方案基本信息
本节介绍单品类麻袋拆垛方案的基本信息,包括适用范围、不支持的功能、技术指标。
适用范围
本节将从麻袋类型、项目需求、麻袋表面特征等方面介绍单品类麻袋拆垛方案的适用范围。
麻袋类型
该方案对麻袋类型的适用范围如下表所示。
| 适用范围 | 图示 | 不适用范围 | 图示 |
|---|---|---|---|
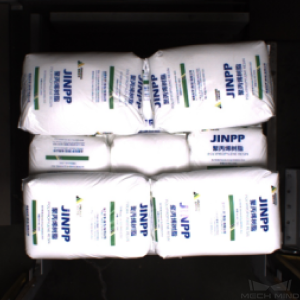
码放整齐的编织袋、麻袋、纸袋等,且上表面近似矩形,如普通塑料编织袋、牛皮纸袋。 |
|
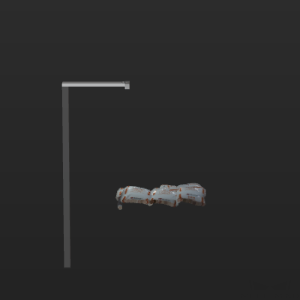
散乱堆叠、透明、尺寸过小的袋子,如零食袋、盐水袋等。 |
|




麻袋表面特征
该方案对麻袋表面特征的适用范围如下表所示。
| 适用范围 | 图示 | 不适用范围 | 图示 |
|---|---|---|---|
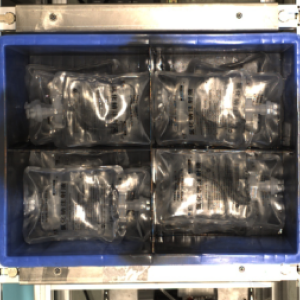
麻袋边缘清晰,深度学习可以对麻袋进行区分。麻袋表面的颜色可为单色或彩色,且表面可存在花纹、字体等。 |
|
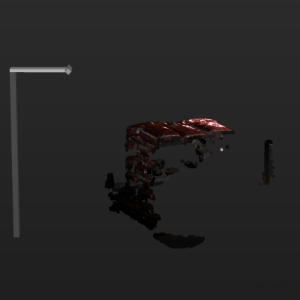
麻袋边缘不清晰,深度学习无法准确区分麻袋。麻袋表面图案复杂,麻袋互相紧贴或压叠,导致深度学习无法稳定识别。 |
|




麻袋摆放方式
该方案对麻袋摆放方式的适用范围如下表所示。
| 适用范围 | 图示 | 不适用范围 | 图示 |
|---|---|---|---|
麻袋在相机视野中水平摆放,且倾斜角度在 0°~45°。 |
|
麻袋在相机视野中倾斜摆放,倾斜角度大于 45°。可能会导致深度学习识别错误。 |
|


尺寸信息
该方案对麻袋尺寸信息的适用范围如下表所示。
| 适用范围 | 不适用范围 |
|---|---|
由于Mech-Vision将读取传入的真实麻袋尺寸,所以适用于识别已知尺寸的麻袋。 |
由于Mech-Vision需根据麻袋尺寸来防止深度学习误识别,所以不适用于识别未知尺寸的麻袋。 |
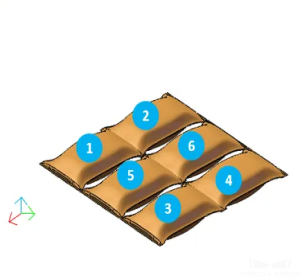
麻袋抓取顺序
该方案对麻袋抓取顺序的适用范围如下表所示。
| 适用范围 | 图示 |
|---|---|
不适用范围 |
图示 |
|
|
根据麻袋垛型、夹具抓取方式进行非常规的自定义顺序。 |
|
不支持的功能
单品类麻袋拆垛方案不支持如下功能。
-
识别麻袋正反/朝向/型号。若想实现此功能,麻袋正反面特征、麻袋不同朝向特征、各型号麻袋特征需存在明显差异。满足以上前提后,需先获得单个麻袋的彩色图,然后利用目标检测模型来区分单个麻袋的正反面、袋口朝向、麻袋型号。
-
识别并抓取托盘。若想实现此功能,需另外搭建一个识别托盘的工程。
-
使用双抓手夹具实现一拍多抓。若想实现此功能,需先识别出最上层所有的麻袋,然后对麻袋位姿进行特殊排序,再将所有的麻袋位姿发送给机器人。
-
识别麻袋垛型。若想实现此功能,需先识别出最上层的所有麻袋,同时需预先设定好包含的垛型,然后根据麻袋位姿来判断该垛型属于哪种垛型。
-
识别麻袋规格。由于麻袋易变形,会影响视觉识别的精度。