低于 150 mm,推荐深度为 200 mm 以上。
-
花纹钢地面与楼板:
-
机器人安装位置的静载荷不低于 3 T/㎡。
-
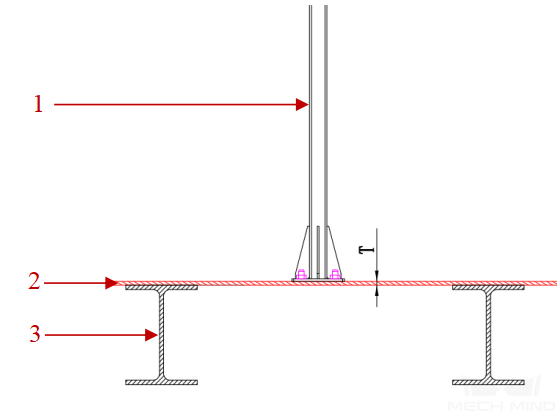
相机支架安装位置下方应有横梁作为支撑,禁止出现如下图所示的安装方式,其中 1 为相机支架,2 为花纹钢,3 为横梁。
-
安装空间
在实际项目中,需考虑相机视野和机器人抓取空间的要求,以及其他干扰因素。具体注意事项如下。
-
工位的安装位置净空高度应不小于 4 m,以确保相机视野能够覆盖抓取区域,以及机器人的活动空间充足。
-
机器人运动范围内应避免出现立柱或其他障碍物,以确保机器人能够自由移动,且不会受到障碍物的干扰。
-
安装相机时,相机下方不得有任何遮挡相机视野的物体,以确保相机能够正常拍摄到目标物体,并提供准确的视觉信息。
-
在规划相机安装位置时,需避免楼层主梁、次梁、消防水管、人造光源或风管等物体对相机视野的影响,以确保相机能够正常安装。
光照情况
现场的光照情况会对 3D 相机的成像效果产生较大的影响,具体影响因素及解决方案如下。
因素一:现场光照过强
-
情况描述:
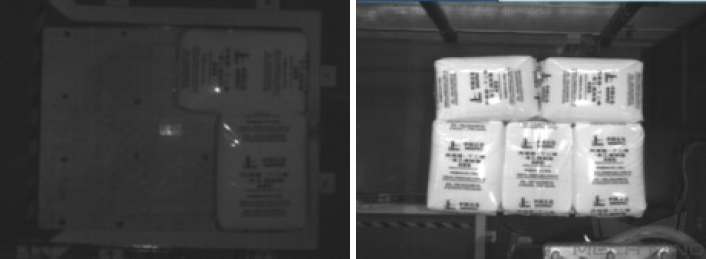
该因素将导致图像过曝,相机无法获取到合格的 2D 图像和点云。现场常见的强光来源如下图所示。

-
解决方案:
-
为获得良好的图像数据,建议选择激光相机(LSR S、LSR L)。
-
当现场光照过强,激光相机无法满足需求时,需考虑设计遮光方案,具体内容可参考遮光方案。
-

供电情况(参考)
| 电网 | 三相电压 | 频率 | 接地方式 | 功耗 |
|---|---|---|---|---|
TN-S 网络(三相五线制,3-ph,N,PE) |
380 V 交流电压,±10% |
50 Hz,± 1 Hz |
联合接地方式(电阻值要求不大于 4 Ω) |
单个工位功耗不低于 14 kVA |
压缩气体(客供)
对于压缩气体的使用,干燥、清洁和无油污是关键要求。同时,需要注意压力稳定性、温度控制和湿度控制,并确保提供充足的气体流量以满足视觉系统需求。具体要求如下。
-
清洁、干燥、无油污:为了保证视觉系统正常运行和延长气动元件的寿命,压缩气体应通过使用合适的过滤器和干燥器来实现清洁、干燥和去除油污处理。另外,压缩气体也不应含有有机溶剂、盐分以及腐蚀性气体等成分。
-
气体压力:通过使用适当的调压阀和稳压装置,使压缩气体的工作压力应在 0.6 MPa 至 0.8 MPa 之间,且压力波动应小于 10%。
-
温度和湿度:压缩气体的温度应在 -5 ℃ 至 70 ℃ 之间。在低于 5 ℃ 时,需注意去除水分,以防止结冰或产生其他问题。此外,相对湿度应控制在 80% 以下,避免过高的湿度对视觉系统造成影响。
-
气体流量:根据所选用的气动元件和实际需求,并通过合理设计系统和选择适当规格的压缩机,来确保提供充足的压缩气体流量。
环境粉尘

工控机防尘
在高浓度粉尘环境中,由于设备长期工作,其表面温度比环境温度高,因此很容易导致灰尘颗粒吸附在设备表面或电器的外露接口(如工控机网口等),从而造成接口或触点接触不良,进而影响信号质量,严重情况下,还会导致工控机中的元器件发生短路。此时,应做好工控机、相机防尘。
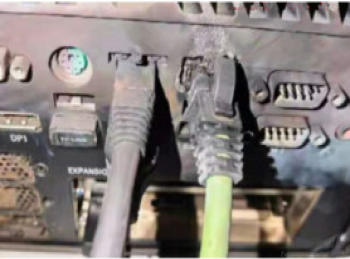
如下图所示,大量金属粉尘附着在网口,导致网口烧损,甚至出现网口冒火花的情况,最终导致工控机内部元器件无法修复。此外,显示器接口及其线缆也可能遇到相似问题。
一般情况下,工控机被安置于柜体中,可利用密闭空间进行防尘。然而在恶劣环境中,灰尘或许仍会渗入柜体。因此,应对工控机柜体采取有效的防尘措施。
-
柜体内灰尘主要来源:
柜体由钣金焊接并组装,可能存在缝隙。
过线孔、通风口等未完全密封。
柜体表面的风扇口易带入灰尘。
-
柜体防尘措施:
要求柜体钣金满焊,禁止出现点焊、断焊等现象。
使用毛刷或塔形橡胶密封件密封过线孔。
综合考虑过滤等级与气流阻力,选择合适等级的防尘网材料,并定期检查和维护,防止堵塞。
相机防尘
在高浓度粉尘环境中使用相机时,会对相机造成损伤,影响相机的成像效果和使用寿命。为解决上述问题,可为相机安装保护装置来保护相机。相机保护装置设计方法可参考高浓度粉尘场景中相机保护装置设计。