C++(Windows)
本章介绍如何在Windows系统中使用CMake配置Mech-Eye API的C++例程,并使用Visual Studio构建例程。
例程简介
目前提供了如下例程:
-
TriggerWithSoftwareAndFixedRate:通过软触发 + 固定频率的方式触发数据采集,然后获取并保存采集的数据。
-
TriggerWithExternalDeviceAndFixedRate:通过外部触发 + 固定频率的方式触发数据采集,然后获取并保存采集的数据。
-
TriggerWithSoftwareAndEncoder:通过软触发 + 编码器的方式触发数据采集,然后获取并保存采集的数据。
-
TriggerWithExternalDeviceAndEncoder:通过外部触发 + 编码器的方式触发数据采集,然后获取并保存采集的数据。
-
TriggerMultipleProfilersSimultaneously:异步触发多台轮廓测量仪进行采集,然后获取并保存采集的数据。
-
BlindSpotFiltering:识别并去除死角造成的错误数据,然后获取过滤后的轮廓线数据。
-
NoiseRemoval:去除深度数据中的噪点,然后获取过滤后的轮廓线数据。
-
ProfileAlignment:校正轮廓线中沿X轴和Z轴方向的振动(即对齐轮廓线),然后校正后的轮廓线数据。
-
RenderDepthMap:获取并保存使用jet配色方案渲染的深度图。
-
TransformPointCloud:获取并保存自定义坐标系下的点云。
-
ManageUserSets:管理参数组,如获取所有参数组的名称、新增参数组、切换参数组和保存参数设置至参数组。
-
PrintProfilerStatus:获取并打印轮廓测量仪型号、序列号、固件版本、温度等信息。
-
RegisterProfilerEvent:定义并注册检测轮廓测量仪事件的回调函数。
-
UseVirtualDevice:获取虚拟设备中储存的轮廓线数据,并生成和保存强度图和深度图。
| 关于触发轮廓测量仪进行数据采集的不同方式,请参考触发数据采集的方式。 |
获取例程
C++例程包含在Mech-Eye SDK的安装路径中,也可从GitHub克隆获取。安装路径中的例程为Mech-Eye SDK发布时的版本,GitHub上的例程可能包含最新修改。
-
安装路径中的例程位于xxx/Mech-Eye SDK-2.4.1/API/samples/cpp/profiler路径下;
-
通过GitHub克隆获取的例程位于xxx/mecheye_cpp_samples/profiler路径下。
安装必需软件
使用Mech-Eye API的C++例程,必须安装Mech-Eye SDK、CMake及Visual Studio。
安装最新版本的Mech-Eye SDK
请根据Mech-Eye SDK安装指南安装或升级Mech-Eye SDK。
安装CMake(3.2或以上版本)
-
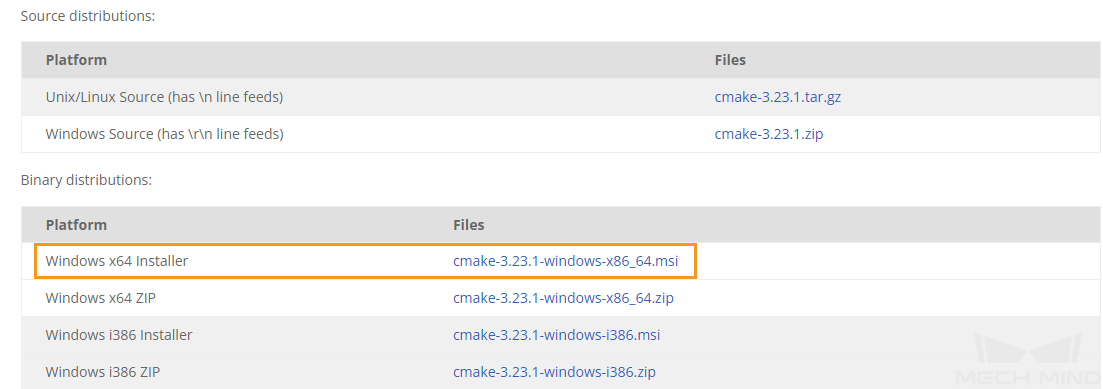
下载CMake:下载Windows x64 Installer右侧的安装包。
-
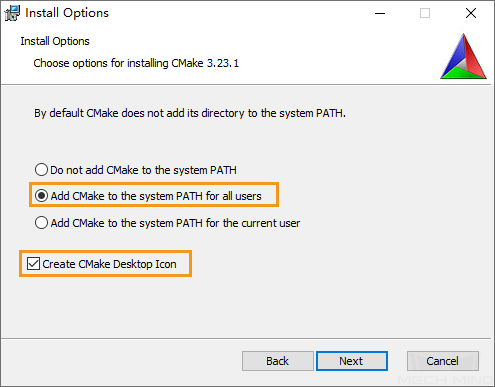
安装时,请选择以下两个选项,以将CMake添加至环境变量,并创建CMake的桌面快捷方式。
-
Add CMake to the system PATH for all users
-
Create Cmake Desktop Icon
-
(可选)安装依赖的软件库
部分例程中的功能依赖以下第三方软件库。如需使用下表中列出的例程,则必须安装其依赖的软件库。
-
OpenCV:3.4.5或以上版本
| 如未安装可选软件库,则配置例程前必须执行禁用不需要的例程(可选)中的操作。 |
依赖第三方软件库的例程详见下表。
| 例程 |
|---|
BlindSpotFiltering |
NoiseRemoval |
ProfileAlignment |
RenderDepthMap |
TriggerWithSoftwareAndFixedRate |
TriggerWithExternalDeviceAndFixedRate |
TriggerWithSoftwareAndEncoder |
TriggerWithExternalDeviceAndEncoder |
TriggerMultipleProfilersSimultaneously |
UseVirtualDevice |
安装OpenCV
-
下载并安装OpenCV。请记录OpenCV的安装路径。
-
将OpenCV添加至环境变量:
-
右键单击桌面上的此电脑,选择属性。
-
选择高级系统设置,再在弹出的系统属性窗口单击环境变量,进入环境变量界面。
-
双击Path变量进入编辑环境变量页面。单击右上角新建,依次添加以下路径。添加完成后,单击右下角确定。
-
xxx/OpenCV/build/x64/vc14/bin
-
xxx/OpenCV/build/x64/vc14/lib
-
-
| 添加环境变量后,请重启电脑,否则可能导致添加的环境变量不生效。 |
构建及运行例程
你可以一次性构建全部例程,也可以仅构建单独一个例程。
| 本节以安装路径中包含的例程为例提供相关路径,如使用从GitHub克隆获取的例程,需对应更改路径。 |
禁用不需要的例程(可选)
| 未安装可选软件库的情况下一次性构建全部例程时,必须进行该节的操作。否则使用CMake配置例程时将报错。 |
如不需要使用依赖OpenCV的例程,在一次性构建全部例程前,需对CMakeLists文件进行编辑,禁用这些例程。
-
打开xxx/Mech-Eye SDK-2.4.1/API/samples/cpp/profiler路径下的CMakeLists.txt。
-
编辑
option语句:找option(USE_OPENCV…)行,将行末的ON改为OFF,可禁用依赖OpenCV的例程。 -
保存修改后,关闭CMakeLists.txt。
使用CMake配置例程
-
右键单击CMake并选择以管理员身份运行。
-
输入源码路径与构建目录路径。
-
如需一次性构建所有例程,请输入如下路径。
Where is the source code
xxx/Mech-Eye SDK-2.4.1/API/samples/cpp/profiler
Where to build the binaries
xxx/Mech-Eye SDK-2.4.1/API/samples/cpp/profiler/build
-
如需单独构建某一例程,请输入如下路径。将路径中的SampleName替换为例程名称。
Where is the source code
xxx/Mech-Eye SDK-2.4.1/API/samples/cpp/profiler/SampleName
Where to build the binaries
xxx/Mech-Eye SDK-2.4.1/API/samples/cpp/profiler/SampleName/build
-
-
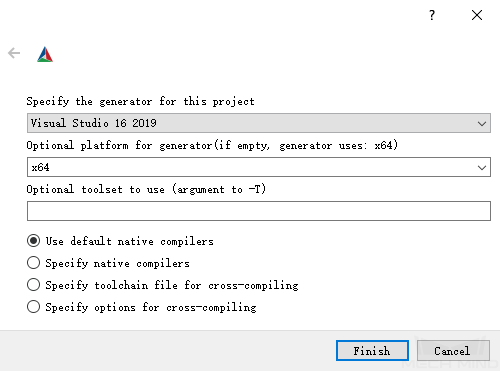
单击Configure,进入配置页面。选择Visual Studio的版本,并将平台设置为x64,然后单击Finish。配置成功后,日志最末行将显示Configuring done。
-
单击Generate生成解决方案。生成成功后,日志最末行将显示Generating done。然后,单击Open Project,使用Visual Studio打开解决方案。
使用Visual Studio构建例程
-
在Visual Studio工具栏中,将解决方案配置从Debug改为Release模式。
-
在菜单栏中选择。每个例程会生成对应的可执行文件(.exe),保存在Release文件夹中,位于在CMake中输入的Where to build the binaries目录下。